Master's Thesis Fusion of Lidar and Stereo Point Clouds Using
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Designing with Sensors: Creating Adaptive Experiences Avi Itzkovitch UI/UX Designer @Xgmedia What Is Adaptive Design? Responsive Design Adaptive Design
@xgmedia #ParisWeb Designing with Sensors: Creating Adaptive Experiences Avi Itzkovitch UI/UX Designer @xgmedia What is Adaptive Design? Responsive Design Adaptive Design 2002 Minority Report 2007 Homing Device 2007 First iPhone 2007 2013 Examples? GARMIN Zumo 660 Day and Night Interface Google Now Public transit When you’re near a bus stop or a subway station, Google Now tells you what buses or trains are next. Next appointment Get a notification for when you should leave to your next appointment. Based on synced calendars and current location. Ubiquitous Computing Mark Weiser “The most profound technologies are those that disappear. They weave themselves into the fabric of everyday life until they are indistinguishable from it.” Nest, The Learning Thermostat TEMPERATURE SENSOR AMBIENT LIGHT SENSOR TEMPERATURE AND HUMIDITY SENSOR WI-FI ANTENNA RADIO - Connects with home Wi-Fi network NEAR-FIELD MOTION SENSOR FAR-FIELD MOTION SENSOR WHAT IS AN ADAPTIVE SENSOR? Accelerometer Accelerometer List of sensors http://en.wikipedia.org/wiki/List_of_sensors • Geophone • Electrochemical gas • Air flow meter • Accelerometer • Charge-coupled device • Hydrophone sensor • Anemometer • Auxanometer • Colorimeter • Lace Sensor a guitar • Electronic nose • Flow sensor • Capacitive displacement • Contact image sensor pickup • Electrolyte–insulator– • Gas meter sensor • Electro-optical sensor • Microphone semiconductor sensor • Mass flow sensor • Capacitive sensing • Flame detector • Seismometer • Fluorescent chloride • Water meter • Free fall sensor • Infra-red -
Interstate-Mcbee Engine Sensors As Engines Continue to Become More Complex, Sensors Have Become an Increasingly Crucial Component for Proper Performance
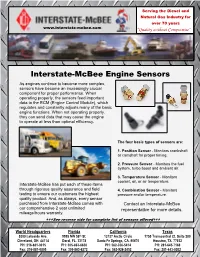
Serving the Diesel and Natural Gas Industry for over 70 years www.interstate-mcbee.com “Quality without Compromise” Interstate-McBee Engine Sensors As engines continue to become more complex, sensors have become an increasingly crucial component for proper performance. When operating properly, the sensors feed important data to the ECM (Engine Control Module), which regulates and constantly adjusts many of the basic engine functions. When not operating properly, they can send data that may cause the engine to operate at less than optimal efficiency. The four basic types of sensors are: 1. Position Sensor - Monitors crankshaft or camshaft for proper timing. 2. Pressure Sensor - Monitors the fuel system, turbo boost and ambient air. 3. Temperature Sensor - Monitors coolant, oil, or air temperature. Interstate-McBee has put each of these items through rigorous quality assurance and field 4. Combination Sensor - Monitors testing to ensure our customers the highest pressure and/or temperature. quality product. And, as always, every sensor purchased from Interstate-McBee comes with Contact an Interstate-McBee our comprehensive 2 year unlimited representative for more details. mileage/hours warranty. +++See reverse side for complete list of sensors offered+++ World Headquarters Florida California Texas 5300 Lakeside Ave. 9995 NW 58th St. 13137 Arctic Circle 1755 Transcentral Ct. Suite 200 Cleveland, OH. 44114 Doral, FL. 33178 Santa Fe Springs, CA. 90670 Houston, TX. 77032 PH: 216-881-0015 PH: 305-863-6650 PH: 562-356-5414 PH: 281-645-7168 Fax: -

Fiber-Optic Chemical Sensors and Fiber-Optic Bio-Sensors
