H20 Maser Observations in W3 (OH): a Comparison of Two Epochs
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Quantum Mechanics of Atoms and Molecules Lectures, the University of Manchester 2005
Quantum Mechanics of Atoms and Molecules Lectures, The University of Manchester 2005 Dr. T. Brandes April 29, 2005 CONTENTS I. Short Historical Introduction : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 1 I.1 Atoms and Molecules as a Concept . 1 I.2 Discovery of Atoms . 1 I.3 Theory of Atoms: Quantum Mechanics . 2 II. Some Revision, Fine-Structure of Atomic Spectra : : : : : : : : : : : : : : : : : : : : : 3 II.1 Hydrogen Atom (non-relativistic) . 3 II.2 A `Mini-Molecule': Perturbation Theory vs Non-Perturbative Bonding . 6 II.3 Hydrogen Atom: Fine Structure . 9 III. Introduction into Many-Particle Systems : : : : : : : : : : : : : : : : : : : : : : : : : 14 III.1 Indistinguishable Particles . 14 III.2 2-Fermion Systems . 18 III.3 Two-electron Atoms and Ions . 23 IV. The Hartree-Fock Method : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 24 IV.1 The Hartree Equations, Atoms, and the Periodic Table . 24 IV.2 Hamiltonian for N Fermions . 26 IV.3 Hartree-Fock Equations . 28 V. Molecules : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 35 V.1 Introduction . 35 V.2 The Born-Oppenheimer Approximation . 36 + V.3 The Hydrogen Molecule Ion H2 . 39 V.4 Hartree-Fock for Molecules . 45 VI. Time-Dependent Fields : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : : 48 VI.1 Time-Dependence in Quantum Mechanics . 48 VI.2 Time-dependent Hamiltonians . 50 VI.3 Time-Dependent Perturbation Theory . 53 VII.Interaction with Light : : : : : : : : : : : : : : : : : : : : : : : -

Optical Pumping 1
Optical Pumping 1 OPTICAL PUMPING OF RUBIDIUM VAPOR Introduction The process of optical pumping is a beautiful example of the interaction between light and matter. In the Advanced Lab experiment, you use circularly polarized light to pump a particular level in rubidium vapor. Then, using magnetic fields and radio-frequency excitations, you manipulate the population of the pumped state in a manner similar to that used in the Spin Echo experiment. You will determine the energy separation between the magnetic substates (Zeeman levels) in rubidium as well as determine the Bohr magneton and observe two-photon transitions. Although the experiment is relatively simple to perform, you will need to understand a fair amount of atomic physics and experimental technique to appreciate the signals you witness. A simple example of optical pumping Let’s imagine a nearly trivial atom: no nuclear spin and only one electron. For concreteness, you can think of the 4He+ ion, which is similar to a Hydrogen atom, but without the nuclear spin of the proton. Its ground state is 1S1=2 (n = 1,S = 1=2,L = 0, J = 1=2). Photon absorption can excite it to the 2P1=2 (n = 2,S = 1=2,L = 1, J = 1=2) state. If you place it in a magnetic field, the energy levels become split as indicated in Figure 1. In effect, each original level really consists of two levels with the same energy; when you apply a field, the “spin up” state becomes higher in energy, the “spin down” lower. The spin energy splitting is exaggerated on the figure. -

Quantum State Detection of a Superconducting Flux Qubit Using A
PHYSICAL REVIEW B 71, 184506 ͑2005͒ Quantum state detection of a superconducting flux qubit using a dc-SQUID in the inductive mode A. Lupașcu, C. J. P. M. Harmans, and J. E. Mooij Kavli Institute of Nanoscience, Delft University of Technology, P.O. Box 5046, 2600 GA Delft, The Netherlands ͑Received 27 October 2004; revised manuscript received 14 February 2005; published 13 May 2005͒ We present a readout method for superconducting flux qubits. The qubit quantum flux state can be measured by determining the Josephson inductance of an inductively coupled dc superconducting quantum interference device ͑dc-SQUID͒. We determine the response function of the dc-SQUID and its back-action on the qubit during measurement. Due to driving, the