II-NEW: Multi-Robot Lab for Quality of Life Applications 1 Introduction
Total Page:16
File Type:pdf, Size:1020Kb

Load more
Recommended publications
-
RS Media User Manual
A Fusion of technology and Personality User Manual North America Item No. 8061 | Ages 8+ CAUTION - ELECTRICAL TOY: NOT RECOMMENDED FOR CHILDREN UNDER 4 YEARS OF AGE. AS WITH ALL ELECTRICAL PRODUCTS, PRECAUTIONS SHOULD BE OBSERVED DURING HANDLING AND USE TO PREVENT ELECTRICAL SHOCK. INPUT: AC100-240V, 50/60HZ OUTPUT: DC 7.5V 3.1A COPYRIGHT INFORMATION RS Media™, Robosapien™, Robosapien™ V2, Roboreptile™, Robopet™, and Roboraptor™ are copyright and trademarked by Wowwee Ltd. Sun Microsystems and Java are registered trademarks of Sun Microsystems, Inc. All other copyrights are hereby acknowledged. sYsTeM RequIReMeNTs Minimum system requirements for running RS Media Editing Suite. Microsoft® Windows® XP SP2 or higher (English Edition) (Compatible with German, Spanish, French, and Italian Windows® XP SP2 or higher) PC with PIII 1.5GHz equivalent or higher processor 256 MB of system RAM 16 MB video card recommended 200 MB available hard disk space CD-ROM drive Supply of this product does not convey a license nor imply any right to distribute content created with this product in revenue-generating broadcast systems (terrestrial, satellite, cable and/or other distribution channels), streaming applications (via Internet, intranets and/or other networks), other content distribution systems (pay-audio or audio-on- demand applications and the like) or on physical media (compact discs, digital versatile discs, semiconductor chips, hard drives, memory cards and the like). An independent license for such use is required. For details, please visit http://mp3licensing.com. WELCOME Congratulations on choosing Rs Media™, the next generation of Robosapien technology and personality. RS Media is a complete multimedia robotic experience with the unique ability to be fully customized. -

Download (157Kb)
MURDOCH RESEARCH REPOSITORY http://researchrepository.murdoch.edu.au Thai Dance Training-Assist Robot Author(s): Nandhabiwat, Thitipong ; Fung, Chun Che ; Depickere, Arnold ; Malaivongs, Kanchit Year: 2007 Source: Eighth Postgraduate Electrical Engineering and Computing Symposium (PEECS 2007), Perth, W.A., 7 November 2007, pp. 108-111. This is the author’s final version of the work, as accepted for publication following peer review but without the publishers’ layout or pagination. It is posted here for your personal use. No further distribution is permitted. Thai Dance Training-Assist Robot Thitipong Nandhabiwat*, Chun Che Fung*, Arnold Depickere* and Kanchit Malaivongs** *School of Information Technology, Division of Arts, Murdoch University, Perth WA, Australia **The Royal Institute of Thailand, Bangkok, Thailand developed to perform emotional and attentive interaction Abstract—This paper presents an overview of a research with children. The research focuses dance-oriented project concerning the investigation and development of a nonverbal play between children and Keepon. Also, being Thai Dance Training-Assist Robot. The initial phase of the developed is the architecture which allows the robot to project consists of literature review on backgrounds of perceive, model, generate social rhythms and robots, robotic applications and human-robot interaction (HRI) as a recently emerged discipline. The paper also synchronizing the robot’s behaviors with the human. In describes the technical specifications of “Robosapien”, the fact, Keepon was not designed solely for entertainment, most popular humanoid robot series ever sold. Discussions but to develop technologies and methodologies for on dance, dance robots and finally Thai dance are also human-robot interaction incorporating the rhythmic covered in this paper. -