Sensors 2015, 15, 25208-25259; doi:10.3390/s151025208 OPEN ACCESS sensors ISSN 1424-8220 www.mdpi.com/journal/sensors Review Fiber-Optic Chemical Sensors and Fiber-Optic Bio-Sensors Marie Pospíšilová 1, Gabriela Kuncová 2 and Josef Trögl 3,* 1 Czech Technical University, Faculty of Biomedical Engeneering, Nám. Sítná 3105, 27201 Kladno, Czech Republic; E-Mail: [email protected] 2 Institute of Chemical Process Fundamentals, ASCR, Rozvojová 135, 16500 Prague, Czech Republic; E-Mail: [email protected] 3 Faculty of Environment, Jan Evangelista Purkyně University in Ústí nad Labem, Králova Výšina 3132/7, 40096 Ústí nad Labem, Czech Republic * Author to whom correspondence should be addressed; E-Mail: [email protected]; Tel.: +420-475-284-153. Academic Editor: Stefano Mariani Received: 26 July 2015 / Accepted: 14 September 2015 / Published: 30 September 2015 Abstract: This review summarizes principles and current stage of development of fiber-optic chemical sensors (FOCS) and biosensors (FOBS). Fiber optic sensor (FOS) systems use the ability of optical fibers (OF) to guide the light in the spectral range from ultraviolet (UV) (180 nm) up to middle infrared (IR) (10 µm) and modulation of guided light by the parameters of the surrounding environment of the OF core. The introduction of OF in the sensor systems has brought advantages such as measurement in flammable and explosive environments, immunity to electrical noises, miniaturization, geometrical flexibility, measurement of small sample volumes, remote sensing in inaccessible sites or harsh environments and multi-sensing. The review comprises briefly the theory of OF elaborated for sensors, techniques of fabrications and analytical results reached with fiber-optic chemical and biological sensors. -

A New Telemetry System for Measuring Core Body Temperature in Livestock and Poultry
A NEW TELEMETRY SYSTEM FOR MEASURING CORE BODY TEMPERATURE IN LIVESTOCK AND POULTRY T. M. Brown–Brandl, T. Yanagi, Jr., H. Xin, R. S. Gates, R. A. Bucklin, G. S. Ross ABSTRACT. Core body temperature is an important physiological measure of animal thermoregulatory responses to environmental stimuli. A new telemetric body temperature measurement system was evaluated by three independent laboratories for its research application in poultry, swine, beef, and dairy cattle. In the case of poultry and swine, the system employs surgeryĈfree temperature sensors that are orally administered to allow short–term monitoring. Computational algorithms were developed and used to filter out spurious data. The results indicate that successful employment of the body–temperature measurement method – telemetric or other measurement systems such as rectal or tympanic method, will depend on the specific application. However, due to the cost of the system, the surgeries involved (in some applications), and the need for filtering of data, careful consideration needs to be given to ensure that telemetry is the ideal method for the experiment protocol. Keywords. Beef cattle, Dairy cattle, Poultry, Swine, Body temperature, Telemetry system. ody temperature is an important parameter for inserted at the same time and can remain functional in the ear assessing animal stress. The most common method for three to five weeks. With these constraints, an improved of body temperature measurement has been method of measuring body temperature continuously for an discrete sampling with a mercury rectal extended time is desirable. thermometer,B and more recently with electronic data loggers. Telemetry systems have been used in wildlife, livestock, Continuous measurements are commonly taken either and medical research for approximately 40 years. -

Pressure 4117, Tide 5217, Wave and Tide 5218
TD 302 OPERATING MANUAL PRESSURE SENSOR 4117/4117R TIDE SENSOR 5217/5217R WAVE & TIDE SENSOR 5217/5217R January 2014 PRESSURE SENSOR 4117/4117R TIDE SENSOR 5217/5217R WAVE AND TIDE SENSOR 5218/5218R Page 2 Aanderaa Data Instruments AS – TD302 1st Edition 30 June 2013 Preliminary 2nd Edition 05 September 2003 New version including general updates in text. Rebranded, Frame Work 3 update, please refer Product change notification AADI Document ID:DA-50009-01, Date: 09 December 2011 (ref Appendix 6 ). 3rd Edition 14 January 2014 New property “Installation Depth” added for Tide sensors, effective version 8.1.1 © Copyright: Aanderaa Data Instruments AS January 2014 - TD 302 Operating Manual for Pressure 4117/4117R Tide 5217/5217R, Wave & Tide 5218/5218R Page 3 Table of Contents Introduction .............................................................................................................................................................. 6 Purpose and scope ................................................................................................................................................ 6 Document overview.............................................................................................................................................. 6 Applicable documents .......................................................................................................................................... 7 Abbreviations ....................................................................................................................................................... -
