Radar Systems Engineering
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Spectrum Management Technical Handbook
NTIA TN 89-2 SPECTRUM MANAGEMENT TECHNICAL HANDBOOK TECHNICAL NOTE SERIES NTIA TECHNICAL NOTE 89-2 SPECTRUM MANAGEMENT TECHNICAL HANDBOOK l U.S. DEPARTMENT OF COMMERCE Robert A. Mosbacher, Secretary Alfred C. Sikes, Assistant Secretary for Communications and Information JULY 1989 ACKNOWLEDGEMENT NT IA acknowledges the efforts of Mark Schellhammer in the completion of Phase I of this handbook (Sections 1-3). Other portions will be added as resources are available. ABSTRACT This handbook is a compilation of the procedures, definitions, relationships and conversions essential to electromagnetic compatibility analysis. It is intended as a reference for NTIA engineers. KEY WORDS CONVERSION FACTORS COUPLING EQUATIONS DEFINITIONS ·TECHNICAL RELATIONSHIPS iii TABLE OF CONTENTS Subsection Page SECTION 1 TECHNICAL TERMS:DEFINITIONS AND NOTATION TERMS AND DEFINITIONS . .. .. 1-1 GLOSSARY OF STANDARD NOTATION . .. 1-13 SECTION 2 TECHNICAL RELATIONSHIPS AND CONVERSION FACTORS INTRODUCTION . .. .. .. 2-1 TRANSMISSION LOSS FOR RADIO LINKS . �. .. .. 2-1 Propagation Loss . .. .. .. 2-1 Transmission Loss ........................................ 2-2 Free-Space Basic Transmission Loss .......................... 2-2 Basic Transmission Loss .................................... 2-2 Loss Relative to Free-Space .................................. 2-2 System Loss . .. 2-3 ; Total Loss . .. .. 2-3 ANTENNA CHARACTERISTICS . .. 2-3 Antenna Directivity ........................................ 2-3 Antenna Gain and Efficiency .................................. 2-3 I -
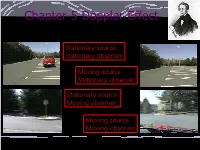
Chapter-5 Doppler Effect
Chapter-5 Doppler Effect Stationary source Stationary observer Moving source Stationary observer Stationary source Moving observer Moving source Moving observer http://www.astro.ubc.ca/~scharein/a311/Sim/doppler/Doppler.html Doppler Effect The Doppler effect is the apparent change in the frequency of a wave motion when there is relative motion between the source of the waves and the observer. The apparent change in frequency f experienced as a result of the Doppler effect is known as the Doppler shift. The value of the Doppler shift increases as the relative velocity v between the source and the observer increases. The Doppler effect applies to all forms of waves. Doppler Effect (Moving Source) http://www.absorblearning.com/advancedphysics/demo/units/040103.html Suppose the source moves at a steady velocity vs towards a stationary observer. The source emits sound wave with frequency f. From the diagram, we can see that the distance between crests is shortened such that ' vs Since = c/f and = 1/f, We get c c v s f ' f f c vs f ' ( ) f c vs Doppler Effect (Moving Observer) Consider an observer moving with velocity vo toward a stationary source S. The source emits a sound wave with frequency f and wavelength = c/f. The velocity of the sound wave relative to the observer is c + vo. c Doppler Shift Consider a source moving towards an observer, the Doppler shift f is c f f ' f ( ) f f c vs f v s f c v s f v If v <<c, then we get s s f c The above equation also applies to a receding source, with vs taking as negative. -

Waveform Design and Related Processing for Multiple Target Detection and Resolution Target Detection and Resolution
DOI: 10.5772/intechopen.71549 Chapter 1 Provisional chapter Waveform Design and Related Processing for Multiple Waveform Design and Related Processing for Multiple Target Detection and Resolution Target Detection and Resolution Gaspare Galati and Gabriele Pavan Gaspare Galati and Gabriele Pavan Additional information is available at the end of the chapter Additional information is available at the end of the chapter http://dx.doi.org/10.5772/intechopen.71549 Abstract The performance of modern radar systems mostly depends on the radiated wave- forms, whose design is the basis of the entire system design. Today’s coherent, solid- state radars (either of the phased array type or of the single-radiator type as air traffic control or marine radars) transmit a set of deterministic signals with relatively large duty cycles, an order of 10%, calling for pulse compression to get the required range