Waves, Which Illustrate Springs, Discretization, and Special Cases – a fitting, Unified Way to End the Book
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Glossary Physics (I-Introduction)
1 Glossary Physics (I-introduction) - Efficiency: The percent of the work put into a machine that is converted into useful work output; = work done / energy used [-]. = eta In machines: The work output of any machine cannot exceed the work input (<=100%); in an ideal machine, where no energy is transformed into heat: work(input) = work(output), =100%. Energy: The property of a system that enables it to do work. Conservation o. E.: Energy cannot be created or destroyed; it may be transformed from one form into another, but the total amount of energy never changes. Equilibrium: The state of an object when not acted upon by a net force or net torque; an object in equilibrium may be at rest or moving at uniform velocity - not accelerating. Mechanical E.: The state of an object or system of objects for which any impressed forces cancels to zero and no acceleration occurs. Dynamic E.: Object is moving without experiencing acceleration. Static E.: Object is at rest.F Force: The influence that can cause an object to be accelerated or retarded; is always in the direction of the net force, hence a vector quantity; the four elementary forces are: Electromagnetic F.: Is an attraction or repulsion G, gravit. const.6.672E-11[Nm2/kg2] between electric charges: d, distance [m] 2 2 2 2 F = 1/(40) (q1q2/d ) [(CC/m )(Nm /C )] = [N] m,M, mass [kg] Gravitational F.: Is a mutual attraction between all masses: q, charge [As] [C] 2 2 2 2 F = GmM/d [Nm /kg kg 1/m ] = [N] 0, dielectric constant Strong F.: (nuclear force) Acts within the nuclei of atoms: 8.854E-12 [C2/Nm2] [F/m] 2 2 2 2 2 F = 1/(40) (e /d ) [(CC/m )(Nm /C )] = [N] , 3.14 [-] Weak F.: Manifests itself in special reactions among elementary e, 1.60210 E-19 [As] [C] particles, such as the reaction that occur in radioactive decay. -

Type-I Hyperbolic Metasurfaces for Highly-Squeezed Designer
Type-I hyperbolic metasurfaces for highly-squeezed designer polaritons with negative group velocity Yihao Yang1,2,3,4, Pengfei Qin2, Xiao Lin3, Erping Li2, Zuojia Wang5,*, Baile Zhang3,4,*, and Hongsheng Chen1,2,* 1State Key Laboratory of Modern Optical Instrumentation, College of Information Science and Electronic Engineering, Zhejiang University, Hangzhou 310027, China. 2Key Lab. of Advanced Micro/Nano Electronic Devices & Smart Systems of Zhejiang, The Electromagnetics Academy at Zhejiang University, Zhejiang University, Hangzhou 310027, China. 3Division of Physics and Applied Physics, School of Physical and Mathematical Sciences, Nanyang Technological University, 21 Nanyang Link, Singapore 637371, Singapore. 4Centre for Disruptive Photonic Technologies, The Photonics Institute, Nanyang Technological University, 50 Nanyang Avenue, Singapore 639798, Singapore. 5School of Information Science and Engineering, Shandong University, Qingdao 266237, China *[email protected] (Z.W.); [email protected] (B.Z.); [email protected] (H.C.) Abstract Hyperbolic polaritons in van der Waals materials and metamaterial heterostructures provide unprecedenced control over light-matter interaction at the extreme nanoscale. Here, we propose a concept of type-I hyperbolic metasurface supporting highly-squeezed magnetic designer polaritons, which act as magnetic analogues to hyperbolic polaritons in the hexagonal boron nitride (h-BN) in the first Reststrahlen band. Comparing with the natural h-BN, the size and spacing of the metasurface unit cell can be readily scaled up (or down), allowing for manipulating designer polaritons in frequency and in space at will. Experimental measurements display the cone-like hyperbolic dispersion in the momentum space, associating with an effective refractive index up to 60 and a group velocity down to 1/400 of the light speed in vacuum. -

