A Concept Study for Extraterrestrial Sea Exploration of Titan Via Deployable and Versatile Instrument Device (David) Buoys
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Islamic Traditions of Cirebon
the islamic traditions of cirebon Ibadat and adat among javanese muslims A. G. Muhaimin Department of Anthropology Division of Society and Environment Research School of Pacific and Asian Studies July 1995 Published by ANU E Press The Australian National University Canberra ACT 0200, Australia Email: [email protected] Web: http://epress.anu.edu.au National Library of Australia Cataloguing-in-Publication entry Muhaimin, Abdul Ghoffir. The Islamic traditions of Cirebon : ibadat and adat among Javanese muslims. Bibliography. ISBN 1 920942 30 0 (pbk.) ISBN 1 920942 31 9 (online) 1. Islam - Indonesia - Cirebon - Rituals. 2. Muslims - Indonesia - Cirebon. 3. Rites and ceremonies - Indonesia - Cirebon. I. Title. 297.5095982 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system or transmitted in any form or by any means, electronic, mechanical, photocopying or otherwise, without the prior permission of the publisher. Cover design by Teresa Prowse Printed by University Printing Services, ANU This edition © 2006 ANU E Press the islamic traditions of cirebon Ibadat and adat among javanese muslims Islam in Southeast Asia Series Theses at The Australian National University are assessed by external examiners and students are expected to take into account the advice of their examiners before they submit to the University Library the final versions of their theses. For this series, this final version of the thesis has been used as the basis for publication, taking into account other changes that the author may have decided to undertake. In some cases, a few minor editorial revisions have made to the work. The acknowledgements in each of these publications provide information on the supervisors of the thesis and those who contributed to its development. -
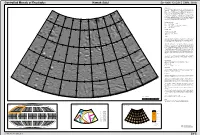
Hi-Resolution Map Sheet
Controlled Mosaic of Enceladus Hamah Sulci Se 400K 43.5/315 CMN, 2018 GENERAL NOTES 66° 360° West This map sheet is the 5th of a 15-quadrangle series covering the entire surface of Enceladus at a 66° nominal scale of 1: 400 000. This map series is the third version of the Enceladus atlas and 1 270° West supersedes the release from 2010 . The source of map data was the Cassini imaging experiment (Porco et al., 2004)2. Cassini-Huygens is a joint NASA/ESA/ASI mission to explore the Saturnian 350° system. The Cassini spacecraft is the first spacecraft studying the Saturnian system of rings and 280° moons from orbit; it entered Saturnian orbit on July 1st, 2004. The Cassini orbiter has 12 instruments. One of them is the Cassini Imaging Science Subsystem 340° (ISS), consisting of two framing cameras. The narrow angle camera is a reflecting telescope with 290° a focal length of 2000 mm and a field of view of 0.35 degrees. The wide angle camera is a refractor Samad with a focal length of 200 mm and a field of view of 3.5 degrees. Each camera is equipped with a 330° 300° large number of spectral filters which, taken together, span the electromagnetic spectrum from 0.2 60° 320° 310° to 1.1 micrometers. At the heart of each camera is a charged coupled device (CCD) detector 60° consisting of a 1024 square array of pixels, each 12 microns on a side. MAP SHEET DESIGNATION Peri-Banu Se Enceladus (Saturnian satellite) 400K Scale 1 : 400 000 43.5/315 Center point in degrees consisting of latitude/west longitude CMN Controlled Mosaic with Nomenclature Duban 2018 Year of publication IMAGE PROCESSING3 Julnar Ahmad - Radiometric correction of the images - Creation of a dense tie point network 50° - Multiple least-square bundle adjustments 50° - Ortho-image mosaicking Yunan CONTROL For the Cassini mission, spacecraft position and camera pointing data are available in the form of SPICE kernels. -

