A Real Time Storm Surge Forecasting System Using ADCIRC
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Verification of a Multimodel Storm Surge Ensemble Around New York City and Long Island for the Cool Season
922 WEATHERANDFORECASTING V OLUME 26 Verification of a Multimodel Storm Surge Ensemble around New York City and Long Island for the Cool Season TOM DI LIBERTO * AND BRIAN A. C OLLE School of Marine and Atmospheric Sciences, Stony Brook University, Stony Brook, New York NICKITAS GEORGAS AND ALAN F. B LUMBERG Stevens Institute of Technology, Hoboken, New Jersey ARTHUR A. T AYLOR Meteorological Development Laboratory, NOAA/NWS, Office of Science and Technology, Silver Spring, Maryland (Manuscript received 21 November 2010, in final form 27 June 2011) ABSTRACT Three real-time storm surge forecasting systems [the eight-member Stony Brook ensemble (SBSS), the Stevens Institute of Technology’s New York Harbor Observing and Prediction System (SIT-NYHOPS), and the NOAA Extratropical Storm Surge (NOAA-ET) model] are verified for 74 available days during the 2007–08 and 2008–09 cool seasons for five stations around the New York City–Long Island region. For the raw storm surge forecasts, the SIT-NYHOPS model has the lowest root-mean-square errors (RMSEs) on average, while the NOAA-ET has the largest RMSEs after hour 24 as a result of a relatively large negative surge bias. The SIT-NYHOPS and SBSS also have a slight negative surge bias after hour 24. Many of the underpredicted surges in the SBSS ensemble are associated with large waves at an offshore buoy, thus illustrating the potential importance of nearshore wave breaking (radiation stresses) on the surge pre- dictions. A bias correction using the last 5 days of predictions (BC) removes most of the surge bias in the NOAA-ET model, with the NOAA-ET-BC having a similar level of accuracy as the SIT-NYHOPS-BC for positive surges. -

Global Storm Tide Modeling with ADCIRC V55: Unstructured Mesh Design and Performance
Geosci. Model Dev., 14, 1125–1145, 2021 https://doi.org/10.5194/gmd-14-1125-2021 © Author(s) 2021. This work is distributed under the Creative Commons Attribution 4.0 License. Global storm tide modeling with ADCIRC v55: unstructured mesh design and performance William J. Pringle1, Damrongsak Wirasaet1, Keith J. Roberts2, and Joannes J. Westerink1 1Department of Civil and Environmental Engineering and Earth Sciences, University of Notre Dame, Notre Dame, IN, USA 2School of Marine and Atmospheric Science, Stony Brook University, Stony Brook, NY, USA Correspondence: William J. Pringle ([email protected]) Received: 26 April 2020 – Discussion started: 28 July 2020 Revised: 8 December 2020 – Accepted: 28 January 2021 – Published: 25 February 2021 Abstract. This paper details and tests numerical improve- 1 Introduction ments to the ADvanced CIRCulation (ADCIRC) model, a widely used finite-element method shallow-water equation solver, to more accurately and efficiently model global storm Extreme coastal sea levels and flooding driven by storms and tides with seamless local mesh refinement in storm landfall tsunamis can be accurately modeled by the shallow-water locations. The sensitivity to global unstructured mesh design equations (SWEs). The SWEs are often numerically solved was investigated using automatically generated triangular by discretizing the continuous equations using unstructured meshes with a global minimum element size (MinEle) that meshes with either finite-volume methods (FVMs) or finite- ranged from 1.5 to 6 km. We demonstrate that refining reso- element methods (FEMs). These unstructured meshes can ef- lution based on topographic seabed gradients and employing ficiently model the large range in length scales associated a MinEle less than 3 km are important for the global accuracy with physical processes that occur in the deep ocean to the of the simulated astronomical tide. -

