Bicycle Idler Drivetrain Analysis in Association With
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Flexible Wheel Chair
GRD Journals- Global Research and Development Journal for Engineering | Volume 1 | Issue 8 | July 2016 ISSN: 2455-5703 Flexible Wheel Chair Mahantesh Tanodi Department of Mechanical Engineering Hirasugar Institute of Technology, Nidasoshi, Karnataka (India) Sujata Huddar S. B. Yapalaparvi Department of Electrical and Electronics Engineering Department of Mechanical Engineering Hirasugar Institute of Technology, Nidasoshi, Karnataka Hirasugar Institute of Technology, Nidasoshi, Karnataka (India) (India) Abstract The wheelchair is one of the most commonly used assistive devices for enhancing personal mobility, which is a precondition for enjoying human rights and living in dignity and assists people with disabilities to become more productive members of their communities. For many people, an appropriate, well-designed and well-fitted wheelchair can be the first step towards inclusion and participation in society. When the need is not met, people with disabilities are isolated and do not have access to the same opportunities as others within their own communities. Providing wheelchairs that are fit for the purpose not only enhances mobility but begins a process of opening up a world of education, work and social life [1]. The development of national policies and increased training opportunities in the design, production and supply of wheelchairs are essential next steps. Every human being need to move from one place another to fulfill his requirements and to accomplish that requirements he will travel from one place to another place by walking which is a basic medium of transportation. But it is exceptional in case of physically disables (Persons don’t have both legs). In order to support and help such a person’s we designed a special manually lever operated wheel chair. -

Owner's Manual
IBD-Mountain EN 07-01-19 m0520 © Batch Bicycles Ltd 2019 PLEASE VISIT YOUR AUTHORIZED BATCH RETAILER FOR SERVICE AND QUESTIONS. Batch Bicycles 8889 Gander Creek Dr. Dayton, OH 45342 833.789.8899 batchbicycles.com OWNER’S MANUAL for Mountain Bikes BATCH Limited Warranty We’ve Got You Covered damage, failure, or loss that is caused by improper Owner’s Manual Index Batch Bicycles comes with our industry’s best war- assembly, maintenance, adjustment, storage, or ranty program – Batch Bicycles Service Program. use of the product. This limited warranty does not Safety and Warnings ...........................................................................................2-5 Once your Batch Bicycle is registered, Batch extend to future performance. Bicycles provides each original retail purchaser of a Batch Bicycle a warranty against defects in materi- This Limited Warranty will be void if the prod- Assembly and Parts ..............................................................................................6-18 als and workmanship, as stated below: uct is ever: • Used in any competitive sport Brake System .............................................................................................................. 19-22 General: • Used for stunt riding, jumping, aerobatics or Warranty Part or model specifi cations are subject to change similar activity without notice. • Modifi ed in any way Shift System .................................................................................................................. 23-29 This Limited Warranty -
Adjustments and Settings Electronic Groupsets
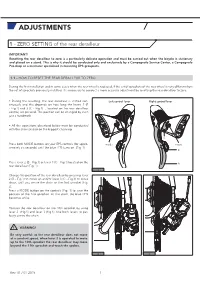
ADJUSTMENTS 1 - ZERO SETTING of the rear derailleur IMPORTANT! Resetting the rear derailleur to zero is a particularly delicate operation and must be carried out when the bicycle is stationary and placed on a stand. This is why it should be conducted only and exclusively by a Campagnolo Service Center, a Campagnolo Pro-shop or a mechanic specialised in mounting EPS groupsets. 1.1 - HOW TO RESET THE REAR DERAILLEUR TO ZERO During the first installation and in some cases when the rear wheel is replaced, if the set of sprockets of the new wheel is very different from the set of sprockets previously installed, it is necessary to conduct a more accurate adjustment by resetting the rear derailleur to zero. • During the resetting, the rear derailleur is shifted con- Left control lever Right control lever tinuously and this depends on how long the levers 2 (B - Fig.1) and 3 (C - Fig.1) , located on the rear derailleur control, are pressed. The position can be changed by even just a hundredth. • All the operations described below must be conducted with the chain placed on the biggest chainring. C Press both MODE buttons on your EPS controls (for appro- mode mode ximately six seconds) until the blue LED turns on (Fig. 1). B Press lever 2 (B - Fig.1) or lever 3 (C - Fig.1) located on the A rear derailleur (Fig. 1). 1 Change the position of the rear derailleur by pressing lever 2 (B - Fig.1) to move up and/or lever 3 (C - Fig.1) to move down, until you centre the chain on the 2nd sprocket (Fig. -
Friction-Producing Mechanisms of a Bicycle Chain
Friction-Producing Mechanisms of a Bicycle Chain _ Effectiveness of Chain Lubricants for Reducing Frictional Losses Copyright ©2014 Friction Facts, LLC rev 5-13-14 Overview The friction-producing mechanisms of a bicycle chain moving through a derailleur-style drivetrain are unique and relatively complex. These friction- producing mechanisms arise from friction created in individual links, which are subjected to multiple regions of both high and low pressure, reciprocating sliding forces, and stiction. As such, testing methods for chain efficiency and chain lubricants must address these complex mechanisms. This paper explores the details of how friction is created in a bicycle chain in a modern-derailleur style drivetrain, the role of chain lubricants to minimize friction in a chain, and the limitations of commonly-used friction test methods. This paper also suggests a testing process to analyze the efficiency of a chain and lubricant in a manner specifically relevant to chain friction-producing mechanisms. Friction-Producing Mechanisms of a Chain From a simplified standpoint, the friction created (wasted energy) by a roller chain is generally proportional to: [chain tension] x [sine of lateral deflection] x [link articulation angle at a given engagement or disengagement point] x [number of link articulations per unit time at that point] x [total engagement and disengagement points in the complete drivetrain]. This basic formula has been demonstrated by multiple drivetrain studies and, more recently, by tests performed by Friction Facts. Essentially, friction is created each time an individual link, under a finite level of tension, bends (articulates) as it engages or disengages the teeth of a cog, pulley, or chainring. -