Why They Died Civilian Casualties in Lebanon During the 2006 War
September 2007 Volume 19, No. 5(E) Why They Died Civilian Casualties in Lebanon during the 2006 War Map: Administrative Divisions of Lebanon .............................................................................1 Map: Southern Lebanon ....................................................................................................... 2 Map: Northern Lebanon ........................................................................................................ 3 I. Executive Summary ........................................................................................................... 4 Israeli Policies Contributing to the Civilian Death Toll ....................................................... 6 Hezbollah Conduct During the War .................................................................................. 14 Summary of Methodology and Errors Corrected ............................................................... 17 II. Recommendations........................................................................................................ 20 III. Methodology................................................................................................................ 23 IV. Legal Standards Applicable to the Conflict......................................................................31 A. Applicable International Law ....................................................................................... 31 B. Protections for Civilians and Civilian Objects ...............................................................33 -

Mcleods0809.Pdf (15.34Mb)
ISOSTATICALLY COMPENSATED EXTENSIONAL TECTONICS ON ENCELADUS by Scott Stuart McLeod A thesis submitted in partial fulfillment of the requirements for the degree of Master of Science in Earth Sciences MONTANA STATE UNIVERSITY Bozeman, Montana May 2009 ©COPYRIGHT by Scott Stuart McLeod 2009 All Rights Reserved ii APPROVAL of a thesis submitted by Scott Stuart McLeod This thesis has been read by each member of the thesis committee and has been found to be satisfactory regarding content, English usage, format, citation, bibliographic style, and consistency, and is ready for submission to the Division of Graduate Education. David R. Lageson Approved for the Department of Earth Sciences Stephan G. Custer Approved for the Division of Graduate Education Dr. Carl A. Fox iii STATEMENT OF PERMISSION TO USE In presenting this thesis in partial fulfillment of the requirements for a master’s degree at Montana State University, I agree that the Library shall make it available to borrowers under rules of the Library. If I have indicated my intention to copyright this thesis by including a copyright notice page, copying is allowable only for scholarly purposes, consistent with “fair use” as prescribed in the U.S. Copyright Law. Requests for permission for extended quotation from or reproduction of this thesis in whole or in parts may be granted only by the copyright holder. Scott Stuart McLeod May 2009 iv DEDICATION I dedicate this work to my parents, Grace and Rodney McLeod, for their tireless enthusiasm, encouragement and support, and to my friends and colleagues who never stopped believing in me – you know who you are. -

The Book of the Thousand Nights and a Night – Volume 10
THE BOOK OF THE THOUSAND NIGHTS AND A NIGHT A Plain and Literal Translation of the Arabian Nights Entertainments by Richard F. Burton VOLUME TEN The Dunyazad Digital Library www.dunyazad-library.net The Book Of The Thousand Nights And A Night A Plain and Literal Translation of the Arabian Nights Entertainments by Richard F. Burton First published 1885–1888 Volume Ten The Dunyazad Digital Library www.dunyazad-library.net The Dunyazad Digital Library (named in honor of Shahrazad’s sister) is based in Austria. According to Austrian law, the text of this book is in the public domain (“gemeinfrei”), since all rights expire 70 years after the author’s death. If this does not apply in the place of your residence, please respect your local law. However, with the exception of making backup or printed copies for your own personal use, you may not copy, forward, reproduce or by any means publish this e- book without our previous written consent. This restriction is only valid as long as this e-book is available at the www.dunyazad-library.net website. This e-book has been carefully edited. It may still contain OCR or transcription errors, but also intentional deviations from the available printed source(s) in typog- raphy and spelling to improve readability or to correct obvious printing errors. A Dunyazad Digital Library book Selected, edited and typeset by Robert Schaechter First published November 2014 Release 1.0 · November 2014 2 To His Excellency Yacoub Artin Pasha, Minister of Instruction, etc. etc. etc. Cairo. My Dear Pasha, During the last dozen years, since we first met at Cairo, you have done much for Egyptian folk-lore and you can do much more. -
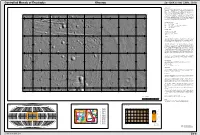
Hi-Resolution Map Sheet
Controlled Mosaic of Enceladus Khusrau Se 400K 0/180 CMN, 2018 GENERAL NOTES This map sheet is the 8th of a 15-quadrangle series covering the entire surface of Enceladus at a nominal scale of 1: 400 000. This map series is the third version of the Enceladus atlas and supersedes the release from 20101. The source of map data was the Cassini imaging experiment (Porco et al., 2004)2. Cassini-Huygens is a joint NASA/ESA/ASI mission to explore the Saturnian system. The Cassini spacecraft is the first spacecraft studying the Saturnian system of rings and 216° West 210° 200° 190° 180° 170° 160° 150° 144° West moons from orbit; it entered Saturnian orbit on July 1st, 2004. The Cassini orbiter has 12 instruments. One of them is the Cassini Imaging Science Subsystem 22° 22° (ISS), consisting of two framing cameras. The narrow angle camera is a reflecting telescope with a focal length of 2000 mm and a field of view of 0.35 degrees. The wide angle camera is a refractor with a focal length of 200 mm and a field of view of 3.5 degrees. Each camera is equipped with a large number of spectral filters which, taken together, span the electromagnetic spectrum from 0.2 20° 20° to 1.1 micrometers. At the heart of each camera is a charged coupled device (CCD) detector consisting of a 1024 square array of pixels, each 12 microns on a side. MISR SULCI MAP SHEET DESIGNATION Se Enceladus (Saturnian satellite) 400K Scale 1 : 400 000 0/180 Center point in degrees consisting of latitude/west longitude CMN Controlled Mosaic with Nomenclature 2018 Year of publication IMAGE PROCESSING3 A - Radiometric correction of the images L - - Creation of a dense tie point network Y A - Multiple least-square bundle adjustments M A - Ortho-image mosaicking N 10° S U 10° L C I CONTROL For the Cassini mission, spacecraft position and camera pointing data are available in the form of SPICE kernels. -

