The Radio-Based Train Control System ATACS
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Saitama Page 1/ 4
SAITAMA PAGE 1/ 4 PG-309 SAITAMA 10th Fl., Tokyo Kotsu Kaikan Bldg., 2-10-1, Yurakucho, Chiyoda-ku, Tokyo 100-0006 Tel. (03)3201-3331 Saitama Prefecture, pop. 6,938,000 located in the middle of the Apart from the mountainous northern region, and the Chichibu region, Kanto Plain area, is blessed with an abundance of nature. Visitors can most of the prefecture consists of level ground, and it has the same encounter beautiful scenery with clear spring waters and greenery. warm climate as the Central Tokyo. Access: To From Type of train Time required Fare(¥) Daily runs JR LEX “Narita Express” 1 hr. 2,940 23 Narita Airport JR Rapid “Airport Narita” 1 hr. 24 min. 1,280 16 Tokyo Monorail & JR Yamanote Line (change at Hamamatsu-cho Sta.) 28 min. 620 10–15/hr. Haneda Airport Keikyu Line & JR Yamanote Line 30 min. 560 Every 10 min. Tokyo St.a. (change at Shinagawa Sta.) JR Shinkansen “Nozomi” 2 hrs. 40 min. 14,720 29 Shin-Osaka Sta. JR Shinkansen “Hikari” 3 hrs. 13,750 93 Shin-Kobe Sta. JR Shinkansen “Hikari” 3 hrs. 15 min. 14,270 41 JR Shinkansen “Nozomi” 1 hr. 36 min. 11,340 29 Nagoya Sta. JR Shinkansen “Hikari” 1 hr. 50 min. 10,580 93 Keisei Railways “Skyliner” 56 min. 1,920 21 Ueno Sta. Keisei Railways LEX 1 hr. 16 min. 1,000 4–5/hr. Nippori Sta. Keisei Railways LEX 1 hr. 13 min. 1,000 4–5/hr. Narita Airport Omiya Sta. 2 hrs. ~ 2 hrs. 30 min. Saitama- Bus service “ON Liner” 2,750 18 Shintoshin Sta. -

ERTMS/ETCS Railway Signalling
Appendix A ERTMS/ETCS Railway Signalling Salvatore Sabina, Fabio Poli and Nazelie Kassabian A.1 Interoperable Constituents The basic interoperability constituents in the Control-Command and Signalling Sub- systems are, respectively, defined in TableA.1 for the Control-Command and Sig- nalling On-board Subsystem [1] and TableA.2 for the Control-Command and Sig- nalling Trackside Subsystem [1]. The functions of basic interoperability constituents may be combined to form a group. This group is then defined by those functions and by its remaining exter- nal interfaces. If a group is formed in this way, it shall be considered as an inter- operability constituent. TableA.3 lists the groups of interoperability constituents of the Control-Command and Signalling On-board Subsystem [1]. TableA.4 lists the groups of interoperability constituents of the Control-Command and Signalling Trackside Subsystem [1]. S. Sabina (B) Ansaldo STS S.p.A, Via Paolo Mantovani 3-5, 16151 Genova, Italy e-mail: [email protected] F. Poli Ansaldo STS S.p.A, Via Ferrante Imparato 184, 80147 Napoli, Italy e-mail: [email protected] N. Kassabian Ansaldo STS S.p.A, Via Volvera 50, 10045 Piossasco Torino, Italy e-mail: [email protected] © Springer International Publishing AG, part of Springer Nature 2018 233 L. Lo Presti and S. Sabina (eds.), GNSS for Rail Transportation,PoliTO Springer Series, https://doi.org/10.1007/978-3-319-79084-8 234 Appendix A: ERTMS/ETCS Railway Signalling Table A.1 Basic interoperability constituents in the Control-Command -
SAITAMA, JAPAN Just North of Tokyo Nature, Koedo, Shopping and Events
Crayon Shin-chan There's plenty to see! © U/ F・S・A・A , Saitama Sightseeing Supporter SAITAMA, JAPAN Just North of Tokyo Nature, Koedo, shopping and events Chichibu & North Area West Area Central & East Area Crayon Shin-chan © U/ F・S・A・A , Saitama Sightseeing Supporter Tourism Division, Department of Industry and Labor, Saitama Prefecture ※Some of the facilities shown in this brochure may be temporarily closed, or their hours may be changed due to COVID-19. Please also note that events and festivals may either be delayed or canceled. Thank you for understanding. Visit Saitama Prefecture, where you can experience the past and present of Japan! The Chichibu Area and North Area are full of the appeal of richGUMMA nature, the West Area is where you can feel the atmosphere of Japan, and the Central Area and East Area are a fusion of city and nature. Experience