Steps Towards Modeling Community Resilience Under Climate Change: Hazard Model Development
Journal of Marine Science and Engineering Article Steps towards Modeling Community Resilience under Climate Change: Hazard Model Development Kendra M. Dresback 1,*, Christine M. Szpilka 1, Xianwu Xue 2, Humberto Vergara 3, Naiyu Wang 4, Randall L. Kolar 1, Jia Xu 5 and Kevin M. Geoghegan 6 1 School of Civil Engineering and Environmental Science, University of Oklahoma, Norman, OK 73019, USA 2 Environmental Modeling Center, National Centers for Environmental Prediction/National Oceanic and Atmospheric Administration, College Park, MD 20740, USA 3 Cooperative Institute of Mesoscale Meteorology, University of Oklahoma/National Weather Center, Norman, OK 73019, USA 4 College of Civil Engineering and Architecture, Zhejiang University, Hangzhou 310058, China 5 School of Civil and Hydraulic Engineering, Dalian University of Technology, Dalian 116024, China 6 Northwest Hydraulic Consultants, Seattle, WA 98168, USA * Correspondence: [email protected]; Tel.: +1-405-325-8529 Received: 30 May 2019; Accepted: 11 July 2019; Published: 16 July 2019 Abstract: With a growing population (over 40%) living in coastal counties within the U.S., there is an increasing risk that coastal communities will be significantly impacted by riverine/coastal flooding and high winds associated with tropical cyclones. Climate change could exacerbate these risks; thus, it would be prudent for coastal communities to plan for resilience in the face of these uncertainties. In order to address all of these risks, a coupled physics-based modeling system has been developed that simulates total water levels. This system uses parametric models for both rainfall and wind, which only require essential information (e.g., track and central pressure) generated by a hurricane model. -
Storms Are Thunderstorms That Produce Tornadoes, Large Hail Or Are Accompanied by High Winds
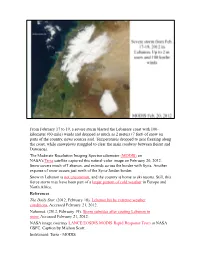
From February 17 to 19, a severe storm blasted the Lebanese coast with 100- kilometer (60-mile) winds and dropped as much as 2 meters (7 feet) of snow on parts of the country, news sources said. Temperatures dropped to near freezing along the coast, while snowplows struggled to clear the main roadway between Beirut and Damascus. The Moderate Resolution Imaging Spectroradiometer (MODIS) on NASA’s Terra satellite captured this natural-color image on February 20, 2012. Snow covers much of Lebanon, and extends across the border with Syria. Another expanse of snow occurs just north of the Syria-Jordan border. Snow in Lebanon is not uncommon, and the country is home to ski resorts. Still, this fierce storm may have been part of a larger pattern of cold weather in Europe and North Africa. References The Daily Star. (2012, February 18). Lebanon hit by extreme weather conditions. Accessed February 21, 2012. Naharnet. (2012, February 19). Storm subsides after coating Lebanon in snow. Accessed February 21, 2012. NASA image courtesy LANCE/EOSDIS MODIS Rapid Response Team at NASA GSFC. Caption by Michon Scott. Instrument: Terra - MODIS Flooding is the most common of all natural hazards. Each year, more deaths are caused by flooding than any other thunderstorm related hazard. We think this is because people tend to underestimate the force and power of water. Six inches of fast-moving water can knock you off your feet. Water 24 inches deep can carry away most automobiles. Nearly half of all flash flood deaths occur in automobiles as they are swept downstream. -

