The Future of Time: Evolving Requirements for Precise Time Synchronization in the Electric Power Industry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Time-Synchronized Data Collection in Smart Grids Through Ipv6 Over
Time-synchronized Data Collection in Smart Grids through IPv6 over BLE Stanley Nwabuona Markus Schuss Simon Mayer Pro2Future GmbH Graz University of Technology Pro2Future GmbH and Graz Graz, Austria Graz, Austria University of Technology [email protected] [email protected] Graz, Austria [email protected] Konrad Diwold Lukas Krammer Alfred Einfalt Siemens Corporate Siemens Corporate Siemens Corporate Technology Technology Technology Vienna, Austria Vienna, Austria Vienna, Austria [email protected] [email protected] [email protected] ABSTRACT INTRODUCTION For the operation of electrical distribution system an increased Due to the progressing integration of distributed energy re- shift towards smart grid operation can be observed. This shift sources (such as domestic photovoltaics) into the distribution provides operators with a high level of reliability and efficiency grid [5], conventional – mostly passive – monitoring and con- when dealing with highly dynamic distribution grids. Techni- trol schemes of power systems are no longer applicable. This cally, this implies that the support for a bidirectional flow of is because these are not designed to handle and manage the data is critical to realizing smart grid operation, culminating in volatile and dynamic behavior stemming from these new active the demand for equipping grid entities (such as sensors) with grid entities. Therefore, advanced controlling and monitoring communication and processing capabilities. Unfortunately, schemes are required for distribution grid operation (i.e., in- the retrofitting of brown-field electric substations in distribu- cluding in Low-Voltage (LV) grids) to avoid system overload tion grids with these capabilities is not straightforward – this which could incur permanent damages. -

Ieee 802.1 for Homenet
IEEE802.org/1 IEEE 802.1 FOR HOMENET March 14, 2013 IEEE 802.1 for Homenet 2 Authors IEEE 802.1 for Homenet 3 IEEE 802.1 Task Groups • Interworking (IWK, Stephen Haddock) • Internetworking among 802 LANs, MANs and other wide area networks • Time Sensitive Networks (TSN, Michael David Johas Teener) • Formerly called Audio Video Bridging (AVB) Task Group • Time-synchronized low latency streaming services through IEEE 802 networks • Data Center Bridging (DCB, Pat Thaler) • Enhancements to existing 802.1 bridge specifications to satisfy the requirements of protocols and applications in the data center, e.g. • Security (Mick Seaman) • Maintenance (Glenn Parsons) IEEE 802.1 for Homenet 4 Basic Principles • MAC addresses are “identifier” addresses, not “location” addresses • This is a major Layer 2 value, not a defect! • Bridge forwarding is based on • Destination MAC • VLAN ID (VID) • Frame filtering for only forwarding to proper outbound ports(s) • Frame is forwarded to every port (except for reception port) within the frame's VLAN if it is not known where to send it • Filter (unnecessary) ports if it is known where to send the frame (e.g. frame is only forwarded towards the destination) • Quality of Service (QoS) is implemented after the forwarding decision based on • Priority • Drop Eligibility • Time IEEE 802.1 for Homenet 5 Data Plane Today • 802.1Q today is 802.Q-2011 (Revision 2013 is ongoing) • Note that if the year is not given in the name of the standard, then it refers to the latest revision, e.g. today 802.1Q = 802.1Q-2011 and 802.1D -

Implementing an IEEE 1588 V2 on I.MX RT Using Ptpd, Freertos, and Lwip TCP/IP Stack
NXP Semiconductors Document Number: AN12149 Application Note Rev. 1 , 09/2018 Implementing an IEEE 1588 V2 on i.MX RT Using PTPd, FreeRTOS, and lwIP TCP/IP stack 1. Introduction Contents This application note describes the implementation of 1. Introduction .........................................................................1 the IEEE 1588 V2 Precision Time Protocol (PTP) on 2. IEEE 1588 basic overview ..................................................2 2.1. Synchronization principle ........................................ 3 the i.MX RT MCUs running FreeRTOS OS. The IEEE 2.2. Timestamping ........................................................... 5 1588 standard provides accurate clock synchronization 3. IEEE 1588 functions on i.MX RT .......................................6 for distributed control nodes in industrial automation 3.1. Adjustable timer module .......................................... 6 3.2. Transmit timestamping ............................................. 8 applications. 3.3. Receive timestamping .............................................. 8 3.4. Time synchronization ............................................... 8 The implementation runs on the i.MX RT10xx 3.5. Input capture and output compare block .................. 8 Evaluation Kit (EVK) board with i.MX RT10xx MCUs. 4. IEEE 1588 implementation for i.MX RT ............................9 The demo software is based on the NXP MCUXpresso 4.1. Hardware components .............................................. 9 4.2. Software components ............................................ -