qubit energy relaxation rate depends on the spectral density of the measurement circuit noise at sum and difference frequencies of the qubit Larmor frequency and SQUID driving frequency. The qubit dephasing rate is proportional to the spectral density of circuit noise at the SQUID driving frequency. These features of the back-action are qualitatively different from the case when the SQUID is used in the usual switching mode. For a particular type of readout circuit with feasible parameters we find that single shot readout of a superconducting flux qubit is possible. DOI: 10.1103/PhysRevB.71.184506 PACS number͑s͒: 03.67.Lx, 03.65.Yz, 85.25.Cp, 85.25.Dq I. INTRODUCTION A natural candidate for the measurement of the state of a flux qubit is a dc superconducting quantum interference de- An information processor based on a quantum mechanical ͑ ͒ system can be used to solve certain problems significantly vice dc-SQUID . -

Quantum Mechanics Department of Physics and Astronomy University of New Mexico
Preliminary Examination: Quantum Mechanics Department of Physics and Astronomy University of New Mexico Fall 2004 Instructions: • The exam consists two parts: 5 short answers (6 points each) and your pick of 2 out 3 long answer problems (35 points each). • Where possible, show all work, partial credit will be given. • Personal notes on two sides of a 8X11 page are allowed. • Total time: 3 hours Good luck! Short Answers: S1. Consider a free particle moving in 1D. Shown are two different wave packets in position space whose wave functions are real. Which corresponds to a higher average energy? Explain your answer. (a) (b) ψ(x) ψ(x) ψ(x) ψ(x) ψ = 0 ψ(x) S2. Consider an atom consisting of a muon (heavy electron with mass m ≈ 200m ) µ e bound to a proton. Ignore the spin of these particles. What are the bound state energy eigenvalues? What are the quantum numbers that are necessary to completely specify an energy eigenstate? Write out the values of these quantum numbers for the first excited state. sr sr H asr sr S3. Two particles of spins 1 and 2 interact via a potential ′ = 1 ⋅ 2 . a) Which of the following quantities are conserved: sr sr sr 2 sr 2 sr sr sr sr 2 1 , 2 , 1 , 2 , = 1 + 2 , ? b) If s1 = 5 and s2 = 1, what are the possible values of the total angular momentum quantum number s? S4. The energy levels En of a symmetric potential well V(x) are denoted below. V(x) E4 E3 E2 E1 E0 x=-b x=-a x=a x=b (a) How many bound states are there? (b) Sketch the wave functions for the first three levels (n=0,1,2). -

Molecular Column Density Calculation
Molecular Column Density Calculation Jeffrey G. Mangum National Radio Astronomy Observatory, 520 Edgemont Road, Charlottesville, VA 22903, USA [email protected] and Yancy L. Shirley Steward Observatory, University of Arizona, 933 North Cherry Avenue, Tucson, AZ 85721, USA [email protected] May 29, 2013 Received ; accepted – 2 – ABSTRACT We tell you how to calculate molecular column density. Subject headings: ISM: molecules – 3 – Contents 1 Introduction 5 2 Radiative and Collisional Excitation of Molecules 5 3 Radiative Transfer 8 3.1 The Physical Meaning of Excitation Temperature . 11 4 Column Density 11 5 Degeneracies 14 5.1 Rotational Degeneracy (gJ)........................... 14 5.2 K Degeneracy (gK)................................ 14 5.3 Nuclear Spin Degeneracy (gI ).......................... 15 5.3.1 H2CO and C3H2 ............................. 16 5.3.2 NH3 and CH3CN............................. 16 5.3.3 c–C3H and SO2 .............................. 18 6 Rotational Partition Functions (Qrot) 18 6.1 Linear Molecule Rotational Partition Function . 19 6.2 Symmetric and Asymmetric Rotor Molecule Rotational Partition Function . 21 2 7 Dipole Moment Matrix Elements (|µjk| ) and Line Strengths (S) 24 – 4 – 8 Linear and Symmetric Rotor Line Strengths 26 8.1 (J, K) → (J − 1, K) Transitions . 28 8.2 (J, K) → (J, K) Transitions . 29 9 Symmetry Considerations for Asymmetric Rotor Molecules 29 10 Hyperfine Structure and Relative Intensities 30 11 Approximations to the Column Density Equation 32 11.1 Rayleigh-Jeans Approximation . 32 11.2 Optically Thin Approximation . 34 11.3 Optically Thick Approximation . 34 12 Molecular Column Density Calculation Examples 35 12.1 C18O........................................ 35 12.2 C17O........................................ 37 + 12.3 N2H ....................................... 42 12.4 NH3 ....................................... -