Massachusetts Tropical Cyclone Profile August 2021
Commonwealth of Massachusetts Tropical Cyclone Profile August 2021 Commonwealth of Massachusetts Tropical Cyclone Profile Description Tropical cyclones, a general term for tropical storms and hurricanes, are low pressure systems that usually form over the tropics. These storms are referred to as “cyclones” due to their rotation. Tropical cyclones are among the most powerful and destructive meteorological systems on earth. Their destructive phenomena include storm surge, high winds, heavy rain, tornadoes, and rip currents. As tropical storms move inland, they can cause severe flooding, downed trees and power lines, and structural damage. Once a tropical cyclone no longer has tropical characteristics, it is then classified as a post-tropical system. The National Hurricane Center (NHC) has classified four stages of tropical cyclones: • Tropical Depression: A tropical cyclone with maximum sustained winds of 38 mph (33 knots) or less. • Tropical Storm: A tropical cyclone with maximum sustained winds of 39 to 73 mph (34 to 63 knots). • Hurricane: A tropical cyclone with maximum sustained winds of 74 mph (64 knots) or higher. • Major Hurricane: A tropical cyclone with maximum sustained winds of 111 mph (96 knots) or higher, corresponding to a Category 3, 4 or 5 on the Saffir-Simpson Hurricane Wind Scale. Primary Hazards Storm Surge and Storm Tide Storm surge is an abnormal rise of water generated by a storm, over and above the predicted astronomical tide. Storm surge and large waves produced by hurricanes pose the greatest threat to life and property along the coast. They also pose a significant risk for drowning. Storm tide is the total water level rise during a storm due to the combination of storm surge and the astronomical tide. -

Finding Storm Track Activity Metrics That Are Highly Correlated with Weather Impacts
1DECEMBER 2020 Y A U A N D C H A N G 10169 Finding Storm Track Activity Metrics That Are Highly Correlated with Weather Impacts. Part I: Frameworks for Evaluation and Accumulated Track Activity ALBERT MAN-WAI YAU AND EDMUND KAR-MAN CHANG School of Marine and Atmospheric Sciences, Stony Brook University, State University of New York, Stony Brook, New York (Manuscript received 29 May 2020, in final form 10 August 2020) ABSTRACT: In the midlatitudes, storm tracks give rise to much of the high-impact weather, including precipitation and strong winds. Numerous metrics have been used to quantify storm track activity, but there has not been any systematic evaluation of how well different metrics relate to weather impacts. In this study, two frameworks have been developed to provide such evaluations. The first framework quantifies the maximum one-point correlation between weather impacts at each grid point and the assessed storm track metric. The second makes use of canonical correlation analysis to find the best correlated patterns and uses these patterns to hindcast weather impacts based on storm track metric anomalies using a leave- N-out cross-validation approach. These two approaches have been applied to assess multiple Eulerian variances and Lagrangian tracking statistics for Europe, using monthly precipitation and a near-surface high-wind index as the assessment criteria. The results indicate that near-surface storm track metrics generally relate more closely to weather impacts than upper-tropospheric metrics. For Eulerian metrics, synoptic time scale eddy kinetic energy at 850 hPa relates strongly to both precipitation and wind impacts. -

Challenges and Prospects in Ocean Circulation Models
Challenges and Prospects in Ocean Circulation Models The MIT Faculty has made this article openly available. Please share how this access benefits you. Your story matters. Citation Fox-Kemper, Baylor, et al. “Challenges and Prospects in Ocean Circulation Models.” Frontiers in Marine Science 6 (February 2019): 65. © The Authors As Published http://dx.doi.org/10.3389/fmars.2019.00065 Publisher Frontiers Media SA Version Final published version Citable link https://hdl.handle.net/1721.1/125142 Terms of Use Creative Commons Attribution 4.0 International license Detailed Terms https://creativecommons.org/licenses/by/4.0/ REVIEW published: 26 February 2019 doi: 10.3389/fmars.2019.00065 Challenges and Prospects in Ocean Circulation Models Baylor Fox-Kemper 1*, Alistair Adcroft 2,3, Claus W. Böning 4, Eric P. Chassignet 5, Enrique Curchitser 6, Gokhan Danabasoglu 7, Carsten Eden 8, Matthew H. England 9, Rüdiger Gerdes 10,11, Richard J. Greatbatch 4, Stephen M. Griffies 2,3, Robert W. Hallberg 2,3, Emmanuel Hanert 12, Patrick Heimbach 13, Helene T. Hewitt 14, Christopher N. Hill 15, Yoshiki Komuro 16, Sonya Legg 2,3, Julien Le Sommer 17, Simona Masina 18, Simon J. Marsland 9,19,20, Stephen G. Penny 21,22,23, Fangli Qiao 24, Todd D. Ringler 25, Anne Marie Treguier 26, Hiroyuki Tsujino 27, Petteri Uotila 28 and Stephen G. Yeager 7 1 Department of Earth, Environmental, and Planetary Sciences, Brown University, Providence, RI, United States, 2 Atmospheric and Oceanic Sciences Program, Princeton University, Princeton, NJ, United States, 3 NOAA Geophysical -