Controlled Mosaic of Enceladus Se 500K -90/0 CMN, 2010 Damascus Sulcus Se-15
Controlled Mosaic of Enceladus Damascus Sulcus Se 500K -90/0 CMN, 2010 GENERAL NOTES ° 0 This map sheet is the 15th of a 15-quadrangle series covering the entire surface of Enceladus at a nominal scale of 1: 500 000. The source of map data was the Cassini imaging experiment (Porco et al., 2004)1,2. Cassini-Huygens is a joint NASA/ESA/ASI mission to explore the Saturnian system. 330° The Cassini spacecraft is the first spacecraft studying the Saturnian system of rings ° 30 and moons from orbit; it entered Saturnian orbit on July 1st, 2004. The Cassini orbiter has 12 instruments. One of them is the Cassini Imaging Science Subsystem (ISS), consisting of two framing cameras. The narrow angle camera is a reflecting telescope with a focal length of 2000 mm and a field of view of 0.35 degrees. The wide angle camera is a refractor with a focal length of 200 mm and a field of view of 3.5 degrees. Each camera is equipped with a large number of spectral filters which, taken together, span the electromagnetic spectrum from 0.2 to 1.1 micrometers. At the heart of each camera is a charged coupled device (CCD) detector consisting of a 1024 square array of pixels, each 12 microns on a side. D A MAP SHEET DESIGNATION M Se Enceladus (Saturnian satellite) 500K Scale 1 : 500 000 A -90/0 Center point in degrees consisting of latitude/west longitude 300° S CMN Controlled Mosaic with Nomenclature 60° B 2010 Year of publication C A G U IMAGE PROCESSING3 H S D - Radiometric correction - Geometric correction A - Photogrammetric adjustment using least-square and limb-fitting techniques C D - Map projection - Photometric correction using the Hapke bidirectional reflectance function A - Processing of the mosaic I R CONTROL O For the Cassini mission, spacecraft position and camera pointing data are available in the form of SPICE kernels. -