D3.2 Report on the State of the Art of Connected and Automated Driving In
Ref. Ares(2017)4065840 - 17/08/2017 D3.2 Report on the state of the art of connected and automated driving in Europe (Final) Aachen, 08th July 2017 Authors: Devid Will (ika), Peter Gronerth (ika), Steven von Bargen (NXP) Federico Bianco Levrin (TIM) Giovanna Larini (TIM) Date: 8th July 2017 D3.2 - Report on the state of the art of connected and automated driving in Europe (Final) Document change record Version Date Status Author Description Steven von Bargen 0.1 10/07/2017 Draft Creation of the document ([email protected]) Adding draft version, Steven von Bargen implementing changes to 0.2 10/07/2017 Draft ([email protected]) structure, minor change suggestions Added all remaining Devid Will 0.3 08/08/2017 Draft chapters, conclusion and ([email protected]) editing the document Steven von Bargen Revision of the document 0.4 11/08/2017 Draft ([email protected]) with minor changes Carolin Zachäus Finalisation of the 1.0 15/08/2017 Final (Carolin.Zachaeus@vdi/vde-it.de) document & submission Consortium No Participant organisation name Short Name Country 1 VDI/VDE Innovation + Technik GmbH VDI/VDE-IT DE 2 Renault SAS RENAULT FR 3 Centro Ricerche Fiat ScpA CRF IT 4 BMW Group BMW DE 5 Robert Bosch GmbH BOSCH DE 6 NXP Semiconductors Netherlands BV NXP NL 7 Telecom Italia S.p.A. TIM IT 8 NEC Europe Ltd. NEC UK Rheinisch-Westfälische Technische Hochschule Aachen, 9 RWTH DE Institute for Automotive Engineering Fraunhofer-Gesellschaft zur Förderung der angewandten 10 Forschung e. -

Sensys: a Smartphone-Based Framework for ITS Applications
Old Dominion University ODU Digital Commons Computer Science Theses & Dissertations Computer Science Fall 2017 SenSys: A Smartphone-Based Framework for ITS applications Abdulla Ahmed Alasaadi Old Dominion University, [email protected] Follow this and additional works at: https://digitalcommons.odu.edu/computerscience_etds Part of the Computer Sciences Commons Recommended Citation Alasaadi, Abdulla A.. "SenSys: A Smartphone-Based Framework for ITS applications" (2017). Doctor of Philosophy (PhD), Dissertation, Computer Science, Old Dominion University, DOI: 10.25777/6s3w-1646 https://digitalcommons.odu.edu/computerscience_etds/34 This Dissertation is brought to you for free and open access by the Computer Science at ODU Digital Commons. It has been accepted for inclusion in Computer Science Theses & Dissertations by an authorized administrator of ODU Digital Commons. For more information, please contact [email protected]. SENSYS: A SMARTPHONE-BASED FRAMEWORK FOR ITS APPLICATIONS by Abdulla Ahmed Alasaadi B.Sc. February 2003, University Of Bahrain, Bahrain M.Sc. 2005, Lancaster University, England A Dissertation Submitted to the Faculty of Old Dominion University in Partial Fulfillment of the Requirements for the Degree of DOCTOR OF PHILOSOPHY COMPUTER SCIENCE OLD DOMINION UNIVERSITY December 2017 Approved by: Tamer Nadeem (Director) Kurt Maly (Member) Michele Weigle (Member) Mecit Cetin (Member) ABSTRACT SENSYS: A SMARTPHONE-BASED FRAMEWORK FOR ITS APPLICATIONS Abdulla Ahmed Alasaadi Old Dominion University, 2018 Director: Dr. Tamer Nadeem Intelligent transportation systems (ITS) use different methods to collect and pro- cess traffic data. Conventional techniques suffer from different challenges, like the high installation and maintenance cost, connectivity and communication problems, and the limited set of data. The recent massive spread of smartphones among drivers encouraged the ITS community to use them to solve ITS challenges. -
Ultra1wire3 HSPI User's Guide
