Lunar Surface Exploration
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

How Can Retroreflective Clothing Provide More Safety Through Visibility in a Semi-Dark Urban Environment? a Study Taking Plac
MASTER’S THESIS How can retroreflective clothing BY VIOLA SCHMITZ provide more safety through visibility in a semi-dark urban Royal Institute of Technology environment? KTH School of Architecture Master’s Program in A study taking place in Scandinavia. Architectural Lighting Design 2018-2019 24.05.2019 AF270X VT19-1 Tutor: Foteini Kyriakidou 0 Index Abstract P. 2 1. Introduction P. 2 2. Background P. 3 2.1. Urban Background P. 4 2.2. Biological background P. 4 2.2.1. Reflexes and reactions P. 4 2.2.2. Types of vision P. 4 2.2.3. Effect of pattern P. 5 recognition 2.2.4. Human field of vision P. 5 3. Analysis P. 6 3.1. Analysis: Retroreflectors P. 6 3.2. Analysis: Existing products P. 7 4. Methodology P. 9 5. Methods P. 10 5.1. Survey: P. 10 Lines defining the human body 5.2. Video Experiment: P. 10 Designs in motion 5.2.1. Analysis: Location P. 10 5.2.2. Video Experiment P. 11 5.2.3. Procedure P. 12 5.3. Experimental survey: P. 12 Size of a human 5.4. Visualization: P. 13 Pattern recognition in surroundings 6. Results P. 14 6.1. Survey: P. 14 Lines defining the human body 6.2. Video Experiment: P. 15 Designs in motion 6.2.1. Analysis: Location P. 15 6.2.2. Video Experiment P. 16 6.2.3. Observation P. 17 6.3. Experimental survey: P. 17 Size of a human 6.4. Visualization: Pattern P. 17 recognition in surroundings 7. Discussion P. -

Brown Paper Goods Company 2016 STOCK PRODUCT CATALOG
Page 1 Brown Paper Goods Company 2016 STOCK PRODUCT CATALOG Manufacturers of Specialty Bags & Sheets for the Food Service Industry Since 1918 3530 Birchwood Drive Waukegan, IL 60085-8334 Phone (800) 323-9099 Fax (847) 688-1458 www.brownpapergoods.com BROWN PAPER GOODS CATALOG 2015 Page 2 CONTENTS 2 CONTENTS GENERAL INFORMATION 3 TERMS AND CONDITIONS PAN LINER 4 BAKING PAN LINERS 5 PLAIN WRAPS FLAT WRAP 6 PRINTED WRAPS 7 FOIL WRAPS INTERFOLD 8 INTERFOLDED SHEETS 9 POPCORN BAGS 10 PIZZA BAGS 11 HOT DOG AND SUB BAGS BAGS - FAST FOOD 12 FOIL HOT DOG AND SANDWICH BAGS 13 FRENCH FRY BAGS 14 PLAIN SANDWICH BAGS 15 PRINTED SANDWICH BAGS 16 WHITE MG & WAXED BREAD BAGS BAGS - BAKERY BREAD 17 PRINTED BREAD BAGS 18 NATURAL PANEL BAGS 19 WAXSEAL AUTOMATIC BAKERY BAGS BAGS - S.O.S AUTOMATIC STYLE 20 CARRY OUT SACKS & SCHOOL LUNCH BAGS BAGS - COFFEE / CANDY 21 COFFEE / CANDY DUPLEX AUTOMATIC BAGS BAGS - DELI DUPLEX CARRY-OUT 22 A LA CARTE CARRY-OUT DELI BAGS 23 STEAK PAPER DISPLAY SHEETS 24 STEAK PAPER ROLLS 25 WHITE BUTCHER & TABLE COVER ROLLS ROLLS AND DELI SHEETS 26 FREEZER ROLLS 27 PATTY PAPERS - BUTCHER SHEETS 28 NATURAL BUTCHER, & MARKET ROLLS 29 DOGGIE - CANDY BAGS - GIBLET BAGS TABLE TOP - HOSPITALITY - GIBLET 30 NAPKIN RING BANDS 31 SILVERWARE BAGS - JAN SAN - HOSPITALITY ITEMS 32 GLASSINE BAGS GLASSINE & CELLOPHANE 33 CELLOPHANE BAGS & SHEETS PRODUCE BAGS 34 POLY MESH PRODUCE HARVEST BAGS 35 CATEGORY INDEX INDICES 36 NUMERICAL INDEX A 37 NUMERICAL INDEX B Brown Paper Goods Company 3530 Birchwood Drive Waukegan, IL 60085 (800) 323-9099 www.brownpapergoods.com Page 3 BROWN PAPER GOODS TERMS & CONDITIONS Terms of Sale Freight Full freight allowed on combined shipments of 1,000 pounds or more to all states except Alaska and Hawaii. -