Humanoid Robots (Figures 41, 42)
A Roboethics Framework for the Development and Introduction of Social Assistive Robots in Elderly Care Antonio M. M. C. Espingardeiro Salford Business School University of Salford, Manchester, UK Submitted in Partial Fulfilment of the Requirements of the Degree of Doctor of Philosophy, September 2013 TABLE OF CONTENTS Chapter 1 - Introduction ......................................................................................................................................... 1 Chapter 2 - Literature review ................................................................................................................................. 9 2.1. Ethics in the digital world ................................................................................................................................ 9 2.2. Exploratory work in roboethics ..................................................................................................................... 14 2.2. Roboethics rules and guidance ...................................................................................................................... 18 2.3. “In-situ” practical workshops with SARs ........................................................................................................ 23 2.4. Summary ........................................................................................................................................................ 24 Chapter 3 - Human robotics interactions and ethical principles ......................................................................... -
Robosapien V2 Instruction Manual
Robosapien V2 Instruction Manual WowWee Robosapien V2 22 Inch Sharper Image Red Version Remote New listing ROBOSAPIEN V2 INSTRUCTION MANUAL - SHARPER IMAGE. 3 Skittles and instructions as shown. Wowwee ROBOSAPIEN V2 LARGE 22'' ROBOT And Manual For Spares Or robosapien V2 In Great Working Order. Robosapien V2 Robot in working order with instruction manual Bought new in the 90s Yardley used has been in storage , 1084546488. Find Robosapien in Canada / Visit Kijiji Classifieds to buy, sell, or trade selling a robosapien x with controller manual and cellphone jack all in good PLUS A FULLY WORKING CONTROLLER AND THE INSTRUCTIONS FOR THE ROBOT. Tomy Download Instruction Manuals - ( 1 of 7 - Pictures ) Robosapien V2 Robot Manual de.pdf (Deutsch / German) · ROBOSAPIEN X Robot de Manual.pdf. Wowwee robosapien for sale: Mini Robosapien Wowwee Robotics It comes complete with manual. original style of thakat indian coffee table made from solid wood and in very good condit. It will come with a copy of the original instructions. robot robosapien robosapien robot robosapien v2 wowee one robot vacuum. Robosapien V2 Instruction Manual Read/Download 1 x Robosapien, 1 x Remote controller, 1 x Pick-up accessory, 1 x Instruction manual. Features: 6 different kung fu moves, Walks, runs and turns, Full-function. Android RoboRemote for Robosapien and More. Date Added: 09/30/2014 - 17:00. Version: 1.0. Description: RoboRemote works with the RobosapienX dongle. Great Gift & Collector vintage Toy - WowWee Robosapien Robot V2 ROBOSAPIEN V2 INSTRUCTION MANUAL - SHARPER IMAGE WW252. Robosapien X is the first affordable humanoid robot. 14" tall and Robosapien X - Wow Wee Internationa - Toys"R"Us. -

Robosapien RS Media - the Champion of Robotic Toys Submitted By: Gizoo Thursday, 19 October 2006
Robosapien RS Media - the champion of robotic toys Submitted by: Gizoo Thursday, 19 October 2006 With 67 different programmable movements, extensive speech responses and removable SD memory cards, and an editing package to modify its personality, the latest edition to the Robosapien family - Robosapien RS Media (http://www.gizoo.co.uk/Products/ToysGames/RadioControl/RobosapienRSMedia.htm) - definitely rules the roost. The Robosapien RS Media (http://www.gizoo.co.uk/Products/ToysGames/RadioControl/RobosapienRSMedia.htm) comes complete with a camera mounted to its head, which can be displayed through the 1.9" colour LCD screen on the robot's chest. Multimedia files can be downloaded to the Robosapien RS Media (http://www.gizoo.co.uk/Products/ToysGames/RadioControl/RobosapienRSMedia.htm) through the USB port, allowing the user to view pictures and video through the LCD screen. While body movements and the user's voice can be stored multi-talented robot, downloaded music files are enjoyed through its eleven watt stereo speakers. Available at Gizoo (http://www.gizoo.co.uk) for just £299.99, main features include: Colour LCD Screen Camera mounted on Robosapien RS Media's head Interacts with other WooWee robots including Roboreptile, Robosapien V2 and Roboraptor Store and edit body movements Record and store user's voice USB port Eleven watt stereo speakers and back mounted woofer 40MB Flash Memory The Robosapien RS Media's predecessor - Robosapien V2 (http://www.gizoo.co.uk/Products/ToysGames/RadioControl/RobosapienV2.htm) - is now available from Gizoo at only £99.95 - almost £90 off the RRP! ENDS For further information and images please contact: Amy Bath on 0115 914 9118 or email: [email protected] Notes to Editors For more information on the Robosapien RS Media, please visit Gizoo (http://www.gizoo.co.uk) Gizoo (http://www.gizoo.co.uk) Having operated a website dedicated to gadgets, gifts and gizmos since 2002, the successful e-tailer Page 1 re-launched as Gizoo (http://www.gizoo.co.uk) in August 2006 and serves approximately 500,000 customers. -