Ultra1Wire3 HSPI User’s Guide A HomeSeer HS3 plug-in to monitor temperature and humidity in your home Copyright © 2015 [email protected] Revised 09/27/2015 This document contains proprietary and copyrighted information and may not be copied, reproduced, translated, or reduced to any electronic medium without prior consent, in writing, from [email protected]. Table of Contents Introduction .................................................................................................................................................. 4 Intended Audience .................................................................................................................................... 4 Ultra1Wire3 HSPI Overview .......................................................................................................................... 4 How It Works ............................................................................................................................................ 4 Features .................................................................................................................................................... 4 Example Usage .......................................................................................................................................... 5 Requirements ............................................................................................................................................ 5 Ultra1Wire3 HSPI Installation ...................................................................................................................... -

Radiosonde Systems
Historical Arctic Rawinsonde Archive (HARA) Radiosonde Systems The information in this document has been taken from the following sources: Elliott, W. P., and D. J. Gaffen. 1991. On the utility of radiosonde humidity archives for climate studies. Bulletin American Meteorological Society 72(10): 1507-1520. Garand, L., C. Grassotti, J. Halle, and G. L. Klein. 1992. On differences in radiosonde humidity - reporting practices and their implications for numerical weather prediction and remote sensing.Bulletin American Meteorological Society 73(9):1417-1423. Lally, V. E. 1985. Upper Air in situ Observing Systems. Handbook of Applied Meteorology. David D. Houghton, editor. John Wiley & Sons, Inc. 352 -360. Vaisala Inc. 1989. RS 80 Radiosondes. Upper-Air Systems product information. Reference No. R0422-2. Vaisala Inc., 100 Commerce Way, Woburn, MA 01801. Summary The term "rawinsonde" is often used to describe radiosonde systems that measure winds, along with pressure, temperature and humidity; "rawinsonde" will be used interchangeably with "radiosonde" in the following paragraphs. Radiosondes carry temperature, pressure and relative humidity sensors and report up to six variables: pressure, geopotential height, temperature, dewpoint depression, wind direction and wind speed. While there are many effective instrument designs in use, in the United States, a typical radiosonde configuration consists of a baroswitch that implements a temperature-compensated aneroid capsule to move a lever arm across a commutator plate, a lead-carbonate coated rod thermistor about 0.7 mm in diameter and 1-2 cm long, and a carbon humidity element that swells with a rise in humidity, made of a glass or plastic substrate thinly coated with a fibrous material. -

ICOS Atmosphere Station Specifications
ICOS Atmosphere Station Specifications Edited by O. Laurent Version 2.0 September 2020 Please cite this document as: ICOS RI (2020): ICOS Atmosphere Station Specifications V2.0 (editor: O. Laurent). ICOS ERIC. https://doi.org/10.18160/GK28-2188 Last revision: 22 September 2020 Document History Version Date Actions 1.0 2014-10-18 Creation 1.1 2015-10-21 Add N2O section. Modify boundary layer section. Recommendation on sample drying. Met sensor list update. 1.2 2016-08-09 Modify Boundary layer section. Recommendation on the Short Term Working Standard for short term variability correction (especially for N2O). Add table of the recommended air mixture for the gas tank. Met sensor list update. 1.3 2017-11-15 Include Picarro G5310 for CO and N2O measurement. Recommend the use of dryer for N2O measurement. Recommendation on the instrument inlet pressure. Met sensor list update. 