Accountable Logging in Operating Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Efficient Inter-Core Communications on Manycore Machines
ZIMP: Efficient Inter-core Communications on Manycore Machines Pierre-Louis Aublin Sonia Ben Mokhtar Gilles Muller Vivien Quema´ Grenoble University CNRS - LIRIS INRIA CNRS - LIG Abstract—Modern computers have an increasing num- nication mechanisms enabling both one-to-one and one- ber of cores and, as exemplified by the recent Barrelfish to-many communications. Current operating systems operating system, the software they execute increasingly provide various inter-core communication mechanisms. resembles distributed, message-passing systems. To sup- port this evolution, there is a need for very efficient However it is not clear yet how these mechanisms be- inter-core communication mechanisms. Current operat- have on manycore processors, especially when messages ing systems provide various inter-core communication are intended to many recipient cores. mechanisms, but it is not clear yet how they behave In this report, we study seven communication mech- on manycore processors. In this report, we study seven anisms, which are considered state-of-the-art. More mechanisms, that are considered state-of-the-art. We show that these mechanisms have two main drawbacks that precisely, we study TCP, UDP and Unix domain sock- limit their efficiency: they perform costly memory copy ets, pipes, IPC and POSIX message queues. These operations and they do not provide efficient support mechanisms are supported by traditional operating sys- for one-to-many communications. We do thus propose tems such as Linux. We also study Barrelfish message ZIMP, a new inter-core communication mechanism that passing, the inter-process communication mechanism of implements zero-copy inter-core message communications and that efficiently handles one-to-many communications. -

D-Bus, the Message Bus System Training Material
Maemo Diablo D-Bus, The Message Bus System Training Material February 9, 2009 Contents 1 D-Bus, The Message Bus System 2 1.1 Introduction to D-Bus ......................... 2 1.2 D-Bus architecture and terminology ................ 3 1.3 Addressing and names in D-Bus .................. 4 1.4 Role of D-Bus in maemo ....................... 6 1.5 Programming directly with libdbus ................. 9 1 Chapter 1 D-Bus, The Message Bus System 1.1 Introduction to D-Bus D-Bus (the D originally stood for "Desktop") is a relatively new inter process communication (IPC) mechanism designed to be used as a unified middleware layer in free desktop environments. Some example projects where D-Bus is used are GNOME and Hildon. Compared to other middleware layers for IPC, D-Bus lacks many of the more refined (and complicated) features and for that reason, is faster and simpler. D-Bus does not directly compete with low level IPC mechanisms like sock- ets, shared memory or message queues. Each of these mechanisms have their uses, which normally do not overlap the ones in D-Bus. Instead, D-Bus aims to provide higher level functionality, like: Structured name spaces • Architecture independent data formatting • Support for the most common data elements in messages • A generic remote call interface with support for exceptions (errors) • A generic signalling interface to support "broadcast" type communication • Clear separation of per-user and system-wide scopes, which is important • when dealing with multi-user systems Not bound to any specific programming language (while providing a • design that readily maps to most higher level languages, via language specific bindings) The design of D-Bus benefits from the long experience of using other mid- dleware IPC solutions in the desktop arena and this has allowed the design to be optimised. -

Inter-Process Communication, Analysis, Guidelines and Its Impact on Computer Security