Japanese history and culture in Saitama Prefecture, which is full of attractions! Fujioka IC Fujioka JCT y a w Tobu Nikko Line s e s pr x Joetsu Shinkansen/Hokuriku Shinkansen E 17 u k o Chichibu & North Area h o Chichibu Area and the North Area are full of excitement. T Refresh the soul in magnifi cent natural beauty of Chichibu and T o Hanyu IC b Nagatoro, and taste local dishes of the North Area that have Gyodashi u Ise Sta. s → FOR ak been developed independently. Tohoku Shinkansen 140 125 i L Kazo IC Narita Kumagaya Sta.Takasaki Line ine Airport Hanazono IC H a c Nagatoro Sta. h Kan-etsu ik o L Expressway y ine Kuki a w Shiraoka- l IC Mandarin orange i a Ogawamachi Sta. -

EULYNX the Next Generation Signalling Strategy for Europe
European Initiative Linking Interlocking Subsystems EULYNX The next generation signalling strategy for Europe Signalling Seminar IRSE ITC – JR East Frans Heijnen 7 April 2016 With thanks to Maarten van der Werff What would you do? European Initiative Linking Interlocking Subsystems Situation: • You are an infra manager (…. passenger, tax payer) • Expectations concerning signalling • Huge installed base • Many generations of equipment • Obsolete within 10..20 years • Not enough budget to replace And you know: “At all European railways these problems are similar …” EULYNX 2 What is the problem? European Initiative Linking Interlocking Subsystems • Each railway project adds new assets to become obsolete again • They get overage sooner than expected • Costs depend on whoever was chosen in the past as the supplier of the system • There are potential savings but the railway is stuck with current solutions • But you don’t have a strategy for a new solution EULYNX 3 EULYNX. What is EULYNX? European Initiative Linking Interlocking Subsystems EULYNX is the strategic approach for standardisation of signalling systems Because standardisation is a key factor to reduce: • A ‘technology zoo’ with many different systems, • The number of multiple incompatible interfaces • The cost involved in replacing and renewal EULYNX 4 The vision that becomes reality European Initiative Linking Interlocking Subsystems By systems engineering and the development process • Use a common architecture • With a common apportionment of functionalities • Define standardised -
Presentation File(PDF 4.3
JR East Group Management Vision “Move Up” 2027 Investor Meeting July 4, 2018 Table of Contents 1. Changes in the business environment P3 2. JR East Group’s strengths P5 3. Basic Policies of “Move Up” 2027 P6 4. “Move Up” 2027 (1) Overview P8 (2) Making cities more comfortable P12 (3) Making regional areas more affluent P21 (4) Developing businesses for the world P23 (5) Numerical targets (FY2023), etc. P24 Environmental Group “Move Up” 2027 “Move Up” 2027 1. Changes in the business environment: Decreasing population change strengths Basic Policies Overview Urban cities Regional areas World Targets ■ After 2025, the population in Tokyo metropolitan area (Tokyo, Saitama, Chiba, Kanagawa) is expected to decrease gradually. ■ In Tohoku region (Aomori, Iwate, Miyagi, Akita, Yamagata, Fukushima), the population is expected to decrease by nearly 30% by 2040. (Population in 2015 = 100) 100% Tokyo metropolitan area 90% JR East service area National 80% By 2040 Tohoku region 70% 2015 2020 2025 2030 2035 2040 (Year) Decrease by nearly 30% Source: IPSS (National Institute of Population and Social Security Research) Population Projections by Prefecture (2018) 3 Environmental Group “Move Up” 2027 “Move Up” 2027 1. Changes in the business environment: Decreasing need for railway transportation change strengths Basic Policies Overview Urban cities Regional areas World Targets ■ After 2020, due to decreasing population, changes in the working style, development of internet society and practical application of autonomous driving technologies, the need for railway transportation is expected to decline. Since our railway business has large xed costs, we face a high risk of a drastic prot loss. -