2.0 2020-06-06 Include ARMON radon monitor for radon measurement (section 2.2.6.). Update on the flask sampling specifications (section 2.2.4.) and flask sampling strategy (section 3.1). Include radiocarbon sampling strategy (section 3.2). Include Ecotech Spectronus (FTIR) as a recommended instrument for CO2/CH4/CO/N20 (sections 3.3 and 4.1). Modify recommendations for H2O management and buffer volumes (section 3.3). Update the recommended mole fraction for cylinders (Table 12). Recommendations for O2 measurement (section 5). 2 Contents INTRODUCTION .................................................................................................................................................. -

GNSS / Iot Hardware BSP Box Base Reference Station
GNSS / IoT hardware BSP Box Base reference station Item number: 1111005-1000 2 BSP Link Description Cabinet Indoor rack - 550 x 550 x 150 mm IP20 BSP Link page 6 - 7 Lightning arrestor Bandwidth of protection: 0 kHz - 3,5GHz Test current impulse IZPR: 2,5 kA for impulse of 10/350 μs Connector: N/F-M Attenuation/reflection coefficient in the working bandwidth: better than -0.4 dB/-20 dB Max. residual voltage on the protected output with IZRP applied: < ± 100 Vp-p, for tZRP >250ns Power supply battery AGM 12V/12Ah Backup time (without GNSS receiver) ~ 20 hours Operating temperature: 0° - 50° C Gigabit ethernet overvoltage protection Maximum discharge current (8/20 μs) line-line: 30 A Maximum discharge current (8/20 μs) line-PE: 10 kA Response time line-line: 1 ns Response time line-PE: 100 ns Voltage protection level line-line: < 15 V Voltage protection level line-PE (1kV/μs): < 600 V Notice This box is recommended for indoor solution. The batteries need ventilation of the air. BSP Box supplied without GNSS receiver. Integrated GNSS receiver is optional. 33 xBase GNSS receiver with advanced functionality Item number: 1101007-1001 4 Description Connectivity: Ethernet, LTE modem Dual SIM Interface: RS232, RS485, CAN, USB, Digital/Analog Inputs/Outputs, Relay Outputs, PPS (Pulse Per Second) Features: SD storage, USB storage, WiFi*, BlueTooth*, VPN, Network Load Balancing Electrical: Input voltage: 7-28VDC; Power consumption: < 7W GSM: LTE FDD: B1/B3/B7/B8/B20/B28A WCDMA: B1/B8 GSM: 900 / 1800 MHz GNSS: Channels: 226 channels with universal tracking -

Review of Low-Cost Sensors for the Ambient Air Monitoring of Benzene and Other Volatile Organic Compounds
Review of low-cost sensors for the ambient air monitoring of benzene and other volatile organic compounds Spinelle L., Gerboles M., Kok G. and Sauerwald T. 2015 EUR 27713 This publication is a Technical report by the Joint Research Centre (JRC), the European Commission’s science and knowledge service. It aims to provide evidence-based scientific support to the European policymaking process. The scientific output expressed does not imply a policy position of the European Commission. Neither the European Commission nor any person acting on behalf of the Commission is responsible for the use that might be made of this publication. JRC Science Hub https://ec.europa.eu/jrc JRC98368 EUR 27713 PDF ISBN 978-92-79-54644-0 ISSN 1831-9424 doi: 10.2788/05768 Luxembourg: Publications Office of the European Union, 2015 © European Union, 2015 The reuse of the document is authorised, provided the source is acknowledged and the original meaning or message of the texts are not distorted. The European Commission shall not be held liable for any consequences stemming from the reuse. How to cite this report: L. Spinelle, M. Gerboles, G. Kok and T. Sauerwald; Review of low-cost sensors for the ambient air monitoring of benzene and other volatile organic compounds; EUR 27713; doi: 10.2788/05768 All images © European Union 2015 Review of low-cost sensors for the ambient air monitoring of benzene and other volatile organic compounds ENV56 KEY-VOCs Metrology for VOC indicators in air pollution and climate change Literature and market review of low-cost sensors for the monitoring of benzene and other volatile organic compounds in ambient air for regulatory purposes Deliverable number: 4.1.1 Version: Final Date: September 2015 Task 4.1: Review of the state of the art of sensor based air quality monitoring L.