Carryout Thermal Rebags
In Stock Packaging TM reBag A series of reusable shopping bags. Wine Carrier Bags Thermal Bag Custom Design Bags Easy to Assemble Display Fixture reBag TM Every Day reBag 531277851 12.75x8.5x13.25x8.5 NWPP Bag 80 Gram reBag,2CF/2CB,Pack=50 532942374 12.75x8.5x13.25x8.5 NWPP Bag 75 Gram reBag,1CF/1CB,Pack=50 Thermal reBag 535399360 13x8x14x8 NWPP Thermal Bag 70 Gram reBag,2CF/2CB,Pack=25 Wine Carrier reBag 533584710 7x3.5x11x3.5 NWPP Wine Bag, 2 Bottle Premium,2CF/2CB,Pack=50 534689992 10x3.5x11x3.5 NWPP Wine Bag, 3 Bottle Premium,2CF/2CB,Pack=50 532537257 10x6.5x11x6.5 NWPP Wine Bag, 6 Bottle Premium,2CF/2CB,Pack=50 Frequently asked questions How do I keep my reBag clean? What stock film colors are about reBags You can hand wash reBags with water and available? Stock film colors are green, a mild soap, as needed. Since the material black, blue and tan. For custom film colors When will I have to replace used to make reBags is water and stain any PMS color can be utilized. my reBags? The reBags should easily resistant, they are very easy to keep clean. last 2 years with weekly use. A simple quick rinse in the kitchen sink is What is the minimum order for all that is needed. The bags will air dry custom printed bags utilizing a How much will the reBag hold? quickly, do not put reBags in the dryer. custom film color? The minimum order Our bags can hold up to 30-35 pounds. -
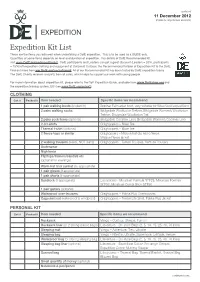
Doe Expedition Kit List
updated 11 December 2012 (replaces all previous versions) EXPEDITION Expedition Kit List These are the items you will need when undertaking a DofE expedition. This is to be used as a GUIDE only. Quantities of some items depends on level and duration of expedition. For details of DofE Recommended Kit, visit www.DofE.org/go/expeditionkit. DofE participants and Leaders can get a great discount (Leaders = 20%, participants = 15%) off expedition clothing and equipment at Cotswold Outdoor, the Recommended Retailer of Expedition Kit to the DofE. Find out more from ww.DofE.org/go/cotswold All of our Recommended Kit has been tested by DofE expedition teams. The DofE Charity receives a royalty from all sales, which helps to support our work with young people. For more information about expedition kit, please refer to the DoE Expedition Guide, available from www.DofEshop.org and the expedition training system, EX2 (see www.DofE.org/go/ex2) CLOTHING Got it Packed it Item needed Specific items we recommend 1 pair walking boots (broken in) Brasher Fellmaster boot, very suitable for Silver/Gold expeditions 2 pairs walking socks Bridgedale Woolfusion Trekker, Bridgedale Women’s Woolfusion Trekker, Bridgedale Woolfusion Trail 2 pairs sock liners (optional) Bridgedale Coolmax Liner, Bridgedale Women’s Coolmax Liner 2-3 t-shirts Craghoppers – Base Tee Thermal t-shirt (optional) Craghoppers – Base Tee 2 fleece tops or similar Craghoppers – Mission half-zip micro fleece, Mission Fleece jacket 2 walking trousers (warm, NOT jeans) Craghoppers – Terrain Trousers, -