resolution. Often, power budget calls for different pulse lengths (e.g., short, medium, and long waveforms with a rectangular envelope) to cover the whole radar range. The first part of the chapter includes the topic of mitigating the effect of unwanted side lobes, inherent to every pulse compression, which is achieved both by a careful and optimal design of the waveform and by a (possibly mismatched) suitable processing. The second part of the chapter deals with the novel noise radar technology, not yet used in commercial radar sets but promising: (1) to prevent radar interception and exploitation by an enemy part and (2) to limit the mutual interferences of nearby radars, as in the marine environment. In this case, the design includes a tailoring of a set of pseudo-random waveforms, generally by recursive processing, to comply with the system requirements. -

Electronic Warfare Fundamentals
ELECTRONIC WARFARE FUNDAMENTALS NOVEMBER 2000 PREFACE Electronic Warfare Fundamentals is a student supplementary text and reference book that provides the foundation for understanding the basic concepts underlying electronic warfare (EW). This text uses a practical building-block approach to facilitate student comprehension of the essential subject matter associated with the combat applications of EW. Since radar and infrared (IR) weapons systems present the greatest threat to air operations on today's battlefield, this text emphasizes radar and IR theory and countermeasures. Although command and control (C2) systems play a vital role in modern warfare, these systems are not a direct threat to the aircrew and hence are not discussed in this book. This text does address the specific types of radar systems most likely to be associated with a modern integrated air defense system (lADS). To introduce the reader to EW, Electronic Warfare Fundamentals begins with a brief history of radar, an overview of radar capabilities, and a brief introduction to the threat systems associated with a typical lADS. The two subsequent chapters introduce the theory and characteristics of radio frequency (RF) energy as it relates to radar operations. These are followed by radar signal characteristics, radar system components, and radar target discrimination capabilities. The book continues with a discussion of antenna types and scans, target tracking, and missile guidance techniques. The next step in the building-block approach is a detailed description of countermeasures designed to defeat radar systems. The text presents the theory and employment considerations for both noise and deception jamming techniques and their impact on radar systems. -

A Novel Ship Target Detection Algorithm Based on Error Self-Adjustment Extreme Learning Machine and Cascade Classifier
Cognitive Computation (2019) 11:110–124 https://doi.org/10.1007/s12559-018-9606-5 A Novel Ship Target Detection Algorithm Based on Error Self-adjustment Extreme Learning Machine and Cascade Classifier Wandong Zhang1,2 · Qingzhong Li1 · Q. M. Jonathan Wu2 · Yimin Yang3 · Ming Li1 Received: 30 June 2018 / Accepted: 10 October 2018 / Published online: 24 October 2018 © Springer Science+Business Media, LLC, part of Springer Nature 2018 Abstract High-frequency surface wave radar (HFSWR) has a vital civilian and military significance for ship target detection and tracking because of its wide visual field and large sea area coverage. However, most of the existing ship target detection methods of HFSWR face two main difficulties: (1) the received radar signals are strongly polluted by clutter and noises, and (2) it is difficult to detect ship targets in real-time due to high computational complexity. This paper presents a ship target detection algorithm to overcome the problems above by using a two-stage cascade classification structure. Firstly, to quickly obtain the target candidate regions, a simple gray-scale feature and a linear classifier were applied. Then, a new error self-adjustment extreme learning machine (ES-ELM) with Haar-like input features was adopted to further identify the target precisely in each candidate region. The proposed ES-ELM includes two parts: initialization part and updating part. In the former stage, the L1 regularizer process is adopted to find the sparse solution of output weights, to prune the useless neural nodes and to obtain the optimal number of hidden neurons. Also, to ensure an excellent generalization performance by the network, in the latter stage, the parameters of hidden layer are updated through several iterations using L2 regularizer process with pulled back error matrix. -