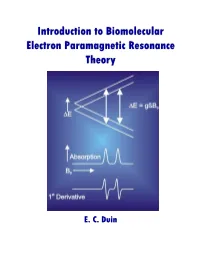
Introduction to Biomolecular Electron Paramagnetic Resonance Theory
Introduction to Biomolecular Electron Paramagnetic Resonance Theory E. C. Duin Content Chapter 1 - Basic EPR Theory 1.1 Introduction 1-1 1.2 The Zeeman Effect 1-1 1.3 Spin-Orbit Interaction 1-3 1.4 g-Factor 1-4 1.5 Line Shape 1-6 1.6 Quantum Mechanical Description 1-12 1.7 Hyperfine and Superhyperfine Interaction, the Effect of Nuclear Spin 1-13 1.8 Spin Multiplicity and Kramers’ Systems 1-24 1.9 Non-Kramers’ Systems 1-32 1.10 Characterization of Metalloproteins 1-33 1.11 Spin-Spin Interaction 1-35 1.12 High-Frequency EPR Spectroscopy 1-40 1.13 g-Strain 1-42 1.14 ENDOR, ESEEM, and HYSCORE 1-43 1.15 Selected Reading 1-51 Chapter 2 - Practical Aspects 2.1 The EPR Spectrometer 2-1 2.2 Important EPR Spectrometer Parameters 2-3 2.3 Sample Temperature and Microwave Power 2-9 2.4 Integration of Signals and Determination of the Signal Intensity 2-15 2.5 Redox Titrations 2-19 2.6 Freeze-quench Experiments 2-22 2.7 EPR of Whole Cells and Organelles 2-25 2.8 Selected Reading 2-28 Chapter 3 - Simulations of EPR Spectra 3.1 Simulation Software 3-1 3.2 Simulations 3-3 3.3 Work Sheets 3-17 i Chapter 4: Selected samples 4.1 Organic Radicals in Solution 4-1 4.2 Single Metal Ions in Proteins 4-2 4.3 Multi-Metal Systems in Proteins 4-7 4.4 Iron-Sulfur Clusters 4-8 4.5 Inorganic Complexes 4-17 4.6 Solid Particles 4-18 Appendix A: Rhombograms Appendix B: Metalloenzymes Found in Methanogens Appendix C: Solutions for Chapter 3 ii iii 1. -

Optical Pumping on Rubidium
Optical Pumping on Rubidium E. Lance (Dated: March 27, 2011) By means of optical pumping the values of gf and nuclear spin for Rubidium were determined. 85 87 85 For Rb gf was found to be .35. For Rb gf was found to be .50. The nuclear spin for Rb was found to be 2.35 with a theoretical value of 2.5, for Rb87 the nuclear spin was found to be 1.5 with a theoretical value of 1.5. Quadratic Zeeman effect resonances were observed around magnetic fields of 6.98 gauss and RF of 4.064 MHz. I. INTRODUCTION Rabi equation: Optical pumping refers to the redistribution of oc- cupied energy states, in thermal equilibrium, inside an ∆W µ ∆W 4M 1=2 W (F; M) = − − j BM± 1+ x+x2 : atom. The redistribution is achieved by polarizing inci- 2(2I + 1) I 2 2I + 1 dent light, therefor, pumping electrons to less absorbent (4) energy states. By confining electrons in less absorbent A plot of Breit-Rabi equation is shown in figure 2, this energy states we can then study the relationship between plot shows how when the magnetic field becomes large, magnetic fields and Zeeman splitting. the energy splittings stop behaving in a linear fashion and a quadratic Zeeman effect can be seen. II. THEORY We will be dealing with Rubidium atoms which can, essentially, be conceived as a hydrogen like single elec- tron atoms. The single valence electron in Rubidium can be described by a total angular momentum vector J which couples the orbital angular momentum L with the spin orbital angular momentum S. -

Measuring Optical Pumping of Rubidium Vapor