East Japan Railway Company Shin-Hakodate-Hokuto
ANNUAL REPORT 2017 For the year ended March 31, 2017 Pursuing We have been pursuing initiatives in light of the Group Philosophy since 1987. Annual Report 2017 1 Tokyo 1988 2002 We have been pursuing our Eternal Mission while broadening our Unlimited Potential. 1988* 2002 Operating Revenues Operating Revenues ¥1,565.7 ¥2,543.3 billion billion Operating Revenues Operating Income Operating Income Operating Income ¥307.3 ¥316.3 billion billion Transportation (“Railway” in FY1988) 2017 Other Operations (in FY1988) Retail & Services (“Station Space Utilization” in FY2002–2017) Real Estate & Hotels * Fiscal 1988 figures are nonconsolidated. (“Shopping Centers & Office Buildings” in FY2002–2017) Others (in FY2002–2017) Further, other operations include bus services. April 1987 July 1992 March 1997 November 2001 February 2002 March 2004 Establishment of Launch of the Launch of the Akita Launch of Launch of the Station Start of Suica JR East Yamagata Shinkansen Shinkansen Suica Renaissance program with electronic money Tsubasa service Komachi service the opening of atré Ueno service 2 East Japan Railway Company Shin-Hakodate-Hokuto Shin-Aomori 2017 Hachinohe Operating Revenues ¥2,880.8 billion Akita Morioka Operating Income ¥466.3 billion Shinjo Yamagata Sendai Niigata Fukushima Koriyama Joetsumyoko Shinkansen (JR East) Echigo-Yuzawa Conventional Lines (Kanto Area Network) Conventional Lines (Other Network) Toyama Nagano BRT (Bus Rapid Transit) Lines Kanazawa Utsunomiya Shinkansen (Other JR Companies) Takasaki Mito Shinkansen (Under Construction) (As of June 2017) Karuizawa Omiya Tokyo Narita Airport Hachioji Chiba 2017Yokohama Transportation Retail & Services Real Estate & Hotels Others Railway Business, Bus Services, Retail Sales, Restaurant Operations, Shopping Center Operations, IT & Suica business such as the Cleaning Services, Railcar Advertising & Publicity, etc. -

Welcome to Wonton09 (0) How to Get JR EAST Pass?
Welcome to Wonton09 (0) How to get JR EAST pass? You need to but JR EAST pass before the start of trip at your country. You can buy JR EAST online. http://www.jreast.co.jp/e/eastpass/obtain.html Once you bought it, you need to get the pass before using this after entering Japan. at Narita terminal 1 http://www.jreast.co.jp/e/stations/e1130.html at Narita terminal 2 http://www.jreast.co.jp/e/stations/e611.html at Sendai Station http://www.jreast.co.jp/e/stations/e913.html Flexible 4 days ticket is recommended http://www.jreast.co.jp/e/eastpass/prices.html You can reserve NEX (Narita express from Narita-Tokyo) and Shinkansen from Tokyo to Sendai. http://www.jreast.co.jp/e/eastpass/reservation.html If you want to know more, http://www.jreast.co.jp/e/eastpass/index.html (1) From Narita-airport to Sendai Station If you have JR-EAST pass, please reserve two tickets NEXT from Narita to Tokyo (60min) and Shikansen ( a bullet train in Japan) from Tokyo to Sendai at Narita airport. If you do not have JR-EAST pass, you can take a Keisei-line to Ueno Station which is cheaper, then take Shinkansen train from JR Ueno to Sendai. You need to buy normal ticket from Ueno to Matsushima Kaigan and express ticket from Ueno to Sendai. In any case, you put all tickets to the gate machine and take the necessary ticket to continue the trip. Tips: Since I have never used JR-EAST PASS, I do not know well. -
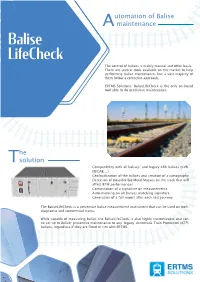
Balise Lifecheck the Control of Balises Is Mainly Manual and Often Basic