The 7th International Conference for Informatics and Information Technology (CIIT 2010) INTER-PROCESS COMMUNICATION, ANALYSIS, GUIDELINES AND ITS IMPACT ON COMPUTER SECURITY Zoran Spasov Ph.D. Ana Madevska Bogdanova T-Mobile Macedonia Institute of Informatics, FNSM Skopje, Macedonia Skopje, Macedonia ABSTRACT Finally the conclusion will offer a summary of the available programming techniques and implementations for the In this paper we look at the inter-process communication Windows platforms. We will note the security risks and the (IPC) also known as inter-thread or inter-application best practices to avoid them. communication from other knowledge sources. We will look and analyze the different types of IPC in the Microsoft II. INTER -PROCESS COMMUNICATION (IPC) Windows operating system, their implementation and the usefulness of this kind of approach in the terms of Inter-Process Communication (IPC) stands for many communication between processes. Only local techniques for the exchange of data among threads in one or implementation of the IPC will be addressed in this paper. more processes - one-directional or two-directional. Processes Special emphasis will be given to the system mechanisms that may be running locally or on many different computers are involved with the creation, management, and use of connected by a network. We can divide the IPC techniques named pipes and sockets. into groups of methods, grouped by their way of This paper will discuss some of the IPC options and communication: message passing, synchronization, shared techniques that are available to Microsoft Windows memory and remote procedure calls (RPC). We should programmers. We will make a comparison between Microsoft carefully choose the IPC method depending on data load that remoting and Microsoft message queues (pros and cons). -
An Introduction to Linux IPC
An introduction to Linux IPC Michael Kerrisk © 2013 linux.conf.au 2013 http://man7.org/ Canberra, Australia [email protected] 2013-01-30 http://lwn.net/ [email protected] man7 .org 1 Goal ● Limited time! ● Get a flavor of main IPC methods man7 .org 2 Me ● Programming on UNIX & Linux since 1987 ● Linux man-pages maintainer ● http://www.kernel.org/doc/man-pages/ ● Kernel + glibc API ● Author of: Further info: http://man7.org/tlpi/ man7 .org 3 You ● Can read a bit of C ● Have a passing familiarity with common syscalls ● fork(), open(), read(), write() man7 .org 4 There’s a lot of IPC ● Pipes ● Shared memory mappings ● FIFOs ● File vs Anonymous ● Cross-memory attach ● Pseudoterminals ● proc_vm_readv() / proc_vm_writev() ● Sockets ● Signals ● Stream vs Datagram (vs Seq. packet) ● Standard, Realtime ● UNIX vs Internet domain ● Eventfd ● POSIX message queues ● Futexes ● POSIX shared memory ● Record locks ● ● POSIX semaphores File locks ● ● Named, Unnamed Mutexes ● System V message queues ● Condition variables ● System V shared memory ● Barriers ● ● System V semaphores Read-write locks man7 .org 5 It helps to classify ● Pipes ● Shared memory mappings ● FIFOs ● File vs Anonymous ● Cross-memory attach ● Pseudoterminals ● proc_vm_readv() / proc_vm_writev() ● Sockets ● Signals ● Stream vs Datagram (vs Seq. packet) ● Standard, Realtime ● UNIX vs Internet domain ● Eventfd ● POSIX message queues ● Futexes ● POSIX shared memory ● Record locks ● ● POSIX semaphores File locks ● ● Named, Unnamed Mutexes ● System V message queues ● Condition variables ● System V shared memory ● Barriers ● ● System V semaphores Read-write locks man7 .org 6 It helps to classify ● Pipes ● Shared memory mappings ● FIFOs ● File vs Anonymous ● Cross-memoryn attach ● Pseudoterminals tio a ● proc_vm_readv() / proc_vm_writev() ● Sockets ic n ● Signals ● Stream vs Datagram (vs uSeq. -

Message Passing Model
Message Passing Model Giuseppe Anastasi [email protected] Pervasive Computing & Networking Lab. (PerLab) Dept. of Information Engineering, University of Pisa PerLab Based on original slides by Silberschatz, Galvin and Gagne Overview PerLab Message Passing Model Addressing Synchronization Example of IPC systems Message Passing Model 2 Operating Systems Objectives PerLab To introduce an alternative solution (to shared memory) for process cooperation To show pros and cons of message passing vs. shared memory To show some examples of message-based communication systems Message Passing Model 3 Operating Systems Inter-Process Communication (IPC) PerLab Message system – processes communicate with each other without resorting to shared variables. IPC facility provides two operations: send (message ) – fixed or variable message size receive (message ) If P and Q wish to communicate, they need to: establish a communication link between them exchange messages via send/receive The communication link is provided by the OS Message Passing Model 4 Operating Systems Implementation Issues PerLab Physical