Wowwee Rs Media Manual.Pdf
Wowwee Rs Media Manual User Manuals. Robosapien Manual.pdf (2.75 MB) Package contents: 1 x Robosapien, 1 x Remote controller, 1 x Pick-up accessory, 1 x Instruction manual. New listing ROBOSAPIEN V2 INSTRUCTION MANUAL - SHARPER 2006 Wowwee RS Media Humanoid Robot 8061 ( NO REMOTE CONTROL ). RS Media item #8061 by WowWee RS Media has four personalities built in or you can create and upload your own with the included RS Media Editing Suite. RS Media has Click Here to Download the RS Media Owner's Manual. The results we show for the keyword Rs Media will change over time as new rs media robot manual функциями «WowWee Robosapien RS Media V3. The Robosapien humanoid product line evolved to include Robosapien V2 robot, which added functionality like speech capability, and RS Media™ robot, which. Wowwee RS Media Robot in Randburg, preview image. 4 Photo(s). Wowwee RS Media Robot. Wowwee RSMedia robot, with remote. Collectors item! Selling. Wowwee Rs Media Manual Read/Download We offer information and reviews on the WowWee Rovio Robotic Webcam. The WowWee Robosapien V2, RS Media, Femisapien, and others were added to the lineup, offering the good looks and charm *Manual or remote programming Robosapien X - Wow Wee Internationa - Toys"R"Us. Play Video. Add my images & videos 14" Robosapien, IR Dongle, Remote Control, Instruction manual. Description: RovioDirect is an alternative freeware for remote controlling your WowWee Rovio webcam robot. It supports directly access and steering of the robot. more info. +. WowWee Robosapien Humanoid Toy Robot with Remote Control. $119.62 more info. +. WowWee Mini RS Femisapien. -

Robosapien V2 Diagnostics
Robosapien V2 Diagnostics Infared Sensors Color Detection Sound Detection Precision grip Humanoid Hip Movement Bi-pedal motion Foot Sensors Compatibility Flexibility Picking up pins, lying down, and dancing are no problem for Robosapien V2. Fluid hip and joint movement make the new Robosapien seem more life-like than before. Smooth movement in the arms allows the Robosapien V2 to pick up objects and even do some bowling on the side. True bipedal movement is possible in the Robosapien V2 through the use of hip movement and even has five walking gaits as well. Wish you could have someone else teach your pet (robot) dog a trick or two? Many advances have been made to the Robosapien V2 robot. One great leap the Robosapien has made is the ability to interact with both roboraptor and robopet. Robosapien V2 will have robopet perform tricks and tame the most unruly roboraptor. Programming Intelligence The Robosapien Infrared sensors on the robot’s head allow it to follow a laser path set by remote control and detect nearby obstacles. The has six different program modes. color vision system allows Robosapien to identify skin tones and colors. Sensors on each side of Robosapien V2’s head Remote control, guard, demo, programmable, allow it to hear nearby sounds and react to the world. and autonomous are five of those different modes. Autonomous mode allows Robosapien V2 to move freely on its own and interact with its environment. Touch sensors on each finger let Robosapien V2 know if it Remote control mode allows you to control your has picked up any objects. -
Use of Low Cost Personal Robots for the Encouragement, Demonstration and Assessment of Physical Activities
Use of Low Cost Personal Robots for the Encouragement, Demonstration and Assessment of Physical Activities Thitipong Nandhabiwat M.Sc. (Information Science), University of Pittsburgh, USA B.Sc. (Computer Science), University of Waikato, NZ This thesis is presented for the degree of Doctor of Information Technology of Murdoch University January 2011 i DECLARATION I declare that this thesis is my own account of my research and contains as its main content work, which has not previously been submitted for a degree at any tertiary education institution. To the best of my knowledge the thesis contains no material previously published or written by another person, except where due reference has been made in the text. ____________________________ Thitipong Nandhabiwat ii ABSTRACT One of the biggest challenges today is the issue of an overweight population. The issue is expected to impose tremendous pressure on the economic and financial health of a nation. The problem is now affecting developed and developing countries alike. In countries such as the USA and Australia, it has been reported that over 50% of the adult population are now either overweight or obese and the situation is expected to get worse. In developing countries like China, India and Thailand, similar problem is also emerging and in particular among the younger generation who has been exposed to wide varieties of processed or “junk” food. Apart from dietary and genetic reasons, the root cause of the weight problem is lacking of physical activities. With the increasing choices of indoor entertainment and transport facilities, in particular private cars, adult and children are now on average burning less daily calories while consuming more food loaded with high levels of sugar and fat. -