Dynamic Load Balancing for Predictions of Storm Surge and Coastal Flooding
Environmental Modelling and Software 140 (2021) 105045 Contents lists available at ScienceDirect Environmental Modelling and Software journal homepage: http://www.elsevier.com/locate/envsoft Dynamic load balancing for predictions of storm surge and coastal flooding Keith J. Roberts a,1,*, J. Casey Dietrich b, Damrongsak Wirasaet a, William J. Pringle a, Joannes J. Westerink a a Dept. of Civil and Environmental Engineering and Earth Sciences, University of Notre Dame, 156 Fitzpatrick Hall, Notre Dame, IN, USA b Dept. of Civil, Construction and Environmental Engineering, North Carolina State University, Mann Hall, USA ARTICLE INFO ABSTRACT Keywords: As coastal circulation models have evolved to predict storm-induced flooding, they must include progressively Storm surge more overland regions that are normally dry, to where now it is possible for more than half of the domain to be Coastal flooding needed in none or only some of the computations. While this evolution has improved real-time forecasting and Dynamic load balancing long-term mitigation of coastal flooding,it poses a problem for parallelization in an HPC environment, especially Finite element modeling for static paradigms in which the workload is balanced only at the start of the simulation. In this study, a dy Zoltan toolkit ParMETIS namic rebalancing of computational work is developed for a finite-element-based, shallow-water, ocean circu lation model of extensive overland flooding.The implementation has a low overhead cost, and we demonstrate a realistic hurricane-forced coastal -

1.1 the Climatology of Inland Winds from Tropical Cyclones in the Eastern United States
1.1 THE CLIMATOLOGY OF INLAND WINDS FROM TROPICAL CYCLONES IN THE EASTERN UNITED STATES Michael C. Kruk* STG Inc., Asheville, North Carolina Ethan J. Gibney IMSG Inc., Asheville, North Carolina David H. Levinson and Michael Squires NOAA National Climatic Data Center, Asheville, NC landfall than do weaker storms. For these reasons, the 1. Introduction primary impact areas of tropical cyclones are generally found along coastal (or near coastal) regions. Most In the United States, the impacts from tropical previous studies involving the inland-extent of tropical cyclones often extend well-inland after these storms cyclones have generally focused on their expected or make landfall along the coast. For example, after the modeled rate of decay post landfall (e.g., Tuleya et al. passage of Hurricane Camille (1969), more than 150 1984, Kaplan and DeMaria 1995; Kaplan and DeMaria casualties occurred in the state of Virginia, some 1300 2001), while others have focused on recurrence km inland from where the storm originally made landfall thresholds or probabilities of landfalls along a given along the Louisiana coast (Emanuel 2005). According to portion of the United States coastline (e.g., Bove et al. Rappaport (2000), a large portion of fatalities often occur 1998; Elsner and Bossak 2001; Gray and Klotzbach inland associated with a decaying tropical cyclone’s 2005; Saunders and Lea 2005). Results from Kaplan winds (falling trees, collapsed roofs, etc.) and heavy and DeMaria (1995) showed an idealized scenario for flooding rains. In the 1970s, ‘80s, and ‘90s, freshwater the maximum possible inland wind speed of a decaying floods accounted for 59 percent of the recorded deaths tropical cyclone based on both intensity at landfall and from tropical cyclones (Rappaport 2000), and such forward motion for the Gulf Coast and southeastern floods are often a combination of meteorological and United States, and for the New England area (Kaplan hydrological factors. -
Hazus Hurricane Model User Guidance
Hazus Hurricane Model User Guidance April 2018 Document History Affected Section or Date Description Subsection First publication using April 2018 Updated user manual from Hazus version 2.1 to Hazus version this format 4.2. Manual has been reorganized from prior version. Table of Contents 1 INTRODUCTION ................................................................................................................................................... 1-1 1.1 Hazus Users and Applications .................................................................................................. 1-1 1.2 Hurricane Model Outputs .......................................................................................................... 1-2 1.3 Assumed User Expertise .......................................................................................................... 1-3 1.4 When to Seek Help ................................................................................................................... 1-4 1.5 Technical Support ..................................................................................................................... 1-4 1.6 Uncertainties in Loss Estimates ............................................................................................... 1-5 1.7 Organization of User Guidance ................................................................................................ 1-5 2 OVERVIEW OF THE HURRICANE MODEL ........................................................................................................ -