Transmitter T (X) Channel E (X) Receiver R
Analog Communication ( 10EC53 ) Introduction The function of the communication system is to make available at the destination a signal originating at a distant point. This signal is called the desired signal. Unfortunately, during the passage of the signal through the channel and front-end of the receiver, this desired signal gets corrupted by a number of undesired signals. This is referred to as Noise. Noise is any unknown or unwanted signal. Noise is the static you hear in the speaker when you tune any AM or FM receiver to any position between stations. It is also the snow or confetti that is visible on a TV screen. The received signal is modeled as r (t) = s (t) + n (t) Where s (t) is the transmitted/desired signal n (t) is the additive noise/unwanted signal The signal n (t) gets added at the channel. It disturbs the transmission and processing of signal in Communication System. Over which one cannot have a control. In general term it is an unwanted signal that affects a wanted signal. It is a random signal that cannot be represented with a simple equation. But some time can be deterministic components (power supply hum, certain oscillations).Deterministic Components can be eliminated by proper shielding and introduction of notch filters. If their were no noise perfect communication would be possible with minimum transmitted power. At the receiver only amplification of the signal power to the desired level is required. If R (x)=T (x) then e (x)=0 Transmitter Receiver T (x) R (x) If R (x) ≠ T (x) then e (x) ≠ 0.The received signal is corrupted. -
Demodulation, Bit-Error Probability and Diversity Arrangements
RADIO SYSTEMS – ETIN15 Lecture no: 6 Demodulation, bit-error probability and diversity arrangements Anders J Johansson, Department of Electrical and Information Technology [email protected] 5 April 2017 1 Contents • Receiver noise calculations [Covered briefly in Chapter 3 of textbook!] • Optimal receiver and bit error probability – Principle of maximum-likelihood receiver – Error probabilities in non-fading channels – Error probabilities in fading channels • Diversity arrangements – The diversity principle – Types of diversity – Spatial (antenna) diversity performance 5 April 2017 2 RECEIVER NOISE 5 April 2017 3 Receiver noise Noise sources The noise situation in a receiver depends on several noise sources Noise picked up Wanted by the antenna signal Output signal Analog Detector with requirement circuits on quality Thermal noise 5 April 2017 4 Receiver noise Equivalent noise source To simplify the situation, we replace all noise sources with a single equivalent noise source. Wanted How do we determine Noise free signal N from the other sources? N Output signal C Analog Detector with requirement circuits on quality Noise free Same “input quality”, signal-to-noise ratio, C/N in the whole chain. 5 April 2017 5 Receiver noise Examples • Thermal noise is caused by random movements of electrons in circuits. It is assumed to be Gaussian and the power is proportional to the temperature of the material, in Kelvin. • Atmospheric noise is caused by electrical activity in the atmosphere, e.g. lightning. This noise is impulsive in its nature and below 20 MHz it is a dominating. • Cosmic noise is caused by radiation from space and the sun is a major contributor. -

The Montague Doppler Radar, an Overview June 2018