NIST Time and Frequency Services (NIST Special Publication 432)
Time & Freq Sp Publication A 2/13/02 5:24 PM Page 1 NIST Special Publication 432, 2002 Edition NIST Time and Frequency Services Michael A. Lombardi Time & Freq Sp Publication A 2/13/02 5:24 PM Page 2 Time & Freq Sp Publication A 4/22/03 1:32 PM Page 3 NIST Special Publication 432 (Minor text revisions made in April 2003) NIST Time and Frequency Services Michael A. Lombardi Time and Frequency Division Physics Laboratory (Supersedes NIST Special Publication 432, dated June 1991) January 2002 U.S. DEPARTMENT OF COMMERCE Donald L. Evans, Secretary TECHNOLOGY ADMINISTRATION Phillip J. Bond, Under Secretary for Technology NATIONAL INSTITUTE OF STANDARDS AND TECHNOLOGY Arden L. Bement, Jr., Director Time & Freq Sp Publication A 2/13/02 5:24 PM Page 4 Certain commercial entities, equipment, or materials may be identified in this document in order to describe an experimental procedure or concept adequately. Such identification is not intended to imply recommendation or endorsement by the National Institute of Standards and Technology, nor is it intended to imply that the entities, materials, or equipment are necessarily the best available for the purpose. NATIONAL INSTITUTE OF STANDARDS AND TECHNOLOGY SPECIAL PUBLICATION 432 (SUPERSEDES NIST SPECIAL PUBLICATION 432, DATED JUNE 1991) NATL. INST.STAND.TECHNOL. SPEC. PUBL. 432, 76 PAGES (JANUARY 2002) CODEN: NSPUE2 U.S. GOVERNMENT PRINTING OFFICE WASHINGTON: 2002 For sale by the Superintendent of Documents, U.S. Government Printing Office Website: bookstore.gpo.gov Phone: (202) 512-1800 Fax: (202) -
Kysync,Kyland Precision Clock Synchronization Solutions
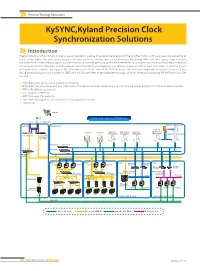
Precise Timing Solutions KySYNC,Kyland Precision Clock Synchronization Solutions Introduction Precision clock synchronization solutions are using external precise time reference to establish the synchronization with local clocks by delivering all kinds of time signal. The time source provides the time reference, and the time server distributes the timing. While the time source is not available, the time server’s time keeping ability will be critical to assure the precision of the time reference. So in a precision clock synchronization network, the precision of time reference, time distribution and time keeping are hook-ups and all plays important role in each time node. In order to ensure all legacy devices which only support IRIG-B format could still be synced, the PTP (Precision Time Protocol) signal will need to be converted into IRIG-B format through clock conversion. IEEE 1588 will also be need to be distributed through all kinds of network including PRP/HSR and also SDH network. Kyland provides turnkey timing solution including: High-precision time server and IEEE 1588 industrial Ethernet switches supporting IEEE 1588 in both power profile (C37.238) and telecom profile PTP to IRIG-B time conversion IEEE 1588 over PRP/HSR IEEE 1588 over SDH network TMS (Time Management System) & Service Management System Time tester Satellite KySYNC, Intelligent Gateway, PRP/HSR Solution E1/T1 GPS Antenna Remote Control Center KySYNC Station Level Protection Engineering Server A Sever B Operation Maintenance Operation Workstation Workstation Workstation -

Time Signal Stations 1By Michael A
122 Time Signal Stations 1By Michael A. Lombardi I occasionally talk to people who can’t believe that some radio stations exist solely to transmit accurate time. While they wouldn’t poke fun at the Weather Channel or even a radio station that plays nothing but Garth Brooks records (imagine that), people often make jokes about time signal stations. They’ll ask “Doesn’t the programming get a little boring?” or “How does the announcer stay awake?” There have even been parodies of time signal stations. A recent Internet spoof of WWV contained zingers like “we’ll be back with the time on WWV in just a minute, but first, here’s another minute”. An episode of the animated Power Puff Girls joined in the fun with a skit featuring a TV announcer named Sonny Dial who does promos for upcoming time announcements -- “Welcome to the Time Channel where we give you up-to- the-minute time, twenty-four hours a day. Up next, the current time!” Of course, after the laughter dies down, we all realize the importance of keeping accurate time. We live in the era of Internet FAQs [frequently asked questions], but the most frequently asked question in the real world is still “What time is it?” You might be surprised to learn that time signal stations have been answering this question for more than 100 years, making the transmission of time one of radio’s first applications, and still one of the most important. Today, you can buy inexpensive radio controlled clocks that never need to be set, and some of us wear them on our wrists. -