1 Orographic Effects on Supercell: Development and Structure
Orographic Effects on Supercell: Development and Structure, Intensity and Tracking Galen M. Smith1, Yuh-Lang Lin1,2,@, and Yevgenii Rastigejev1,3 1Department of Energy and Environmental Systems 2Department of Physics 3Department of Mathematics North Carolina A&T State University March 1, 2016 @Corresponding Author Address: Dr. Yuh-Lang Lin, 302H Gibbs Hall, EES, North Carolina A&T State University, 1601 E. Market St., Greensboro, NC 27411. Email: [email protected]. Web: http://mesolab.ncat.edu Abstract Orographic effects on tornadic supercell development, propagation, and structure are investigated using Cloud Model 1 (CM1) with idealized bell-shaped mountains of various heights and a homogeneous fluid flow with a single sounding. It is found that blocking effects are dominative compared to the terrain-induced environmental heterogeneity downwind of the mountain. The orographic effect shifted the track of the storm towards the the left of storm motion, particularly on the lee side of the mountain, when compared to the track in the case with no mountain. The terrain blocking effect also enhanced the supercells inflow, which was increased more than one hour before the storm approached the terrain peak. This allowed the central region of the storm to exhibit clouds with a greater density of hydrometeors than the control. Moreover, the enhanced inflow increased the areal extent of the supercells precipitation, which, in turn enhanced the cold pool outflow serving to enhance the storm’s updraft until becoming strong enough to undercut and weaken the storm considerably. Another aspect of the orographic effects is that down slope winds produced or enhanced low-level vertical vorticity directly under the updraft when the storm approached the mountain peak. -

Manuscript with All Authors Reviewing and Contributing in Various Proportion to Sections
A dynamic and thermodynamic analysis of the 11 December 2017 tornadic supercell in the Highveld of South Africa Lesetja E. Lekoloane1,2, Mary-Jane M. Bopape1, Gift Rambuwani1, Thando Ndarana3, Stephanie Landman1, Puseletso Mofokeng1,4, Morne Gijben1, and Ngwako Mohale1 1South African Weather Service, Pretoria, 0001, South Africa 2Global Change Institute, University of the Witwatersrand, Johannesburg, 2050, South Africa 3Department of Geography, Geoinformatics and Meteorology, University of Pretoria, Pretoria, 0001, South Africa 4School of Geography, Archaeology and Environmental Studies, University of the Witwatersrand, Johannesburg, 2050, South Africa Correspondence: Lesetja Lekoloane ([email protected]) Abstract. On 11 December 2017, a tornadic supercell initiated and moved through the northern Highveld region of South Africa for 7 hours. A tornado from this supercell led to extensive damage to infrastructure and caused injury to and displacement of over 1000 people in Vaal Marina, a town located in the extreme south of the Gauteng Province. In this study we conducted an analysis in order to understand the conditions that led to the severity of this supercell, including the formation 5 of a tornado. The dynamics and thermodynamics of two configurations of the Unified Model (UM) were also analysed to assess their performance in predicting this tornadic supercell. It was found that this supercell initiated as part of a cluster of multicellular thunderstorms over a dryline, with three ingredients being important in strengthening and maintaining it for 7 hours: significant surface to mid-level vertical shear, an abundance of low-level warm moisture influx from the tropics and Mozambique Channel, and the relatively dry mid-levels (which enhanced convective instability).