Saddam's Generals: Perspectives of the Iran-Iraq
SADDAM’S GENERALS Perspectives of the Iran-Iraq War Kevin M. Woods, Williamson Murray, Elizabeth A. Nathan, Laila Sabara, Ana M. Venegas SADDAM’S GENERALS SADDAM’S GENERALS Perspectives of the Iran-Iraq War Kevin M. Woods, Williamson Murray, Elizabeth A. Nathan, Laila Sabara, Ana M. Venegas Institute for Defense Analyses 2011 Final July 2010 IDA Document D-4121 Log: H 10-000765/1 Copy This work was conducted under contract DASW01-04-C-003, Task ET-8-2579, “Study on Military History (Project 1946—Phase II)” for the National Intelligence Council. The publication of this IDA document does not indicate endorsement by the Department of Defense, nor should the contents be construed as reflecting the official position of the Agency. © 2010 Institute for Defense Analyses, 4850 Mark Center Drive, Alexandria, Virginia 22311-1882 • (703) 845-2000. This material may be reproduced by or for the U.S. Government pursuant to the copyright license under the clause at DFARS 252.227-7013 (November 1995). Contents Foreword............................................................................................................................................ vii Introduction.......................................................................................................................................... 1 Summary and Analysis........................................................................................................................ 5 Background .................................................................................................................................. -

Principle of Hope. Vol. 2
Page i THE PRINCIPLE OF HOPE Page ii Studies in Contemporary German Social Thought (partial list) Thomas McCarthy, General Editor Theodor W. Adorno, Hegel: Three Studies Theodor W. Adorno, Prisms Seyla Benhabib, Wolfgang Bonß and John McCole, editors, On Max Horkheimer: New Perspectives Ernst Bloch, Natural Law and Human Dignity Ernst Bloch, The Principle of Hope Ernst Bloch, The Utopian Function of Art and Literature: Selected Essays Hans Blumenberg, The Genesis of the Copernican World Hans Blumenberg, The Legitimacy of the Modern Age Hans Blumenberg, Work on Myth Susan BuckMorss, The Dialectics of Seeing: Walter Benjamin and the Arcades Project Jürgen Habermas, On the Logic of the Social Sciences Jürgen Habermas, The New Conservatism: Cultural Criticism and the Historians' Debate Jürgen Habermas, The Philosophical Discourse of Modernity: Twelve Lectures Jürgen Habermas, PhilosophicalPolitical Profiles Jürgen Habermas, Postmetaphysical Thinking: Philosophical Essays Jürgen Habermas, The Structural Transformation of the Public Sphere: An Inquiry into a Category of Bourgeois Society Axel Honneth, The Critique of Power: Reflective Stages in a Critical Social Theory Max Horkheimer, Between Philosophy and Social Science: Selected Early Writings Pierre Missac, Walter Benjamin's Passages Guy Oakes, Weber and Rickert: Concept Formation in the Cultural Sciences William E. Scheuerman, Between the Norm and the Exception: The Frankfurt School and the Rule of Law Dennis Schmidt, The Ubiquity of the Finite: Hegel, Heidegger, and the Entitlements -

Department of the Treasury Office of Foreign Assets Control
Thursday, July 1, 2010 Part III Department of the Treasury Office of Foreign Assets Control 31 CFR Chapter V Alphabetical Listing of Blocked Persons, Blocked Vessels, Specially Designated Nationals, Specially Designated Terrorists, Specially Designated Global Terrorists, Foreign Terrorist Organizations, and Specially Designated Narcotics Traffickers; Final Rule VerDate Mar<15>2010 16:15 Jun 30, 2010 Jkt 220001 PO 00000 Frm 00001 Fmt 4717 Sfmt 4717 E:\FR\FM\01JYR2.SGM 01JYR2 mstockstill on DSKH9S0YB1PROD with RULES2 38212 Federal Register / Vol. 75, No. 126 / Thursday, July 1, 2010 / Rules and Regulations DEPARTMENT OF THE TREASURY persons, blocked vessels, specially Register and the most recent version of designated nationals, specially the SDN List posted on OFAC’s Web site Office of Foreign Assets Control designated terrorists, specially for updated information on designations designated global terrorists, foreign and blocking actions before engaging in 31 CFR Chapter V terrorist organizations, and specially transactions that may be prohibited by designated narcotics traffickers whose the economic sanctions programs Alphabetical Listing of Blocked property and interests in property are administered by OFAC. Please note that Persons, Blocked Vessels, Specially blocked pursuant to the various some OFAC sanctions programs prohibit Designated Nationals, Specially economic sanctions programs transactions involving persons and Designated Terrorists, Specially administered by the Department of the vessels not identified on Appendix A to Designated Global Terrorists, Foreign Treasury’s Office of Foreign Assets 31 CFR chapter V or other lists provided Terrorist Organizations, and Specially Control (‘‘OFAC’’). OFAC is hereby by OFAC. Designated Narcotics Traffickers amending and republishing Appendix A This amendment reflects the names of AGENCY: Office of Foreign Assets in its entirety to include or delete, as persons and vessels identified on Control, Treasury. -