Expedition Kit List
updated 4 September 2013 (replaces all previous versions) EXPEDITION KIT LIST This list is an illustration of the All DofE participants and Leaders can with other retailers and it is in stock, we will type of items you may need when get a great discount (Leaders = 20%, match the price or refund the difference.* undertaking a DofE Expedition. This participants = 15%) off expedition Find out more about this discount from list is to be used as a GUIDE only clothing and equipment (online and www.DofE.org/go/cotswoldoutdoor. and there is no obligation to buy the in stores) at Cotswold Outdoor, the specific items we recommend. Recommended Retailer of Expedition Kit All of our Recommended Kit has been to the DofE. tested by DofE expedition teams. Quantities of some items depends on level and duration of expedition. Cotswold Outdoor statement: Price The DofE Charity receives a royalty from all For details of DofE Recommended Kit, match... We are determined to give you a sales of Recommended Kit items, which helps visit www.DofE.org/go/exk. fair deal. If you find a product we sell for less to support our work with young people. CLOTHING Got it Packed it Item needed Specific items we recommend 1 pair walking boots (broken in) Brasher Fellmaster boot, very suitable for Silver/Gold expeditions 2 pairs walking socks Bridgedale Woolfusion Trekker, Bridgedale Women’s Woolfusion Trekker, Bridgedale Woolfusion Trail 2 pairs sock liners (optional) Bridgedale Coolmax Liner, Bridgedale Women’s Coolmax Liner 2-3 t-shirts Craghoppers – Base Tee Thermal t-shirt -
ALSEP Termination Report
NASA Reference Publication 1036 ALSEP Termination Report R. W. W. James Bates, Lauderdale, I� and Harold Kernaghan APRIL 1979 Nl\5/\ NASA Reference Publication 1036 ALSEP Termination Report R. James Bates Lyndon B. Johnson Space Center, Houston, Texas W. W. Lauderdale General Electric Company, Houston, Texas Harold Kernaghan Kentron International, Inc., Houston, Texas N/\5/\National Aeronautics and Space Administration Scientific and Technical Information Office 1979 I l r FOREWORD Th is report summarizes the Apollo Lunar Surface Experiments Package 1ALSEP) operations and provides background information for studies in lunar cience . The report was prepared when the receipt of data from the lunar �urff ace was terminated on September 30, 1977; it is intended as an overview !f the ALSEP activities, and specific details relative to ALSEP scientific ata are outside the scope of information presented here. The ALSEP data or scientific analysis requi rements can be obtained from the National Space �cience Data Center (NSSDC), Code 601.4, Goddard Space Flight Center, Green relt, Maryland 20771. Details regarding the placing of ALSEP stations on the lunar surface �av�· e been covered thoroughly in many publications; such information will not · e presented here. Documentation on the ALSEP desi gn, development, and oper tions are archi ved at the Lyndon B. Johnson Space Center and at other NASA enters. iii. CONTENTS Section Page 1. INTRODUCTION 1-1 ALSEP LOCATIONS AND START TIMES • 1-1 PROGRA M IN FORMATION SUMMARY 1-4 ALSEP CONFIGURATIONS 1-5 -

Next-Generation Laser Retroreflectors for Precision Tests of General
UNIVERSITA` DEGLI STUDI “ROMA TRE” DOTTORATO DI RICERCA IN FISICA XXVIII CICLO Next-generation Laser Retroreflectors for Precision Tests of General Relativity Relazione sull’attivit`adi Dottorato di Manuele Martini Relatore Interno: Prof. Aldo Altamore Relatore Esterno: Dr. Simone Dell’Agnello, LNF-INFN Coordinatore: Prof. Roberto Raimondi Anno Accademico 2015/2016 Alla mia famiglia... Contents List of Acronyms v Preface vii Why this work at LNF-INFN . vii Whatmycontributionis ............................ viii Workinthefieldofoptics ........................ ix Industrial & quality assurance . ix Physics analysis . x 1 Satellite/Lunar Laser Ranging 1 1.1 The ILRS . 2 1.2 Howitworks ............................... 4 1.3 Corner Cube Retroreflectors . 6 1.3.1 Apollo & Lunokhod Corner Cube Retroreflector (CCR) . 8 2GeneralRelativitytests 11 2.1 TestsoriginallyproposedbyEinstein . 11 2.1.1 Mercury perihelion precession . 11 2.1.2 Deflection of light . 12 2.1.3 Gravitational redshift . 18 i 2.1.4 Shapirotimedelay ........................ 20 2.2 ParametrizedPost-Newtonianformalism . 20 3 The SCF Lab 23 3.1 SCF-GCryostat.............................. 25 3.2 Vacuum & Cryogenic System . 27 3.3 Control and acquisition electronics . 30 3.4 Solar Simulator . 33 3.5 IR Thermacam . 36 3.6 Optical layout . 40 3.6.1 Angularcalibration . 42 4 The MoonLIGHT-2 experiment 45 4.1 MoonLIGHT-ILN............................. 46 4.2 MoonLIGHT-2payload. 49 4.2.1 Optical modeling . 49 4.3 Structural design . 55 4.3.1 Sunshade vs sunshade-less . 58 4.3.2 Falcon-9 test . 61 4.3.3 Actual Moon Laser Instrumentation for General relativity High accuracyTests(MoonLIGHT)-2design . 65 4.4 INRRI................................... 65 5 The SCF-TEST 69 5.1 The MoonLIGHT-2 SCF-TESTs: general description . -