STANDARD FREQUENCIES and TIME SIGNALS (Question ITU-R 106/7) (1992-1994-1995) Rec
Rec. ITU-R TF.768-2 1 SYSTEMS FOR DISSEMINATION AND COMPARISON RECOMMENDATION ITU-R TF.768-2 STANDARD FREQUENCIES AND TIME SIGNALS (Question ITU-R 106/7) (1992-1994-1995) Rec. ITU-R TF.768-2 The ITU Radiocommunication Assembly, considering a) the continuing need in all parts of the world for readily available standard frequency and time reference signals that are internationally coordinated; b) the advantages offered by radio broadcasts of standard time and frequency signals in terms of wide coverage, ease and reliability of reception, achievable level of accuracy as received, and the wide availability of relatively inexpensive receiving equipment; c) that Article 33 of the Radio Regulations (RR) is considering the coordination of the establishment and operation of services of standard-frequency and time-signal dissemination on a worldwide basis; d) that a number of stations are now regularly emitting standard frequencies and time signals in the bands allocated by this Conference and that additional stations provide similar services using other frequency bands; e) that these services operate in accordance with Recommendation ITU-R TF.460 which establishes the internationally coordinated UTC time system; f) that other broadcasts exist which, although designed primarily for other functions such as navigation or communications, emit highly stabilized carrier frequencies and/or precise time signals that can be very useful in time and frequency applications, recommends 1 that, for applications requiring stable and accurate time and frequency reference signals that are traceable to the internationally coordinated UTC system, serious consideration be given to the use of one or more of the broadcast services listed and described in Annex 1; 2 that administrations responsible for the various broadcast services included in Annex 2 make every effort to update the information given whenever changes occur. -

What Time I T
Does Anybody Really What Time It Is? 24/7/365, Here's How Time Got On Your Best Side By Michael A. Lombardi ccasionally I'll talk to people who known to most radio buffs. He used a can't believe that some radio sta- spark-gap transmitter to successfully 0tions exist solely to transmit accu- send radio signals over a distance of more rate time. While they wouldn't poke fun than one mile in 1895. By 1899 he had at the Weather Channel or even a radio transmitted signals across the English station that plays nothing but Garth Channel, and sent signals across the Brooks records (imagine that), people Atlantic Ocean in 1901. often make jokes about time signal sta- Surprisingly, in the midst of Marconi's tions. They'll ask "Doesn't the program- early work, before any radio stations exist- ming get a little boring?'or "How does ed, or before the public even completely the announcer stay awake?'There have believed his results, a proposal was made even been parodies of time signal sta- to use the new wireless medium to broad- tions. A recent Internet spoof of WWV cast time. In November 1898. an optical containedzingers like "we'll be back with instrument maker and inventor named Sir the time on WWV in just a minute, but Howard Grubb addressed the Royal first, here's another minute." Dublin Society and proposed the concept An episode of the animated Powerpuff of a radio controlled clock. After many Girls joined in the fun with a skit featur- years of working with astronomical obser- ing a TV announcer named Sonnv Dial L, vatories. -

Time and Frequency Users' Manual
,>'.)*• r>rJfl HKra mitt* >\ « i If I * I IT I . Ip I * .aference nbs Publi- cations / % ^m \ NBS TECHNICAL NOTE 695 U.S. DEPARTMENT OF COMMERCE/National Bureau of Standards Time and Frequency Users' Manual 100 .U5753 No. 695 1977 NATIONAL BUREAU OF STANDARDS 1 The National Bureau of Standards was established by an act of Congress March 3, 1901. The Bureau's overall goal is to strengthen and advance the Nation's science and technology and facilitate their effective application for public benefit To this end, the Bureau conducts research and provides: (1) a basis for the Nation's physical measurement system, (2) scientific and technological services for industry and government, a technical (3) basis for equity in trade, and (4) technical services to pro- mote public safety. The Bureau consists of the Institute for Basic Standards, the Institute for Materials Research the Institute for Applied Technology, the Institute for Computer Sciences and Technology, the Office for Information Programs, and the Office of Experimental Technology Incentives Program. THE INSTITUTE FOR BASIC STANDARDS provides the central basis within the United States of a complete and consist- ent system of physical measurement; coordinates that system with measurement systems of other nations; and furnishes essen- tial services leading to accurate and uniform physical measurements throughout the Nation's scientific community, industry, and commerce. The Institute consists of the Office of Measurement Services, and the following center and divisions: Applied Mathematics -