implementation Single-processor system Shared memory Multi-processor systems Hardware bus Distributed systems Networking System + Communication networks Message Passing Model 5 Operating Systems Implementation Issues PerLab Logical properties Can a link be associated with more than two processes? How many links can there be between every pair of communicating processes? What is the capacity of a link? Is the size of a message that the link can accommodate fixed or variable? Is a link unidirectional or bi-directional? Message Passing Model 6 Operating Systems Implementation Issues PerLab Other Aspects Addressing Synchronization Buffering Message Passing Model 7 Operating Systems Overview PerLab Message Passing Model Addressing Synchronization Example of IPC systems Message Passing Model 8 Operating Systems Direct Addressing PerLab Processes must name each other explicitly. -
Message Passing
COS 318: Operating Systems Message Passing Jaswinder Pal Singh Computer Science Department Princeton University (http://www.cs.princeton.edu/courses/cos318/) Sending A Message Within A Computer Across A Network P1 P2 Send() Recv() Send() Recv() Network OS Kernel OS OS COS461 2 Synchronous Message Passing (Within A System) Synchronous send: u Call send system call with M u send system call: l No buffer in kernel: block send( M ) recv( M ) l Copy M to kernel buffer Synchronous recv: u Call recv system call M u recv system call: l No M in kernel: block l Copy to user buffer How to manage kernel buffer? 3 API Issues u Message S l Buffer (addr) and size l Message type, buffer and size u Destination or source send(dest, msg) R l Direct address: node Id, process Id l Indirect address: mailbox, socket, recv(src, msg) channel, … 4 Direct Addressing Example Producer(){ Consumer(){ ... ... while (1) { for (i=0; i<N; i++) produce item; send(Producer, credit); recv(Consumer, &credit); while (1) { send(Consumer, item); recv(Producer, &item); } send(Producer, credit); } consume item; } } u Does this work? u Would it work with multiple producers and 1 consumer? u Would it work with 1 producer and multiple consumers? u What about multiple producers and multiple consumers? 5 Indirect Addressing Example Producer(){ Consumer(){ ... ... while (1) { for (i=0; i<N; i++) produce item; send(prodMbox, credit); recv(prodMbox, &credit); while (1) { send(consMbox, item); recv(consMbox, &item); } send(prodMbox, credit); } consume item; } } u Would it work with multiple producers and 1 consumer? u Would it work with 1 producer and multiple consumers? u What about multiple producers and multiple consumers? 6 Indirect Communication u Names l mailbox, socket, channel, … u Properties l Some allow one-to-one mbox (e.g. -
IPC: Mmap and Pipes
Interprocess Communication: Memory mapped files and pipes CS 241 April 4, 2014 University of Illinois 1 Shared Memory Private Private address OS address address space space space Shared Process A segment Process B Processes request the segment OS maintains the segment Processes can attach/detach the segment 2 Shared Memory Private Private Private address address space OS address address space space space Shared Process A segment Process B Can mark segment for deletion on last detach 3 Shared Memory example /* make the key: */ if ((key = ftok(”shmdemo.c", 'R')) == -1) { perror("ftok"); exit(1); } /* connect to (and possibly create) the segment: */ if ((shmid = shmget(key, SHM_SIZE, 0644 | IPC_CREAT)) == -1) { perror("shmget"); exit(1); } /* attach to the segment to get a pointer to it: */ data = shmat(shmid, (void *)0, 0); if (data == (char *)(-1)) { perror("shmat"); exit(1); } 4 Shared Memory example /* read or modify the segment, based on the command line: */ if (argc == 2) { printf("writing to segment: \"%s\"\n", argv[1]); strncpy(data, argv[1], SHM_SIZE); } else printf("segment contains: \"%s\"\n", data); /* detach from the segment: */ if (shmdt(data) == -1) { perror("shmdt"); exit(1); } return 0; } Run demo 5 Memory Mapped Files Memory-mapped file I/O • Map a disk block to a page in memory • Allows file I/O to be treated as routine memory access Use • File is initially read using demand paging ! i.e., loaded from disk to memory only at the moment it’s needed • When needed, a page-sized portion of the file is read from the file system -

Interprocess Communication