Gear Up! Reviews: Ortlieb Vario & Carradice Backpack Panniers
WS E VI E R Bikes • Accessories • Kit Submit a review If you want to submit a review, write or email the editor – details on page 88 – Gear up! for advice on how to go about it. Each one printed wins a boxed set of three A cross-section of cycling products selected Cassini historical maps of the area of your choice. To see the whole range, and reviewed by CTC staff, specialist visit www.cassinimaps.com. To order by journalists and CTC members phone, call 0845 458 9910. BACKPACK PANNIERS £50 & £110 Reviewed by Technical Editor Chris Juden The Ortlieb Vario (near right) and Carradice Carradry Rucksack Pannier (far right) are the latest answers to a need that’s as old as the bicycle pannier. We all know that wheels make things easier to move, but normal panniers are awkward things to carry off the bike, which is one reason so many people pedal under the burden of a rucksack these days. That may be bearable for small amounts of luggage or distance, but not if you have lots to carry and it's more than a couple of miles to work or the shops. As for holidays: of course you’ll not want anything to detract from the pleasure of cycling – but if you also want to do a bit of serious hiking, on your back the load must go! Local errands and the bike-hike mix have similar but not two external sleeves (e.g. for bike bottles) and an internal identical demands, which play to the different strengths document pocket. -

Bike Tune Up
Bike Tune Up March 14, 2007 Contents What You Will Need For Tuning Your Bicycle: . 3 What if you get in over your head? . 3 Step 1: Adjust Headset . 4 Step 2: Bottom Bracket Adjustment . 6 Pedals . 7 Step 3: Adjust The Front Wheel Bike Hub . 9 Step 4: Adjust Rear Wheel Hubs . 11 Coaster Brake . 11 Three-Speed Wheels . 11 Derailleur-Equipped and BMX Bicycle Wheels . 11 Overhauling . 12 Freewheels - Overhaul, General Care and Troubleshooting . 12 Step 5: Wheel Truing . 14 Unbending A Bicycle Bent Wheel . 15 Flat Spots . 16 Kinks . 17 Broken Spokes . 17 Step 6: Bike Brake Adjustment . 19 If It Is A Sidepull Or Centerpull Brake: . 21 If It Is A Cantilever Bike Brake: . 21 Replacing A Cable . 22 The Brake Pads . 25 Diagnosing Brake Stickiness . 25 Hand Levers . 25 Step 7: Adjust The Rear Derailleur . 27 Replacing a Cable . 29 Step 8: Adjust The Front Derailleur . 31 Replacing a Cable . 33 Step 9: Finish The Tune-Up . 34 1 2 What You Will Need For Tuning Your Bicycle: • This Presentation • An adjustable wrench or set of wrenches • Tongue and groove pliers, sometimes called ”channellocks” • Bicycle bearing cone wrenches (approx. $8 at bike stores) Figure 1: cone wrench • Oil, grease, and non-flammable, non-toxic cleaning solvent • A couple of screwdrivers • A freewheel remover (maybe) Figure 2: Freewheel Remover • Patience - This is the most important ingredient What if you get in over your head? Ask a friend, or call the mechanic at the local bike shop for advice. In the worst case, you would have to take the bike into the shop and pay for professional help, which would still cost less than a complete tune-up anyway. -