utomation of Balise A maintenance Balise LifeCheck The control of balises is mainly manual and often basic. There are several tools available on the market to help performing balise maintenance, but a vast majority of them follow a corrective approach. ERTMS Solutions’ BaliseLifeCheck is the only on-board tool able to do predictive maintenance. he Tsolution • Compatibility with all balises’ and legacy KER balises (KVB, EBICAB,...) • Geolocalization of the balises and creation of a cartography • Detection of possible Big Metal Masses on the track that will affect BTM performances • Computation of a signature on measurements • Auto-marking on all balises matching signature • Generation of a full report after each test journey The BaliseLifeCheck is a preventive balise measurement instrument that can be used on both diagnostic and commercial trains. While capable of measuring balise, the BaliseLifeCheck is also highly customizable and can be set-up to deliver preventive maintenance to any ‘legacy’ Automatic Train Protection (ATP) balises, regardless if they are fitted or not with ERTMS. The Benefits On-board The system has been designed to be installed on-board a test or maintenance train which purpose is to analyze test tracks and active lines. Measurement It measures key electrical parameters of the up link signal and verifies if they comply with the requirements of Subset-036 in the case of ETCS balises. In this case some measurements/tests are performed against requirements of Subset-085. Diagnosis The main goal of the tool is to provide measurements and evidences which assess the correct behavior of balises that are already deployed on the field. -

Unifying Rail Transportation and Disaster Resilience in Tokyo
University of Arkansas, Fayetteville ScholarWorks@UARK Architecture Undergraduate Honors Theses Architecture 5-2020 The Yamanote Loop: Unifying Rail Transportation and Disaster Resilience in Tokyo Mackenzie Wade Follow this and additional works at: https://scholarworks.uark.edu/archuht Part of the Urban, Community and Regional Planning Commons Citation Wade, M. (2020). The Yamanote Loop: Unifying Rail Transportation and Disaster Resilience in Tokyo. Architecture Undergraduate Honors Theses Retrieved from https://scholarworks.uark.edu/archuht/41 This Thesis is brought to you for free and open access by the Architecture at ScholarWorks@UARK. It has been accepted for inclusion in Architecture Undergraduate Honors Theses by an authorized administrator of ScholarWorks@UARK. For more information, please contact [email protected]. The Yamanote Loop: Unifying Rail Transportation and Disaster Resilience in Tokyo by Mackenzie T. Wade A capstone submitted to the University of Arkansas in partial fulfillment of the requirements of the Honors Program of the Department of Architecture in the Fay Jones School of Architecture + Design Department of Architecture Fay Jones School of Architecture + Design University of Arkansas May 2020 Capstone Committee: Dr. Noah Billig, Department of Landscape Architecture Dr. Kim Sexton, Department of Architecture Jim Coffman, Department of Landscape Architecture © 2020 by Mackenzie Wade All rights reserved. ACKNOWLEDGEMENTS I would like to acknowledge my honors committee, Dr. Noah Billig, Dr. Kim Sexton, and Professor Jim Coffman for both their interest and incredible guidance throughout this project. This capstone is dedicated to my family, Grammy, Mom, Dad, Kathy, Alyx, and Sam, for their unwavering love and support, and to my beloved grandfather, who is dearly missed. -

Park Cube Shin Itabashi and Another Property)
March 13, 2018 To All Concerned Parties Issuer of Real Estate Investment Trust Securities 4-1, Nihonbashi 1-chome, Chuo-Ku, Tokyo 103-0027 Nippon Accommodations Fund Inc. Executive Director Takashi Ikeda (Code Number 3226) Investment Trust Management Company Mitsui Fudosan Accommodations Fund Management Co., Ltd. President and CEO Tateyuki Ikura Contact CFO and Director Satoshi Nohara (TEL. 03-3246-3677) Notification Concerning Acquisition of Domestic Real Estate Properties (Park Cube Shin Itabashi and another property) This is a notification that Mitsui Fudosan Accommodations Fund Management Co., Ltd., an investment trust management company, which has been commissioned by Nippon Accommodations Fund Inc. (“NAF”) to manage its assets, decided on the acquisition of real estate properties in Japan as shown below. 