Double Negative Dispersion Relations from Coated Plasmonic Rods∗
MULTISCALE MODEL. SIMUL. c 2013 Society for Industrial and Applied Mathematics Vol. 11, No. 1, pp. 192–212 DOUBLE NEGATIVE DISPERSION RELATIONS FROM COATED PLASMONIC RODS∗ YUE CHEN† AND ROBERT LIPTON‡ Abstract. A metamaterial with frequency dependent double negative effective properties is constructed from a subwavelength periodic array of coated rods. Explicit power series are developed for the dispersion relation and associated Bloch wave solutions. The expansion parameter is the ratio of the length scale of the periodic lattice to the wavelength. Direct numerical simulations for finite size period cells show that the leading order term in the power series for the dispersion relation is a good predictor of the dispersive behavior of the metamaterial. Key words. metamaterials, dispersion relations, Bloch waves, simulations AMS subject classifications. 35Q60, 68U20, 78A48, 78M40 DOI. 10.1137/120864702 1. Introduction. Metamaterials are artificial materials designed to have elec- tromagnetic properties not generally found in nature. One contemporary area of research explores novel subwavelength constructions that deliver metamaterials with both a negative bulk dielectric constant and bulk magnetic permeability across cer- tain frequency intervals. These double negative materials are promising materials for the creation of negative index superlenses that overcome the small diffraction limit and have great potential in applications such as biomedical imaging, optical lithography, and data storage. The early work of Veselago [39] identified novel ef- fects associated with hypothetical materials for which both the dielectric constant and magnetic permeability are simultaneously negative. Such double negative media support electromagnetic wave propagation in which the phase velocity is antiparallel to the direction of energy flow and other unusual electromagnetic effects, such as the reversal of the Doppler effect and Cerenkov radiation. -

Music Synthesis
MUSIC SYNTHESIS Sound synthesis is the art of using electronic devices to create & modify signals that are then turned into sound waves by a speaker. Making Waves: WGRL - 2015 Oscillators An oscillator generates a consistent, repeating signal. Signals from oscillators and other sources are used to control the movement of the cones in our speakers, which make real sound waves which travel to our ears. An oscillator wiggles an audio signal. DEMONSTRATE: If you tie one end of a rope to a doorknob, stand back a few feet, and wiggle the other end of the rope up and down really fast, you're doing roughly the same thing as an oscillator. REVIEW: Frequency and pitch Frequency, measured in cycles/second AKA Hertz, is the rate at which a sound wave moves in and out. The length of a signal cycle of a waveform is the span of time it takes for that waveform to repeat. People generally hear an increase in the frequency of a sound wave as an increase in pitch. F DEMONSTRATE: an oscillator generating a signal that repeats at the rate of 440 cycles per second will have the same pitch as middle A on a piano. An oscillator generating a signal that repeats at 880 cycles per second will have the same pitch as the A an octave above middle A. Types of Waveforms: SINE The SINE wave is the most basic, pure waveform. These simple waves have only one frequency. Any other waveform can be created by adding up a series of sine waves. In this picture, the first two sine waves In this picture, a sine wave is added to its are added together to produce a third. -

Plasma Waves
Plasma Waves S.M.Lea January 2007 1 General considerations To consider the different possible normal modes of a plasma, we will usually begin by assuming that there is an equilibrium in which the plasma parameters such as density and magnetic field are uniform and constant in time. We will then look at small perturbations away from this equilibrium, and investigate the time and space dependence of those perturbations. The usual notation is to label the equilibrium quantities with a subscript 0, e.g. n0, and the pertrubed quantities with a subscript 1, eg n1. Then the assumption of small perturbations is n /n 1. When the perturbations are small, we can generally ignore j 1 0j ¿ squares and higher powers of these quantities, thus obtaining a set of linear equations for the unknowns. These linear equations may be Fourier transformed in both space and time, thus reducing the differential equations to a set of algebraic equations. Equivalently, we may assume that each perturbed quantity has the mathematical form n = n exp i~k ~x iωt (1) 1 ¢ ¡ where the real part is implicitly assumed. Th³is form descri´bes a wave. The amplitude n is in ~ general complex, allowing for a non•zero phase constant φ0. The vector k, called the wave vector, gives both the direction of propagation of the wave and the wavelength: k = 2π/λ; ω is the angular frequency. There is a relation between ω and ~k that is determined by the physical properties of the system. The function ω ~k is called the dispersion relation for the wave. -