06 0430 CH05 5/22/01 10:22 AM Page 95 5 Interprocess Communication CHAPTER 3,“PROCESSES,” DISCUSSED THE CREATION OF PROCESSES and showed how one process can obtain the exit status of a child process.That’s the simplest form of communication between two processes, but it’s by no means the most powerful.The mechanisms of Chapter 3 don’t provide any way for the parent to communicate with the child except via command-line arguments and environment variables, nor any way for the child to communicate with the parent except via the child’s exit status. None of these mechanisms provides any means for communicating with the child process while it is actually running, nor do these mechanisms allow communication with a process outside the parent-child relationship. This chapter describes means for interprocess communication that circumvent these limitations.We will present various ways for communicating between parents and chil- dren, between “unrelated” processes, and even between processes on different machines. Interprocess communication (IPC) is the transfer of data among processes. For example, a Web browser may request a Web page from a Web server, which then sends HTML data.This transfer of data usually uses sockets in a telephone-like connection. In another example, you may want to print the filenames in a directory using a command such as ls | lpr.The shell creates an ls process and a separate lpr process, connecting 06 0430 CH05 5/22/01 10:22 AM Page 96 96 Chapter 5 Interprocess Communication the two with a pipe, represented by the “|” symbol.A pipe permits one-way commu- nication between two related processes.The ls process writes data into the pipe, and the lpr process reads data from the pipe. -
Interprocess Communications (Pipes)
Multiple methods for Interprocess Communications Three examples: files, pipes, shared memory. In this figure, Local domain sockets would be conceptually similar to a named pipe. The second method refers to pipes Sources for these slides include: • W. Stevens, Unix Network Programming, Volumes 1 and 2 • M. Mitchell, J. Oldham, A. Samuel, Advanced Linux Programming 1 Interprocess Communication (IPC) ⚫ Linux supports the following IPC mechanisms: – Half duplex pipes – Full duplex pipes –only by using 2 pipes (other unix systems do support FD over a single pipe) – FIFOS (also called named pipes) – SYSV style message queues – SYSV style shared memory – Local Domain (UNIX Domain) sockets – Similar to a socket but modifications to the address/name aspect. (PF_LOCAL rather than PF_INET). – Sockets: Two processes can communicate using localhost. But it’s more efficient to use 2 pipes or local domain sockets. Pipe – used in a shell pipeline ⚫ Example of a pipeline - issue the following in a shell: – who | sort | wc 2 10 110 – The shell program creates three processes, two pipes are used as shown below. – The shell would use the dup2 call to duplicate the read end of each pipe to standard input and the write end to standard output. ⚫ int fd[2]; ⚫ pid_t pid; ⚫ pipe(fd); ⚫ pid = fork(); ⚫ If(pid == 0) { – dup2(fd[0], STDIN_FILENO); – exec(whatever); ⚫ } ⚫ The use of dup2 by a shell allows a program or filter to simply operate on data arriving through standard in….and sends output to standard out. It does not need to know the pipe descriptors involved…. 3 – Note – modified the pipeline- the figure assumes lp instead of wc . -

Interacting Modelica Using a Named Pipe for Hardware-In-The-Loop Simulation
Interacting Modelica using a Named Pipe for Hardware-in-the-loop Simulation Interacting Modelica using a Named Pipe for Hardware-in-the-loop Simulation Arno Ebner Anton Haumer Dragan Simic Franz Pirker Arsenal Research Giefinggasse 2, 1210 Vienna, Austria phone: +43 50550 6663, fax: +43 50550 6595, e-mail: [email protected] Abstract tion for the system model considering the initial val- ues. The paper presents a concept and an implementation In some cases the user or other applications have to of Modelica simulation interaction using the operat- interact with the simulation, for example to: ing system inter-process communication method of • Start or interrupt the simulation the Named Pipe. The main aim of this presented • Change parameters or variables during the simu- work is to implement a hardware-in-the-loop simula- lation tion (HILS) environment based on Dymola which • Communicate with other applications, for exam- runs on a