Timing Needs in Cable Networks
Timing Needs in Cable Networks Yair Neugeboren Director System Architecture, Network and Cloud, ARRIS ITSF 2017 Outline • What is a Cable Network? • Timing Aspects in Cable • Distributed Architecture and Timing Requirements • Mobile Backhaul Support through Cable Networks Copyright 2017 – ARRIS Enterprises, LLC. All rights reserved 09 October 2017 2 Outline • What is a Cable Network? • Timing Aspects in Cable • Distributed Architecture and Timing Requirements • Mobile Backhaul Support through Cable Networks Copyright 2017 – ARRIS Enterprises, LLC. All rights reserved 09 October 2017 3 Cable Services Delivery - Today Commercial Residential Web Surf + OTT Video Voice Data Video Video Digital Analog Telephone Services Services Conferencing On Demand Television Television Gaming HFC Channelized Network Downstream [MHz] Copyright 2017 – ARRIS Enterprises, LLC. All rights reserved 09 October 2017 5 What is DOCSIS? The cable TV industry came together in the late 90’s and set up a group called CableLabs They created a set of specifications called Data Over Cable Service Interface Specifications, or DOCSIS for short DOCSIS defines the electrical and logical interfaces specification for network and RF elements in a cable network DOCSIS is a Point to Multipoint Protocol Downstream is continuous “One to Many” Upstream is dynamically scheduled BW allocation DOCSIS versions are 1.0, 1.1, 2.0, 3.0 and 3.1 Copyright 2017 – ARRIS Enterprises, LLC. All rights reserved 09 October 2017 6 Customer Assurance Lawful Cable Network TopologyRecord / Billing Systems Enforcement Back Office Northbound API The HFC network provides the communications link between the CMTS/CCAP and the stations, STBs, CMs and eMTAs. SDN Controller Abstrac on & Applica on HFC plant consists of up to ~160 km of optical fiber, fewLogi chundred meters of coaxial cable, RF distributions and Amplifiers. -
Time and Frequency Users Manual
A 11 10 3 07512T o NBS SPECIAL PUBLICATION 559 J U.S. DEPARTMENT OF COMMERCE / National Bureau of Standards Time and Frequency Users' Manual NATIONAL BUREAU OF STANDARDS The National Bureau of Standards' was established by an act of Congress on March 3, 1901. The Bureau's overall goal is to strengthen and advance the Nation's science and technology and facilitate their effective application for public benefit. To this end, the Bureau conducts research and provides: (1) a basis for the Nation's physical measurement system, (2) scientific and technological services for industry and government, (3) a technical basis for equity in trade, and (4) technical services to promote public safety. The Bureau's technical work is per- formed by the National Measurement Laboratory, the National Engineering Laboratory, and the Institute for Computer Sciences and Technology THE NATIONAL MEASUREMENT LABORATORY provides the national system of physical and chemical and materials measurement; coordinates the system with measurement systems of other nations and furnishes essential services leading to accurate and uniform physical and chemical measurement throughout the Nation's scientific community, industry, and commerce; conducts materials research leading to improved methods of measurement, standards, and data on the properties of materials needed by industry, commerce, educational institutions, and Government; provides advisory and research services to other Government agencies; develops, produces, and distributes Standard Reference Materials; and provides -
Synchronization Requirements in Cellular Networks Over Ethernet
Synchronization Requirements in Cellular Networks over Ethernet IEEE 802.3 TS Interim, May. 2009 J. Kevin Rhee 1, Kyusang Lee 2, and Seung-Hwan Kim 3 1 KAIST, 2 ACTUS Networks, and 3 ETRI, S. Korea Acknowledgment • ChanKyun Lee, KAIST • SeongJin Lim, KAIST Mobile Cellular Network: WiMAXWiMAX/EV/EV/EV/EV----DODODODO PSTN/PLMN AAA Authentication, Authorization and Accounting ACR Access Control Router AR Access Router BR Broader Router PSN GSN GPRS Support Node Internet HA Home Agent IMS IP Multimedia Sub-system BR Home PSDN Packet Data Serving Node NodeB RAS Radio Access Station Gateway AAA GSN/PSDN Femtocell CN Femto ACR ACR NodeB/BTS RNC/BSC 3G RAN RAS 3G MS RAS CDMA EV-DO Femtocell WiMAX Wireless backhaul • Wireless backhaul network connects wireless base stations to the corresponding BSC • It delivers the expected bandwidth requirements of new technologies such as WiMAX, 3G, and 4G. • PSN and TDM can be used for wireless backhaul network Backhaul Cell Site Medium Aggregation Site RNC/BSC TDM TDM TDM/SONET/SDH ATM TDM/ SONET/SDH Ethernet FR/HDLC Ethernet CSAG Ethernet/DSL/PON Ethernet Multiservice SGSN BS Edge Router Radio Bearer Backhaul RNC/BSC Interface Technology Medium SGSN Interface Wireless Backhaul Network BSC: Base Station Controller PSN: Packet Switched Network Backhaul Market Growth • 3G and 4G is driving 25-40% a year growth in mobile backhaul traffic • The Carrier Ethernet markets are expected to increase 76% by 2011 • Data oriented mobile traffic is increasing • Legacy TDM-based system is being replaced packet-based Ethernet