Phase and Group Velocity
Assignment 4 PHSGCOR04T Sound Model Questions & Answers Phase and Group velocity Department of Physics, Hiralal Mazumdar Memorial College For Women, Dakshineswar Course Prepared by Parthapratim Pradhan 60 Lectures ≡ 4 Credits April 14, 2020 1. Define phase velocity and group velocity. We know that a traveling wave or a progressive wave propagated through a medium in a +ve x direction with a velocity v, amplitude a and wavelength λ is described by 2π y = a sin (vt − x) (1) λ If n be the frequency of the wave, then wave velocity v = nλ in this situation the traveling wave can be written as 2π x y = a sin (nλt − x)= a sin 2π(nt − ) (2) λ λ This can be rewritten as 2π y = a sin (2πnt − x) (3) λ = a sin (ωt − kx) (4) 2π 2π where ω = T = 2πn is called angular frequency of the wave and k = λ is called propagation constant or wave vector. This is simply a traveling wave equation. The Eq. (4) implies that the phase (ωt − kx) of the wave is constant. Thus ωt − kx = constant Differentiating with respect to t, we find dx dx ω ω − k = 0 ⇒ = dt dt k This velocity is called as phase velocity (vp). Thus it is defined as the ratio between the frequency and the wavelength of a monochromatic wave. dx ω 2πn λ vp = = = 2π = nλ = = v dt k λ T This means that for a monochromatic wave Phase velocity=Wave velocity 1 Where as the group velocity is defined as the ratio between the change in frequency and change in wavelength of a wavegroup or wave packet dω ∆ω ω1 − ω2 vg = = = dk ∆k k1 − k2 of two traveling wave described by the equations y1 = a sin (ω1 t − k1 x)and y2 = a sin (ω2 t − k2 x). -

Dispersion Relation & Index Ellipsoids
8/27/2020 Advanced Electromagnetics: 21st Century Electromagnetics Dispersion Relation & Index Ellipsoids Lecture Outline • Dispersion relation • Dispersion surfaces • Index ellipsoids Slide 2 1 8/27/2020 Dispersion Relation Slide 3 The Wave Vector The wave vector (wave momentum) is a vector quantity that conveys two pieces of information: 1. Wavelength and Refractive Index –The magnitude of the wave vector conveys the spatial period (i.e. wavelength) of the wave inside the material. When the frequency is known, the magnitude conveys the material’s refractive index n (more to be said later). 22 n k 0 free space wavelength 0 2. Direction –The direction of the wave is perpendicular to the wave fronts (more to be said later). ˆ kkakbkcabcˆˆ Slide 4 2 8/27/2020 The Dispersion Relation The dispersion relation for a material relates the wave vector to frequency . Essentially, it sets a rule for the values of as a function of direction and frequency. For an ordinary linear, homogeneous and isotropic (LHI) material, the dispersion relation is: 2 222n kkkabc c0 222 kkkabc 2 This can also be written as: 2 kk000 nc0 Slide 5 How to Derive the Dispersion Relation (1 of 2) The wave equation in a linear homogeneous anisotropic material is: 2 Assume no magnetic response i. e. 1 . Ek 00 r E 0 The solution to this equation is still a plane wave, but the allowed values for (modes) are more complicated. jk r ˆ E Ee00 E Eaabcˆˆ Eb Ec Substituting this solution into the wave equation leads to the following relation: 2 kk E000r0 kE k E 0 This equation has the form: abcˆˆ ˆ 0 Each (•••) term has the form: EEEabc 0 Each vector component must be set to zero independently. -
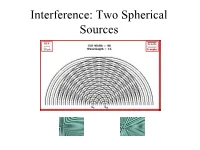
Interference: Two Spherical Sources Superposition
Interference: Two Spherical Sources Superposition Interference Waves ADD: Constructive Interference. Waves SUBTRACT: Destructive Interference. In Phase Out of Phase Superposition Traveling waves move through each other, interfere, and keep on moving! Pulsed Interference Superposition Waves ADD in space. Any complex wave can be built from simple sine waves. Simply add them point by point. Simple Sine Wave Simple Sine Wave Complex Wave Fourier Synthesis of a Square Wave Any periodic function can be represented as a series of sine and cosine terms in a Fourier series: y() t ( An sin2ƒ n t B n cos2ƒ) n t n Superposition of Sinusoidal Waves • Case 1: Identical, same direction, with phase difference (Interference) Both 1-D and 2-D waves. • Case 2: Identical, opposite direction (standing waves) • Case 3: Slightly different frequencies (Beats) Superposition of Sinusoidal Waves • Assume two waves are traveling in the same direction, with the same frequency, wavelength and amplitude • The waves differ in phase • y1 = A sin (kx - wt) • y2 = A sin (kx - wt + f) • y = y1+y2 = 2A cos (f/2) sin (kx - wt + f/2) Resultant Amplitude Depends on phase: Spatial Interference Term Sinusoidal Waves with Constructive Interference y = y1+y2 = 2A cos (f/2) sin (kx - wt + f /2) • When f = 0, then cos (f/2) = 1 • The amplitude of the resultant wave is 2A – The crests of one wave coincide with the crests of the other wave • The waves are everywhere in phase • The waves interfere constructively Sinusoidal Waves with Destructive Interference y = y1+y2 = 2A cos (f/2) -