Terrorism Sanctions Regulations (Title 31 Part 595 of the U.S
Executive Order 13224 blocking Terrorist Property and a summary of the Terrorism Sanctions Regulations (Title 31 Part 595 of the U.S. Code of Federal Regulations), Terrorism List Governments Sanctions Regulations (Title 31 Part 596 of the U.S. Code of Federal Regulations), and Foreign Terrorist Organizations Sanctions Regulations (Title 31 Part 597 of the U.S. Code of Federal Regulations) EXECUTIVE ORDER 13224 - BLOCKING PROPERTY AND PROHIBITING TRANSACTIONS WITH PERSONS WHO COMMIT, THREATEN TO COMMIT, OR SUPPORT TERRORISM By the authority vested in me as President by the Constitution and the laws of the United States of America, including the International Emergency Economic Powers Act (50 U.S.C. 1701 et seq.)(IEEPA), the National Emergencies Act (50 U.S.C. 1601 et seq.), section 5 of the United Nations Participation Act of 1945, as amended (22 U.S.C. 287c) (UNPA), and section 301 of title 3, United States Code, and in view of United Nations Security Council Resolution (UNSCR) 1214 of December 8, 1998, UNSCR 1267 of October 15, 1999, UNSCR 1333 of December 19, 2000, and the multilateral sanctions contained therein, and UNSCR 1363 of July 30, 2001, establishing a mechanism to monitor the implementation of UNSCR 1333, I, GEORGE W. BUSH, President of the United States of America, find that grave acts of terrorism and threats of terrorism committed by foreign terrorists, including the terrorist attacks in New York, Pennsylvania, and the Pentagon committed on September 11, 2001, acts recognized and condemned in UNSCR 1368 of September 12, 2001, and UNSCR 1269 of October 19, 1999, and the continuing and immediate threat of further attacks on United States nationals or the United States constitute an unusual and extraordinary threat to the national security, foreign policy, and economy of the United States, and in furtherance of my proclamation of September 14, 2001, Declaration of National Emergency by Reason of Certain Terrorist Attacks, hereby declare a national emergency to deal with that threat. -

The Book of the Thousand Nights and a Night, Volume 10 by Richard F
The Book of the Thousand Nights and a Night, Volume 10 by Richard F. Burton The Book of the Thousand Nights and a Night, Volume 10 by Richard F. Burton This etext was scanned by JC Byers (http://www.capitalnet.com/~jcbyers/index.htm) and proofread by JC Byers, Muhammad Hozien, K. C. McGuire, Renate Preuss, Robert Sinton, and Mats Wernersson. THE BOOK OF THE THOUSAND NIGHTS AND A NIGHT A Plain and Literal Translation of the Arabian Nights Entertainments Translated and Annotated by Richard F. Burton VOLUME TEN To His Excellency Yacoub Artin Pasha, page 1 / 703 Minister of Instruction, Etc. Etc. Etc. Cairo. My Dear Pasha, During the last dozen years, since we first met at Cairo, you have done much for Egyptian folk-lore and you can do much more. This volume is inscribed to you with a double purpose; first it is intended as a public expression of gratitude for your friendly assistance; and, secondly, as a memento that the samples which you have given us imply a promise of further gift. With this lively sense of favours to come I subscribe myself Ever yours friend and fellow worker, Richard F. Burton London, July 12, 1886. Contents of the Tenth Volume 169. Ma'aruf the Cobbler and His Wife Fatimah Conclusion Terminal Essay Appendix I.-- 1. Index to the Tales and Proper Names 2. Alphabetical Table of the Notes (Anthropological, &c.) page 2 / 703 3. Alphabetical Table of First lines-- a. English b. Arabic 4. Table of Contents of the Various Arabic Texts-- a. The Unfinished Calcutta Edition (1814-1818) b.