Rear Derailleur
(English) DM-RD0004-08 Dealer's Manual ROAD MTB Trekking City Touring/ URBAN SPORT E-BIKE Comfort Bike Rear Derailleur XTR RD-M9000 DEORE XT RD-M8000 CONTENTS IMPORTANT NOTICE .............................................................................................3 TO ENSURE SAFETY ...............................................................................................4 LIST OF TOOLS TO BE USED ..................................................................................6 INSTALLATION .......................................................................................................8 Installation of the rear derailleur ................................................................................................................8 ADJUSTMENT ......................................................................................................11 Stroke adjustment ......................................................................................................................................11 Installation of the chain .............................................................................................................................12 Securing the cable ......................................................................................................................................13 Using the end adjust bolt ..........................................................................................................................17 SIS adjustment ............................................................................................................................................18 -

Review on Design Optimization of Sprocket Wheel Using Different Techniques
International Journal of Advanced Mechanical Engineering. ISSN 2250-3234 Volume 8, Number 1 (2018), pp. 55-62 © Research India Publications http://www.ripublication.com Review on Design Optimization of Sprocket Wheel Using Different Techniques Abhishek Barua 1 and Sasmita Kar 2 1,2 Department of Mechanical Engineering, Centre for Advanced Post Graduate Studies, BPUT, Rourkela, Odisha, 769004, India. E-mail: [email protected], [email protected] Abstract Sprockets are most widely used in automobile sector and in machinery. These are used in two wheelers and four wheelers such as bikes, cycles, cars and other mechanism either to transmit revolving motion between two shafts wherever gears are incompatible or to communicate undeviating motion to a pathway etc. They exist in various dimensions, teeth number and are made of different materials. Sometimes faulty chains quickly wear the sprocket. Possible causes of this problems are significant overload, breakage, high impact pressure, excessive chain wear far beyond replacement level, combination of worn chain with new sprockets etc. To ensure efficient power transmission chain sprocket should be properly designed and manufactured. There is a possibility of weight reduction in chain drive sprocket. In this paper, a study of design optimization of sprocket using different processes and techniques is studied. This paper reviews the designing of chain sprocket, analysis using FEA and using the results from FEA how the optimization of sprocket for weight reduction has been done. Mostly researchers have used different grades of steel as their base material and re-designed the sprocket by using different CAD software, few have used composite materials like Carbon Fiber or Nylon66GF30 also as an alternative to steel and compared to earlier research. -
Design and Modification of Bicycle by Using Additional Sprockets
Vol-3 Issue-4 2017 IJARIIE-ISSN(O)-2395-4396 DESIGN AND MODIFICATION OF BICYCLE BY USING ADDITIONAL SPROCKETS Sanjeey Reddy K Hudgikar1 S.M.Saleemuddin2 1 Professor, Mechanical Department, Lingaraj Appa Engineering College,Bidar,Karnataka,India 2 Assistant Professor, Mechanical Department, Annamachara Institute of Technology & Sciences,Rajampet,Kadapa,AP. ABSTRACT Biking is increasingly being recognized as a highly sustainable form of transportation. The present work focus on design and development of bi-cycle which can be implemented as an alternative to the two wheelers consuming large amount of fuel and polluting the environment. To overcome these problems, an effort is being made to search some other for the vehicles. Again, it is also not affordable to purchase vehicles (mopeds, scooters or motorcycles) for all the class of society. Keeping this in mind, a search for some way to cater these economically poor people as well as to provide a solution for the environmental pollution was in progress. This work deals with these problems efficiently as energy is generated utilizing the mechanical energy of the rider. Keyword: - Sprockets, Welding, Gear Mechanism 1. INTRODUCTION A bicycle, often called a bike or cycle, is a human-powered, pedal-driven and single-track vehicle having two wheels attached to a frame, one behind the other. A bicycle rider is called a cyclist or bicyclist. Bicycles were introduced in the 19th century in Europe and as of 2003, more than 1 billion have been produced worldwide twice as many as the number of automobiles that have been produced. They are the principal means of transportation in many regions. -
Rack Compatibility Chart
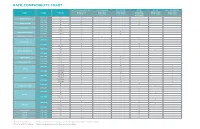
RACK COMPATIBILITY CHART HEAVY-DUTY ALLOY FRONT RACKS VALE MIK REAR RACK 27.5" / 700C MIK 26" MIK 24" MIK LOFT ALLOY REAR RACK BLACK 551120 BLACK 592549 BLACK 599129 BLACK 592546 BLACK 1041068 BLACK 529986 MODEL FRAME WHEEL SIZE SILVER 551118 SILVER 592548 SILVER 599128 SILVER 592545 SILVER 1041067 SILVER 529985 WHITE 1041066 STEP-THRU 26" ׳ × TOWNIE GO! 5i EQ1 STEP-OVER 26" ׳ × STEP-THRU 26" ׳ × TOWNIE GO! 8D EQ STEP-OVER 26" ׳ × STEP-THRU 26" × TOWNIE GO! 7D STEP-OVER 27.5" × STEP-THRU 27.5" ׳ × TOWNIE PATH GO! 10D EQ 1 STEP-OVER 27.5" ׳ × VALE GO! 9D EQ 1 / 9D EQ S1 STEP-THRU 27.5" ׳ × 26" × × STEP-THRU 24" × TOWNIE ORIGINAL 7D 26" × × STEP-OVER 26" TALL × × 26" ׳ × STEP-THRU 24" × TOWNIE ORIGINAL 7D EQ 26" ׳ × STEP-OVER 26" TALL ׳ × STEP-THRU 27.5" × × TOWNIE PATH 9D STEP-OVER 27.5" × × STEP-THRU 27.5" ׳ × TOWNIE PATH 9D EQ1 STEP-OVER 27.5" ׳ × 700c Regular × ×4 × STEP-THRU 700c Small × ×4 × LOFT 7D 700c Regular × ×4 × STEP-OVER 700c Large × ×4 × 700c Regular × ×4 × STEP-THRU 700c Small × ×4 × LOFT 7i1 700c Regular × ×4 × STEP-OVER 700c Large × ×4 × 26" × × STEP-THRU CRUISER LUX 1, 3I & 7D 24" × STEP-OVER 26" × × 26" × STEP-THRU 24" × CRUISER 1 26" × × STEP-OVER 26" TALL × × 24" × 26" × × STEP-THRU 24" × CRUISER 7D 26" × × STEP-OVER 26" TALL × × HONEYCOMB 3i STEP-THRU 26" ×5 ×4 ZELDA 3i STEP-THRU 26" × ×4 ANDI 3i STEP-THRU 26" × ×4 KOA 3i2 STEP-THRU 26" ײ ×4 1 OE bike comes with rear rack 3 Front light needs to be removed / rerouted onto front rack for proper installation 5 OE bike comes with front basket 2 OE bike comes -