7 Plasmonics
7 Plasmonics Highlights of this chapter: In this chapter we introduce the concept of surface plasmon polaritons (SPP). We discuss various types of SPP and explain excitation methods. Finally, di®erent recent research topics and applications related to SPP are introduced. 7.1 Introduction Long before scientists have started to investigate the optical properties of metal nanostructures, they have been used by artists to generate brilliant colors in glass artefacts and artwork, where the inclusion of gold nanoparticles of di®erent size into the glass creates a multitude of colors. Famous examples are the Lycurgus cup (Roman empire, 4th century AD), which has a green color when observing in reflecting light, while it shines in red in transmitting light conditions, and church window glasses. Figure 172: Left: Lycurgus cup, right: color windows made by Marc Chagall, St. Stephans Church in Mainz Today, the electromagnetic properties of metal{dielectric interfaces undergo a steadily increasing interest in science, dating back in the works of Gustav Mie (1908) and Rufus Ritchie (1957) on small metal particles and flat surfaces. This is further moti- vated by the development of improved nano-fabrication techniques, such as electron beam lithographie or ion beam milling, and by modern characterization techniques, such as near ¯eld microscopy. Todays applications of surface plasmonics include the utilization of metal nanostructures used as nano-antennas for optical probes in biology and chemistry, the implementation of sub-wavelength waveguides, or the development of e±cient solar cells. 208 7.2 Electro-magnetics in metals and on metal surfaces 7.2.1 Basics The interaction of metals with electro-magnetic ¯elds can be completely described within the frame of classical Maxwell equations: r ¢ D = ½ (316) r ¢ B = 0 (317) r £ E = ¡@B=@t (318) r £ H = J + @D=@t; (319) which connects the macroscopic ¯elds (dielectric displacement D, electric ¯eld E, magnetic ¯eld H and magnetic induction B) with an external charge density ½ and current density J. -