Measuring Optical Pumping of Rubidium Vapor Shawn Westerdale∗ MIT Department of Physics (Dated: April 4, 2010) Optical pumping is a process that stochastically increases the energy levels of atoms in a magnetic field to their highest Zeeman energy state. This technique is important for its applications in applied atomic and molecular physics, particularly in the construction of lasers. In this paper, we will construct a model of optical pumping for the case of rubidium atoms and will use experimental results to determine the Land´eg-factors for the two stable isotopes of rubidium and measure the relaxation time for pumped rubidium. We will then show how the relaxation time constant varies with temperature and pumping light intensity. Lastly, we will use our model and observations to determine the mean free path of 7948 Aphotons˚ through rubidium vapor at 41.8◦C. 1. INTRODUCTION vector F~ = I~+ J~, we arrive at the conclusion that ∆E = gf mf µBB, where gf is given by, In the 1950s A. Kastler developed the process known f(f + 1) + j(j + 1) − i(i + 1) as optical pumping, for which he later received the Nobel gf ≈ gJ (2) prize. Optical pumping is the excitation of atoms with 2f(f + 1) a resonant light source and the stochastically biasing of the transitions in order to migrate the atoms into the Note that f, j, and i are the eigenvalues of F , J, and I, highest energy Zeeman state. Rubidium vapor was used respectively. in this experiment due to its well understood hyperfine levels. The use of rubidium also simplifies the physics, since there are only two stable isotopes of rubidium, 85Rb 1.1.1. -
A 4 Superconducting Qubits
A 4 Superconducting Qubits William D. Oliver MIT Lincoln Laboratory Lexington, MA, U.S.A. Contents 1 Introduction 3 2 Survey of Josephson junctions and superconducting qubit modalities 4 2.1 Josephson junctions . 4 2.1.1 Josephson equations . 4 2.1.2 RCSJ model . 5 2.1.3 Thermal activation . 7 2.1.4 Macroscopic quantum tunneling . 8 2.2 DC SQUID: a tunable junction . 9 2.2.1 DC SQUID equations . 9 2.2.2 Zero-inductance case, Ic1 = Ic2 ..................... 10 2.2.3 Zero-inductance case, Ic1 6= Ic2 ..................... 11 2.2.4 Non-zero inductance case . 11 2.2.5 Equivalence to a Josephson junction . 11 2.3 Superconducting qubits . 13 2.3.1 Charge qubit . 13 2.3.2 Quantronium . 16 2.3.3 Transmon . 18 2.3.4 Persistent-current flux qubit . 19 2.3.5 Phase qubit . 25 2.3.6 RF SQUID qubit . 27 2.3.7 Fluxonium and metastable RF-SQUID: inductively shunted qubits . 27 A4.2 William D. Oliver 3 Free- and driven evolution of two-level systems 28 3.1 Representations of the qubit Hamiltonian . 29 3.1.1 Laboratory frame . 29 3.1.2 Qubit frame (qubit eigenbasis) . 29 3.1.3 Rotating frame . 31 3.2 General perturbation expansion of Hamiltonian . 32 3.3 Longitudinal and transverse relaxation . 33 3.3.1 Bloch-Redfield approach . 35 3.3.2 Modification due to 1=f-type noise . 35 3.4 Power spectral density (PSD) . 36 3.5 Connecting T1 to Sλ(!) .............................. 36 3.6 Connecting T' to Sλ(!) ............................. -

Optical Pumping of Rubidium
Instru~nentsDesigned for Teaching OPTICAL PUMPING OF RUBIDIUM Guide to the Experiment INSTRUCTOR'S MANUAL A PRODUCT OF TEACHSPIN, INC. $.< Teachspin, Inc. 45 Penhurst Park, Buffalo, NY 14222-10 13 h. (716) 885-4701 or www.teachspin.com Copyright O June 2002 4 rq hc' $ t,q \I Table of Contents SECTION PAGE 1. Introduction 2. Theory A. Structure of alkali atoms B. Interaction of an alkali atom with a magnetic field C. Photon absorption in an alkali atom D. Optid pumping in rubidium E. Zero field transition F. Rf spectroscopy of IZbgs and ~b*' G. Transient effects 3. Apparatus A. Rubidium discharge lamp B. ~etktor c. optics D. Temperature regulation E. Magnetic fields F. Radio frequency - 4. Experiments A. Absorption of Rb resonance radiation by atomic Rb 4-1 B. Low field resonances 4-6 C. Quadratic Zeeman Effect 4-12 D. Transient effects 4-17 5. Getting Started 5-1 INTRODUCTION The term "optical pumping" refers to a process which uses photons to redistribute the states occupied by a collection of atoms. For example, an isolated collection of atoms in the form of a gas will occupy their available energy states, at a given temperature, in a way predicted by standard statistical mechanics. This is referred to as the thermal equilibrium distribution. But the distribution of the atoms among these energy states can be radically altered by the clever application of what is called "resonance radiation." Alfied Kastler, a French physicist, introduced modem optical pumping in 1950 and, in 1966, was awarded a Nobel Prize "jhr the discovery and development of optical methods for stu&ing hertzian resonances in atoms. -