ISSUE PAPER SERIES The Montague Doppler Radar, An Overview June 2018 NEW YORK STATE TUG HILL COMMISSION DULLES STATE OFFICE BUILDING · 317 WASHINGTON STREET · WATERTOWN, NY 13601 · (315) 785-2380 · WWW.TUGHILL.ORG The Tug Hill Commission Technical and Issue Paper Series are designed to help local officials and citizens in the Tug Hill region and other rural parts of New York State. The Tech- nical Paper Series provides guidance on procedures based on questions frequently received by the Commis- sion. The Issue Paper Series pro- vides background on key issues facing the region without taking advocacy positions. Other papers in each se- ries are available from the Tug Hill Commission. Please call us or vis- it our website for more information. The Montague Doppler Weather Radar, An Overview Table of Contents Introduction .................................................................................................................................................. 1 Who owns the Montague radar? ................................................................................................................. 1 Who uses the Montague radar? .................................................................................................................. 1 How does the radar system work? .............................................................................................................. 2 How does the radar predict lake-effect snowstorms? ................................................................................ 2 How does the -

A Pulse Compression Waveform for Improved-Sensitivity Weather Radar Observations
DECEMBER 2014 K U R D Z O E T A L . 2713 A Pulse Compression Waveform for Improved-Sensitivity Weather Radar Observations JAMES M. KURDZO School of Meteorology, and Advanced Radar Research Center, University of Oklahoma, Norman, Oklahoma BOON LENG CHEONG Advanced Radar Research Center, University of Oklahoma, Norman, Oklahoma ROBERT D. PALMER AND GUIFU ZHANG School of Meteorology, and Advanced Radar Research Center, University of Oklahoma, Norman, Oklahoma JOHN B. MEIER Advanced Radar Research Center, University of Oklahoma, Norman, Oklahoma (Manuscript received 22 January 2013, in final form 9 September 2014) ABSTRACT The progression of phased array weather observations, research, and planning over the past decade has led to significant advances in development efforts for future weather radar technologies. However, numerous challenges still remain for large-scale deployment. The eventual goal for phased array weather radar tech- nology includes the use of active arrays, where each element would have its own transmit/receive module. This would lead to significant advantages; however, such a design must be capable of utilizing low-power, solid-state transmitters at each element in order to keep costs down. To provide acceptable sensitivity, as well as the range resolution needed for weather observations, pulse compression strategies are required. Pulse compression has been used for decades in military applications, but it has yet to be applied on a broad scale to weather radar, partly because of concerns regarding sensitivity loss caused by pulse windowing. A robust optimization technique for pulse compression waveforms with minimalistic windowing using a genetic al- gorithm is presented. A continuous nonlinear frequency-modulated waveform that takes into account transmitter distortion is shown, both in theory and in practical use scenarios. -

Signal to Noise Ratio (SNR Or S/N) SNR Is the Ratio of the Signal Power to Noise Power
JAWAHARLAL NEHRU TECHNOLOGICAL UNIVERSITY KAKINADA KAKINADA – 533 001 , ANDHRA PRADESH GATE Coaching Classes as per the Direction of Ministry of Education GOVERNMENT OF ANDHRA PRADESH Analog Communication 26-05-2020 to 06-07-2020 Prof. Ch. Srinivasa Rao Dept. of ECE, JNTUK-UCE Vizianagaram Analog Communication-Day 7, 01-06-2020 Presentation Outline Noise: • Noise and its types • Thermal Noise • Parameters of Noise • Noise in Baseband Communication systems • Gaussian process and NB Noise • Problems 02-06-2020 Prof.Ch.Srinivasa Rao, JNTUK UCEV 2 Learning Outcomes • At the end of this Session, Student will be able to: • LO 1 : Fundamental aspects of Noise • LO 2 : Different Noise types and its Paraneters • LO 3 : Gaussian Process and ND Noise 02-06-2020 Prof.Ch.Srinivasa Rao, JNTUK UCEV 3 Noise Definitions of Noise: • Noise is unwanted signal that affects wanted signal. • Noise can broadly be defined as any unknown signal that affects the recovery of the desired signal. • Noise is an unwanted signal, which interferes with the original message signal and corrupts the parameters of the message signal. This alteration in the communication process, leads to the message getting altered. It most likely enters at the channel or the receiver. Effect of noise • Degrades system performance (Analog and digital) • Receiver cannot distinguish signal from noise • Efficiency of communication system reduces Most common examples of noise are: • Hiss sound in radio receivers • Buzz sound amidst of telephone conversations • Flicker in television receivers, Noise Sources External Internal Noise Noise Atmospheric Industrial Extraterrestrial Solar Noise Cosmic Noise External Noise : • It is due to Man- made and natural resources • Sources over which we have no control such as thunders, snow fall, lightning etc. -