Chapter 1 Waves in Two and Three Dimensions
Chapter 1 Waves in Two and Three Dimensions In this chapter we extend the ideas of the previous chapter to the case of waves in more than one dimension. The extension of the sine wave to higher dimensions is the plane wave. Wave packets in two and three dimensions arise when plane waves moving in different directions are superimposed. Diffraction results from the disruption of a wave which is impingent upon an object. Those parts of the wave front hitting the object are scattered, modified, or destroyed. The resulting diffraction pattern comes from the subsequent interference of the various pieces of the modified wave. A knowl- edge of diffraction is necessary to understand the behavior and limitations of optical instruments such as telescopes. Diffraction and interference in two and three dimensions can be manipu- lated to produce useful devices such as the diffraction grating. 1.1 Math Tutorial — Vectors Before we can proceed further we need to explore the idea of a vector. A vector is a quantity which expresses both magnitude and direction. Graph- ically we represent a vector as an arrow. In typeset notation a vector is represented by a boldface character, while in handwriting an arrow is drawn over the character representing the vector. Figure 1.1 shows some examples of displacement vectors, i. e., vectors which represent the displacement of one object from another, and introduces 1 CHAPTER 1. WAVES IN TWO AND THREE DIMENSIONS 2 y Paul B y B C C y George A A y Mary x A x B x C x Figure 1.1: Displacement vectors in a plane. -
Tektronix Signal Generator
Signal Generator Fundamentals Signal Generator Fundamentals Table of Contents The Complete Measurement System · · · · · · · · · · · · · · · 5 Complex Waves · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 The Signal Generator · · · · · · · · · · · · · · · · · · · · · · · · · · · · 6 Signal Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Analog or Digital? · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 7 Analog Modulation · · · · · · · · · · · · · · · · · · · · · · · · · 15 Basic Signal Generator Applications· · · · · · · · · · · · · · · · 8 Digital Modulation · · · · · · · · · · · · · · · · · · · · · · · · · · 15 Verification · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Frequency Sweep · · · · · · · · · · · · · · · · · · · · · · · · · · · 16 Testing Digital Modulator Transmitters and Receivers · · 8 Quadrature Modulation · · · · · · · · · · · · · · · · · · · · · 16 Characterization · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 8 Digital Patterns and Formats · · · · · · · · · · · · · · · · · · · 16 Testing D/A and A/D Converters · · · · · · · · · · · · · · · · · 8 Bit Streams · · · · · · · · · · · · · · · · · · · · · · · · · · · · · · 17 Stress/Margin Testing · · · · · · · · · · · · · · · · · · · · · · · · · · · 9 Types of Signal Generators · · · · · · · · · · · · · · · · · · · · · · 17 Stressing Communication Receivers · · · · · · · · · · · · · · 9 Analog and Mixed Signal Generators · · · · · · · · · · · · · · 18 Signal Generation Techniques -

Phase and Group Velocities of Surface Waves in Left-Handed Material Waveguide Structures
Optica Applicata, Vol. XLVII, No. 2, 2017 DOI: 10.5277/oa170213 Phase and group velocities of surface waves in left-handed material waveguide structures SOFYAN A. TAYA*, KHITAM Y. ELWASIFE, IBRAHIM M. QADOURA Physics Department, Islamic University of Gaza, Gaza, Palestine *Corresponding author: [email protected] We assume a three-layer waveguide structure consisting of a dielectric core layer embedded between two left-handed material claddings. The phase and group velocities of surface waves supported by the waveguide structure are investigated. Many interesting features were observed such as normal dispersion behavior in which the effective index increases with the increase in the propagating wave frequency. The phase velocity shows a strong dependence on the wave frequency and decreases with increasing the frequency. It can be enhanced with the increase in the guiding layer thickness. The group velocity peaks at some value of the normalized frequency and then decays. Keywords: slab waveguide, phase velocity, group velocity, left-handed materials. 1. Introduction Materials with negative electric permittivity ε and magnetic permeability μ are artifi- cially fabricated metamaterials having certain peculiar properties which cannot be found in natural materials. The unusual properties include negative refractive index, reversed Goos–Hänchen shift, reversed Doppler shift, and reversed Cherenkov radiation. These materials are known as left-handed materials (LHMs) since the electric field, magnetic field, and the wavevector form a left-handed set. VESELAGO was the first who investi- gated the propagation of electromagnetic waves in such media and predicted a number of unusual properties [1]. Till now, LHMs have been realized successfully in micro- waves, terahertz waves and optical waves.