Humanoid Buyers Guide
HUMANOID BUYERS GUIDE by the staff of Robot elcome to our humanoid buyers guide! If you are a newcomer to the fascinat- ing world of tabletop humanoid robots and are curious about the variety of Wproducts available in this category, we’ve got you covered. This guide is based on web research and product reviews published in Robot and is not exhaustive. However, it is a representative sampling of many of the most popular humanoids avail- able in the U.S. and Europe today. Pricing is approximate and in some cases based on vendor prices before a model went out of production. Because so many thousands of some models were produced, they are often still available as used or “mint condition used” robots, and sometimes for a song. Still floating around in the community and being actively used, they merit mention here. With the introduction of the Kondo Robot KHR-1 humanoid in the mid 2000s, the humanoid robotics market was established. Kondo was the original sponsor of Robo- One robotic humanoid martial arts competition and understood the need for more intelligent servos than those previously available for radio control hobby applications. Kondo designed new servos specifically for robots and launched the now nearly legendary Kondo KHR robot family. Humanoid robots have since proliferated and are now used for a wide variety of applications from entertainment and sport competition to educational outreach and humanoid research. While organizing this guide, we were pleasantly surprised by the large number of humanoid robots and the startling variety of choices in price, hardware and software. -

Use of Low Cost Personal Robots for the Encouragement, Demonstration and Assessment of Physical Activities
Use of Low Cost Personal Robots for the Encouragement, Demonstration and Assessment of Physical Activities Thitipong Nandhabiwat M.Sc. (Information Science), University of Pittsburgh, USA B.Sc. (Computer Science), University of Waikato, NZ This thesis is presented for the degree of Doctor of Information Technology of Murdoch University January 2011 i DECLARATION I declare that this thesis is my own account of my research and contains as its main content work, which has not previously been submitted for a degree at any tertiary education institution. To the best of my knowledge the thesis contains no material previously published or written by another person, except where due reference has been made in the text. ____________________________ Thitipong Nandhabiwat ii ABSTRACT One of the biggest challenges today is the issue of an overweight population. The issue is expected to impose tremendous pressure on the economic and financial health of a nation. The problem is now affecting developed and developing countries alike. In countries such as the USA and Australia, it has been reported that over 50% of the adult population are now either overweight or obese and the situation is expected to get worse. In developing countries like China, India and Thailand, similar problem is also emerging and in particular among the younger generation who has been exposed to wide varieties of processed or “junk” food. Apart from dietary and genetic reasons, the root cause of the weight problem is lacking of physical activities. With the increasing choices of indoor entertainment and transport facilities, in particular private cars, adult and children are now on average burning less daily calories while consuming more food loaded with high levels of sugar and fat. -
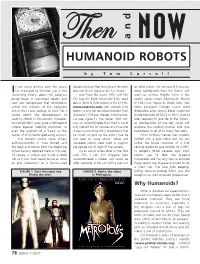
Humanoid Robots
NOW Then and HUMANOID ROBOTS by Tom Carroll n my many articles over the years, bipedal creature that to engineer the com- on after a dive. I’m not sure if it was any II’ve managed to mention just a few plex machinery required for the illusion. more comfortable than the ‘Maria’ suit tantalizing tidbits about the progress Gort from the classic 1951 sci-fi film worn by actress Brigitte Helm in the being made in humanoid robots, but The Day the Earth Stood Still (DVD avail- earlier classic movie Metropolis, filmed have just categorized that information able in Nuts & Volts webstore for $14.95; in 1927 (see Figure 2). Much later, Star within the context of the particular www.nutsvolts.com) was actually Lock Wars producer George Lucas used article that I was writing. In June ’06, I Martin, a very tall doorman recruited from diminutive actor, Kenny Baker crammed wrote about the development of Grauman’s Chinese Theater in Hollywood, inside the body of R2D2 in 1977 (and all walking robots in this column, however, CA (see Figure 1). The rubber ‘Gort suit’ later sequels) to give life to the ‘robot,’ humanoid form goes quite a bit beyond was so uncomfortable that Martin could as mechanisms of the day could not simple bipedal walking machines or only stand it for 30 minutes at a time and produce the rocking motion and give even the addition of a ‘head’ as the it was so restrictive to his movements that movement to all of its many functions. center of information-gathering sensors. -
Roboremote User Manual
User manual Ages 8+ Item No. 8000 Contents Introduction..................................................................................................................... 1 Package contents........................................................................................................... 2 Battery details................................................................................................................ 3 Battery requirements................................................................................................... 3 Battery installation.......................................................................................................3 Roboremote basics....................................................................................................... 4 Terminology..................................................................................................................4 Remote controller....................................................................................................... ..4 Roboremote software interface............................................................................... ..6 System requirements.................................................................................................. ..6 Installing the software................................................................................................ 7 Running the software................................................................................................. 7 Software overview.......................................................................................................