1. Reason for acquisition Based on the provisions for investments and policies on asset management provided in the Articles of Incorporation, the decision to acquire the following properties was made to ensure the steady growth of assets under management, and for the diversification and further enhancement of the investment portfolio. 2. Overview for acquisition Type of Planned acquisition Appraised value Name of property to be acquired property price (Note 3) (Note 4) to be acquired (thousands of yen) (thousands of yen) Property 1 Park Cube Shin Itabashi (Note 1) Real estate 1,700,000 1,740,000 Property 2 Park Cube Nishi Shinjuku (Note 2) Real estate 2,400,000 2,430,000 Total 4,100,000 4,170,000 (1) Date of conclusion of sale contract March 13, 2018 (2) Planned date of handover Property 1 March 29, 2018 Property 2 September 3, 2018 (3) Seller Property 1 Not disclosed (Note 5) Property 2 ITOCHU Property Development, Ltd. -

Suica Pasmo Network
To Matō Kassemba Ienaka Tōbu-kanasaki Niregi Momiyama Kita-kanuma Itaga Shimo-goshiro Myōjin Imaichi Nikkō Line To Aizu-Wakamatsu To Sendai To Fukushima Jōban Line To Haranomachi Watarase Keikoku Railway Nikkō Ban-etsu-East Line Shin-kanuma Niigata Area Akagi Tanuma Tada Tōbu Nikkō Line Minami- Tōbu-nikkō Iwaki / Network Map To Chuo-Maebashi ※3 To Kōriyama Kuzū Kami- Uchigō To Murakami ★ Yashū-ōtsuka Kuniya Omochanomachi Nishikawada Esojima utsunomiya Tōhoku Line Tōbu Sano Line TsurutaKanumaFubasami Shin-fujiwara Jomo Electric Railway Yoshimizu Shin-tochigi Shimo- imaichi Shin-takatokuKosagoeTobu WorldKinugawa-onsen SquareKinugawa-kōen Yumoto ■Areas where Suica /PASMO can be used Yashū-hirakawa Mibu Tōbu Utsunomiya Line Yasuzuka Kuroiso Shibata Tōhoku Tōhoku Shinkansen imaichi Line Aizu Kinugawa Aioi Nishi-Kiryu Horigome Utsunomiya Line Shimotsuke-Ōsawa Tōbu Kinugawa Line Izumi Daiyamukō Ōkuwa Railway Yagantetsudo To Naoetsu To Niigata Omata YamamaeAshikagaAshikaga TomitaFlower Park Tōbu-utsunomiya Ueda Yaita Nozaki Nasushiobara Nishi-Shibata Nakaura Echigo TOKImeki Railway Ishibashi Suzumenomiya Nakoso Kunisada Iwajuku Shin-kiryū Kiryū Ryōmō Line Sano Iwafune Ōhirashita Tochigi Omoigawa To Naganoharakusatsuguchi ShikishimaTsukudaIwamotoNumataGokan KamimokuMinakami Shin-ōhirashita Jichi Medical Okamoto Hōshakuji Karasuyama Ujiie Utsunomiya Kamasusaka Kataoka Nishi-Nasuno Ōtsukō Sasaki To Echigo-Yuzawa Azami Sanoshi To Motegi Utsunomiya Line Line Uetsu LineTsukioka Jōmō-Kōgen ★ Shizuwa University Isohara Shibukawa Jōetsu Line Yabuzuka -

JR East Technical Review No.37-2017
Special feature article Efforts to Improve Safety Level According to “Group Safety Plan 2018” Takashi Hirokawa Transport Safety Department in East Japan Railway Company Abstract East Japan Railway Company (JR East) regards “safety” as the most important issue of management and aims for “extreme safety levels” in both physical and applicational aspects. Currently, in cooperation with the technology development departments, physical measures are being implemented according to the direction clarified in the five-year Safety Plan, “JR East Group Safety Plan 2018”. •Keywords: Safety, Extreme safety levels, Group Safety Plan 2018, Systems for safety 1. Introduction JR East has placed safety as the top priority issue since the company’s inception in April 1987 and is continuously working on improving safety in both physical and applicational aspects. We established the sixth five-year Safety Plan, “JR East Group Safety Plan 2018”, in April 2014 and the group as a whole is working to achieve “zero passenger fatalities and injuries” and “zero employee fatalities”. As a result of such efforts, the number of railway operation accidents as shown in Fig. 2 has dropped significantly from that at the start of the company. Even so, the decline in number of level crossing obstruction accidents and injury/fatality accidents has slowed, and incidents have occurred that could have resulted in death or injury even though they did not lead to railway operation accidents. So, we need to continue to keep up with efforts that go even further than before in an