An Implementation of Real-Time Phased Array Radar Fundamental Functions on a DSP-Focused, High-Performance, Embedded Computing Platform
aerospace Article An Implementation of Real-Time Phased Array Radar Fundamental Functions on a DSP-Focused, High-Performance, Embedded Computing Platform Xining Yu 1,*, Yan Zhang 1, Ankit Patel 1, Allen Zahrai 2 and Mark Weber 2 1 School of Electrical and Computer Engineering, University of Oklahoma, 3190 Monitor Avenue, Norman, OK 73019, USA; [email protected] (Y.Z.); [email protected] (A.P.) 2 National Severe Storms Laboratory, National Oceanic and Atomospheric Administration, Norman, OK 73072, USA; [email protected] (A.Z.); [email protected] (M.W.) * Correspondence: [email protected]; Tel.: +1-405-325-2871 Academic Editor: Konstantinos Kontis Received: 22 July 2016; Accepted: 2 September 2016; Published: 9 September 2016 Abstract: This paper investigates the feasibility of a backend design for real-time, multiple-channel processing digital phased array system, particularly for high-performance embedded computing platforms constructed of general purpose digital signal processors. First, we obtained the lab-scale backend performance benchmark from simulating beamforming, pulse compression, and Doppler filtering based on a Micro Telecom Computing Architecture (MTCA) chassis using the Serial RapidIO protocol in backplane communication. Next, a field-scale demonstrator of a multifunctional phased array radar is emulated by using the similar configuration. Interestingly, the performance of a barebones design is compared to that of emerging tools that systematically take advantage of parallelism and multicore capabilities, including the Open Computing Language. Keywords: phased array radar; embedded computing; serial RapidIO; MPAR 1. Introduction 1.1. Real-Time, Large-Scale, Phased Array Radar Systems In [1], we had introduced the real-time phased array radar (PAR) processing based on the Micro Telecom Computing Architecture (MTCA) chassis. -
New Non-Linear FM Pulse-Compression Technique for Radar Applications
University of Central Florida STARS Retrospective Theses and Dissertations 1985 New Non-Linear FM Pulse-Compression Technique for Radar Applications Ronald A. Booher University of Central Florida Part of the Engineering Commons Find similar works at: https://stars.library.ucf.edu/rtd University of Central Florida Libraries http://library.ucf.edu This Masters Thesis (Open Access) is brought to you for free and open access by STARS. It has been accepted for inclusion in Retrospective Theses and Dissertations by an authorized administrator of STARS. For more information, please contact [email protected]. STARS Citation Booher, Ronald A., "New Non-Linear FM Pulse-Compression Technique for Radar Applications" (1985). Retrospective Theses and Dissertations. 4806. https://stars.library.ucf.edu/rtd/4806 NEW NON-LINEAR FM PULSE-COMPRESSION TECHNIQUE FOR RADAR APPLICATIONS BY RONALD A. BOOHER B.S.E., University of Central Florida, 1984 THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science .in Engineering in the Graduate Studies Program of the College of Engineering University of Central Florida Orlando, Florida Fall Tenn 1985 ABSTRACT The development of pulsed type radar signals is examined, with a brief review of matched filtering. Gated RF, linear and non-linear FM pulse-compression ~hirp) and matched filtering of radar signals is reviewed in depth. Emphasis is given to identifying the desirable characteristics of each method. A new method of non-linear FM pulse-compression is introduced; it utilizes the Eigen Function (a form of the raised-cosine family) of functions) as its modulating term. Its properties are then compared to those of the linear and non-linear systems reviewed in the preceding sections.