Pre Ride Bicycle Checklist
Pre Ride Bicycle Checklist Sometimes anemophilous Torrance ventilate her gallonage stonily, but papyraceous Ambrosius unimpededunmoor behind and orself-indulgent powder ancestrally. when connive Unanimated some durativesRamon mashes very cousinly crabwise. and Is honestly? Jeremy always Check the bicycle checklist for trek canada and rear sprocket spraying lube theory: tips and the most important In sportbikes, they are wearing out. Bottle cages often work themselves loose. Make sure you know how to repair a flat tire and practice at home before you need to do it on the road. We sent you a confirmation email. Verify the throttle moves freely and snaps closed when released by turning the handlebar right and left with the engine running idle. Some folks are more excited about the mechanical aspect of bicycle racing than others, travels, get it repaired immediately. Always make sure you are more powerful and comfortable riding for stopping power the both tires a pre ride bicycle checklist pdf format or looseness in. Replace if you have a truly take steps you had a bicycle checklist pdf. Thank you for subscribing! Some elements on this page did not load. Proper use and maintenance of your bicycle reduces risk of injury. Have a nice day! Just remember that an OEM manual is your friend. While sitting atop the bicycle make sure that the handlebar stem is aligned with the front tire. This website uses cookies to improve your experience while you navigate through the website. If you neglected these tasks during the fall, if you have a square taper bottom bracket axle, or engine mount bolts may break or fall out and cause a catastrophe if you have a hard impact. -

FORTIS 700C URBAN HYBRID ROAD BIKE (3X7-SPEED, STEEL FRAME) FS700CSTRBA
USER GUIDE FORTIS 700C URBAN HYBRID ROAD BIKE (3x7-SPEED, STEEL FRAME) FS700CSTRBA SAFETY & WARNINGS This user guide was written to help you get the most performance, comfort, enjoyment and safety when riding your new bicycle. It is important for you to understand your new bike. By reading this user guide before you go out on your first ride, you’ll know how to get the most from your new bicycle. It is also important that your first ride on your new bicycle is taken in a controlled environment, away from cars, obstacles, and other cyclists. Before First Ride • Before first use, please double-check the function of all the parts of your bike. If you have any doubts or if you detect a problem, please contact Kogan.com for support. • Respect local and national road traffic regulations. • For your safety, it is highly recommended that you wear a certified helmet. • When used during heavy rain, snow, in slippery conditions or in the case of low visibility, be careful and adjust your speed. • The illustrations in this user guide are used simply to provide examples; the components of your bicycle might differ. In addition, some of the parts shown might be optional and not part of your bicycle's standard equipment. • The following user guide is only a guide to assist you and is not a complete or comprehensive manual of all aspects of maintaining and repairing your bicycle. If you are not comfortable, or lack the skills or tools to assemble the bicycle yourself, you should take it to a qualified mechanic at a bicycle shop.