![Arxiv:1905.00776V1 [Cond-Mat.Mes-Hall] 2 May 2019](https://docslib.b-cdn.net/cover/6791/arxiv-1905-00776v1-cond-mat-mes-hall-2-may-2019-4336791.webp)
Arxiv:1905.00776V1 [Cond-Mat.Mes-Hall] 2 May 2019
Long-Range Microwave Mediated Interactions Between Electron Spins F. Borjans,1 X. G. Croot,1 X. Mi,1, ∗ M. J. Gullans,1 and J. R. Petta1, y 1Department of Physics, Princeton University, Princeton, New Jersey 08544, USA (Dated: May 3, 2019) Entangling gates for electron spins in semiconductor quantum dots are generally based on exchange, a short- ranged interaction that requires wavefunction overlap. Coherent spin-photon coupling raises the prospect of using photons as long-distance interconnects for spin qubits. Realizing a key milestone for spin-based quantum information processing, we demonstrate microwave-mediated spin-spin interactions between two electrons that are physically separated by more than 4 mm. Coherent spin-photon coupling is demonstrated for each indi- vidual spin using microwave transmission spectroscopy. An enhanced vacuum Rabi splitting is observed when both spins are tuned into resonance with the cavity, indicative of a coherent spin-spin interaction. Our results demonstrate that microwave-frequency photons can be used as a resource to generate long-range two-qubit gates between spatially separated spins. Nonlocal qubit interactions are a hallmark of advanced and the cavity. Overcoming these challenges, we use a mi- quantum information technologies [1–5]. The ability to trans- crowave frequency photon to coherently couple two electron fer quantum states and generate entanglement over distances spins that are separated by more than 4 mm, opening the door much larger than qubit length scales greatly increases connec- to a Si spin qubit architecture with all-to-all connectivity. De- tivity and is an important step towards maximal parallelism liberately engineered asymmetries in micromagnet design, in and the implementation of two-qubit gates on arbitrary pairs conjunction with three-axis control of the external magnetic of qubits [6]. -

1/F Noise and Two-Level Systems in Josephson Qubits 11
First published in: 1 /F NOISE AND TWO-LEVEL SYSTEMS IN JOSEPHSON QUBITS Alexander Shnirman1, Gerd Sch¨on1, Ivar Martin2, and Yuriy Makhlin3 1Institut f¨ur Theoretische Festk¨orperphysik, Universit¨at Karlsruhe, D-76128 Karl- sruhe, Germany 2Theoretical Division, Los Alamos National Laboratory, Los Alamos, NM 87545, USA 3Landau Institute for Theoretical Physics, Kosygin st. 2, 119334 Moscow, Russia Abstract. Quantum state engineering in solid-state systems is one of the most rapidly developing areas of research. Solid-state building blocks of quantum computers have the advantages that they can be switched quickly, and they can be integrated into electronic control and measuring circuits. Substantial progress has been achieved with superconducting circuits (qubits) based on Josephson junctions. Strong coupling to the external circuits and other parts of the environment brings, together with the advantages, the problem of noise and, thus, decoherence. Therefore, the study of sources of decoherence is necessary. Josephson qubits themselves are very useful in this study: they have found their first application as sensitive spectrometers of the surrounding noise. Key words: Josephson qubits,1/ f noise 1. Introduction Josephson junction based systems are one of the promising candidates for quan- tum state engineering with solid state systems. In recent years great progress was achieved in this area. After initial breakthroughs of the groups in Saclay and NEC (Tsukuba) in the late 90’s, there are now many experimental groups worldwide working in this area, many of them with considerable previous experience in nano-electronics. By now the full scope of single-qubit (NMR-like) control is possible.