581 01 Linkgping INSUHUILUTOL Swedish Road and Traffic Research Institut
ISSN 0347-6030 V/]/rapport 323 A 1989 Visibility distances to retrore- flectors in opposing situations between two motor vehicles at night Gabriel Helmers and Sven - Olof Lundkvist an Vag-och Irafik- Statens vag- och trafikinstitut (VTI) * 581 01 LinkGping E INSUHUILUTOL swedish Road and Traffic Research Institute « $-581 01 Linkoping Sweden l/TIra A 1.989 Visibility distances to retrore- flectors in apposing situations between two motor vehicles at night Gabriel Helmers and Sven - Olaf Lundkvist f 00/! Statens veg- och trafikinstitut (VT/l - 581 01 Lin/(oping 'lSt/tlltet Swedish Road and Traffic Research Institute - 8-581 07 Linképing Sweden PREFACE This report is a shortened English version of the original final report in Swedish (VTI rapport 323). The research work as well as the work on the translation into English were sponsored by The Swedish Transport Research Board. Christina Ruthger had the main responsibility for the translation and editing of the report. VTI REPORT 323A CONTENTS Page ABSTRACT SUMMARY II BACKGROUND AND PROBLEM Safe visibility distance H Visibility in vehicle lighting Design traffic situation for the evaluation of IIIHIII thl retroreflectors and other visibility promoting measures ISSUES N METHOD Method for the measurement of visibility distances Experimental design Retroreflectors in the experiment Test design Headlights Low beam aiming Subjects NNNNNNNH Model of the analysis of variance wwwwwwwww 03014:.me RESULTS Large retroreflectors Small retroreflectors NNH bub-bub Analysis of variance concerning SMALL -

Apollo Space Suit
APOLLO SPACE S UIT 1962–1974 Frederica, Delaware A HISTORIC MECHANICAL ENGINEERING LANDMARK SEPTEMBER 20, 2013 DelMarVa Subsection Histor y of the Apollo Space Suit This model would be used on Apollo 7 through Apollo 14 including the first lunar mission of Neil Armstrong and Buzz International Latex Corporation (ILC) was founded in Aldrin on Apollo 11. Further design improvements were made to Dover, Delaware in 1937 by Abram Nathanial Spanel. Mr. Spanel improve mobility for astronauts on Apollo 15 through 17 who was an inventor who became proficient at dipping latex material needed to sit in the lunar rovers and perform more advanced to form bathing caps and other commercial products. He became mobility exercises on the lunar surface. This suit was known as famous for ladies apparel made under the brand name of Playtex the model A7LB. A slightly modified ILC Apollo suit would also go that today is known worldwide. Throughout WWII, Spanel drove on to support the Skylab program and finally the American-Soyuz the development and manufacture of military rubberized products Test Program (ASTP) which concluded in 1975. During the entire to help our troops. In 1947, Spanel used the small group known time the Apollo suit was produced, manufacturing was performed as the Metals Division to develop military products including at both the ILC plant on Pear Street in Dover, Delaware, as well as several popular pressure helmets for the U.S. Air Force. the ILC facility in Frederica, Delaware. In 1975, the Dover facility Based upon the success of the pressure helmets, the Metals was closed and all operations were moved to the Frederica plant. -