normal Microsoft Windows Personal Com- ple with another simulation environment puter. • Exchange data with an input/output-card or a pe- An energy storage test bench is connected by an ana- ripheral communication interface logue and digital data input/output card with the Dy- • Build up a hardware-in-the-loop simulation envi- mola simulation computer. With this proposed sys- ronment tem, particularly long-time simulations with sample rates up to 30 Hz can be executed very cost effective. Hardware-in-the-loop (HIL) is the integration of real Typical applications are simulations of drive cycles components and system models in a common simu- to test energy storage systems in electrified vehicles lation environment [1]. -
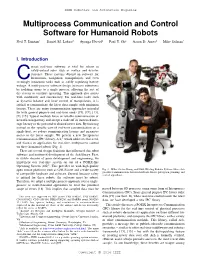
Multiprocess Communication and Control Software for Humanoid Robots Neil T
IEEE Robotics and Automation Magazine Multiprocess Communication and Control Software for Humanoid Robots Neil T. Dantam∗ Daniel M. Lofaroy Ayonga Hereidx Paul Y. Ohz Aaron D. Amesx Mike Stilman∗ I. Introduction orrect real-time software is vital for robots in safety-critical roles such as service and disaster response. These systems depend on software for Clocomotion, navigation, manipulation, and even seemingly innocuous tasks such as safely regulating battery voltage. A multi-process software design increases robustness by isolating errors to a single process, allowing the rest of the system to continue operating. This approach also assists with modularity and concurrency. For real-time tasks such as dynamic balance and force control of manipulators, it is critical to communicate the latest data sample with minimum latency. There are many communication approaches intended for both general purpose and real-time needs [19], [17], [13], [9], [15]. Typical methods focus on reliable communication or network-transparency and accept a trade-off of increased mes- sage latency or the potential to discard newer data. By focusing instead on the specific case of real-time communication on a single host, we reduce communication latency and guarantee access to the latest sample. We present a new Interprocess Communication (IPC) library, Ach,1 which addresses this need, and discuss its application for real-time, multiprocess control on three humanoid robots (Fig. 1). There are several design decisions that influenced this robot software and motivated development of the Ach library. First, to utilize decades of prior development and engineering, we implement our real-time system on top of a POSIX-like Operating System (OS)2. -

Message Passing
Message passing CS252 • Sending of messages under control of programmer – User-level/system level? Graduate Computer Architecture – Bulk transfers? Lecture 24 • How efficient is it to send and receive messages? – Speed of memory bus? First-level cache? Network Interface Design • Communication Model: Memory Consistency Models – Synchronous » Send completes after matching recv and source data sent » Receive completes after data transfer complete from matching send – Asynchronous Prof John D. Kubiatowicz » Send completes after send buffer may be reused http://www.cs.berkeley.edu/~kubitron/cs252 4/27/2009 cs252-S09, Lecture 24 2 Synchronous Message Passing Asynch. Message Passing: Optimistic Source Destination Source Destination (1) Initiate send Recv Psrc, local VA, len (1) Initiate send (2) Address translation on Psrc Send Pdest, local VA, len (2) Address translation (3) Local/remote check Send (P , local VA, len) (3) Local/remote check dest (4) Send-ready request Send-rdy req (4) Send data (5) Remote check for (5) Remote check for posted receive; on fail, Tag match allocate data buffer posted receive Wait Tag check Data-xfer req (assume success) Processor Allocate buffer Action? (6) Reply transaction Recv-rdy reply (7) Bulk data transfer Source VA Dest VA or ID Recv P , local VA, len Time src Data-xfer req Time • More powerful programming model • Constrained programming model. • Wildcard receive => non-deterministic • Deterministic! What happens when threads added? • Destination contention very limited. • Storage required within msg layer? • User/System boundary? 4/27/2009 cs252-S09, Lecture 24 3 4/27/2009 cs252-S09, Lecture 24 4 Asynch. Msg Passing: Conservative Features of Msg Passing Abstraction Destination • Source knows send data address, dest.