Motorcycle Crash Causation Study: Volume 2—Coding Manual
Motorcycle Crash Causation Study: Volume 2—Coding Manual PUBLICATION NO. FHWA-HRT-18-039 FEBRUARY 2019 Research, Development, and Technology Turner-Fairbank Highway Research Center 6300 Georgetown Pike McLean, VA 22101-2296 FOREWORD The Motorcycle Crash Causation Study, conducted through the Federal Highway Administration Office of Safety Research and Development, produced a wealth of information on the causal factors for motorcycle crashes, and its corresponding Volumes provide perspectives on what crash-countermeasure opportunities can be developed. This study used a crash- and control-case approach developed from the Organisation for Economic Cooperation and Development protocols, which as discussed in this report, has provided insights into more than 1,900 data elements that may be associated with motorcycle-crash causation. The research team produced a final report along with a 14-volume series of supplemental reports that provide an overview of the study and a summary of its observations, the data-collection forms and coding definitions, a tabulation of each data element collected from each form, and selected comparisons with previous studies. It is anticipated that readers will select those Volumes and data elements that provide information of specific interest. This document, Volume 2—Coding Manual, provides the coding conventions used in this study. It provides data that enable the proper interpretation and understanding of the codes assigned to variables of interest during the study. This report will be of interest to individuals involved in traffic safety, safety training, crash and injury reduction, and roadway design and policy making, as well as to motorcycle- and safety-equipment designers, crash investigators and researchers, motorcycle and automotive manufacturers and consumers, roadway users, and human-factors specialists. -
Pub Date Abstract
DOCUMENT RESUME ED 058 456 VT 014 597 TITLE Exploring in Aeronautics. An Introductionto Aeronautical Sciences. INSTITUTION National Aeronautics and SpaceAdministration, Cleveland, Ohio. Lewis Research Center. REPORT NO NASA-EP-89 PUB DATE 71 NOTE 398p. AVAILABLE FROMSuperintendent of Documents, U.S. GovernmettPrinting Office, Washington, D.C. 20402 (Stock No.3300-0395; NAS1.19;89, $3.50) EDRS PRICE MF-$0.65 HC-$13.16 DESCRIPTORS Aerospace Industry; *AerospaceTechnology; *Curriculum Guides; Illustrations;*Industrial Education; Instructional Materials;*Occupational Guidance; *Textbooks IDENTIFIERS *Aeronatics ABSTRACT This curriculum guide is based on a year oflectures and projects of a contemporary special-interestExplorer program intended to provide career guidance and motivationfor promising students interested in aerospace engineering and scientific professions. The adult-oriented program avoidstechnicality and rigorous mathematics and stresses real life involvementthrough project activity and teamwork. Teachers in high schoolsand colleges will find this a useful curriculum resource, w!th manytopics in various disciplines which can supplement regular courses.Curriculum committees, textbook writers and hobbyists will also findit relevant. The materials may be used at college level forintroductory courses, or modified for use withvocationally oriented high school student groups. Seventeen chapters are supplementedwith photographs, charts, and line drawings. A related document isavailable as VT 014 596. (CD) SCOPE OF INTEREST NOTICE The ERIC Facility has assigned this document for processing to tri In our judgement, thisdocument is also of interest to the clearing- houses noted to the right. Index- ing should reflect their special points of view. 4.* EXPLORING IN AERONAUTICS an introduction to Aeronautical Sciencesdeveloped at the NASA Lewis Research Center, Cleveland, Ohio. -

Temperature Measurement
mywbut.com 14 Temperature measurement 14.1 Principles of temperature measurement Temperature measurement is very important in all spheres of life and especially so in the process industries. However, it poses particular problems, since temperature measurement cannot be related to a fundamental standard of temperature in the same way that the measurement of other quantities can be related to the primary standards of mass, length and time. If two bodies of lengths l1 and l2 are connected together end to end, the result is a body of length l1 C l2.A similar relationship exists between separate masses and separate times. However, if two bodies at the same temperature are connected together, the joined body has the same temperature as each of the original bodies. This is a root cause of the fundamental difficulties that exist in establishing an absolute standard for temperature in the form of a relationship between it and other measurable quantities for which a primary standard unit exists. In the absence of such a relationship, it is necessary to establish fixed, reproducible reference points for temperature in the form of freezing and boiling points of substances where the transition between solid, liquid and gaseous states is sharply defined. The International Practical Temperature Scale (IPTS)Ł uses this philosophy and defines six primary fixed points for reference temperatures in terms of: ž the triple point of equilibrium hydrogen 259.34°C ž the boiling point of oxygen 182.962°C ž the boiling point of water 100.0°C ž the freezing point of zinc 419.58°C ž the freezing point of silver 961.93°C ž the freezing point of gold 1064.43°C (all at standard atmospheric pressure) The freezing points of certain other metals are also used as secondary fixed points to provide additional reference points during calibration procedures.