Uniflex: a Framework for Simplifying Wireless Network Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Reviewing Real-Time Performance of Nuclear Reactor Safety Systems
NUREG/CR-6083 UCRL-ID-114565 Reviewing Real-Time Performance of Nuclear Reactor Safety Systems Prepared by G. G. Preckshot Lawrence Livermore National Laboratory Prepared for U.S. Nuclear Regulatory Commission AVAILABIUTY NOTICE Availability of Reference Materials Cited in NRC Publications Most documents cited In NRC publications will be available from one of the following sources: I, The NRC Public Document Room, 2120 L Street, NW, Lower Level. Washington, DC 20555-0001 2. The Superintendent of Documents, U.S. Government Printing Office, Mall Stop SSOP, Washington. DC 20402-9328 3. The National Technical Information Service, Springfield, VA 22161 Although the Hating that follows represents the majority of documents cited in NRC publications, it Is not intended to be exhaustive. Referenced documents available for inspection and copying for a fee from the NRC Public Document Room Include NRC correspondence and Internal NRC memoranda; NRC Office of Inspection and Enforcement bulletins, circulars, Information notices, Inspection and investigation notices: Licensee Event Reports; ven- dor reports and correspondence; Commission papers; and applicant and licensee documents and corre- spondence. The following documents In the NUREG series are available for purchase from the GPO Sales Program: formal NRC staff and contractor reports, NRC-sponsored conference proceedings, and NRC booklets and brochures. Also available are Regulatory Guides. NRC regulations In the Code of Federal Regulations, and Nuclear Regulatory Commission Issuances. Documents available from the National Technical Information Service Include NUREG series reports and technical reports prepared by other federal agencies and reports prepared by the Atomic Energy Commis- sion, forerunner agency to the Nuclear Regulatory Commission. Documents available from public and special technical libraries Include all open literature items, such as books, Journal and periodical articles, and transactions. -

Objective Is
Lehigh Preserve Institutional Repository Design of a microprocessor-based emulsion polymerization process control facility Dimitratos, John N. 1987 Find more at https://preserve.lib.lehigh.edu/ This document is brought to you for free and open access by Lehigh Preserve. It has been accepted for inclusion by an authorized administrator of Lehigh Preserve. For more information, please contact [email protected]. Design of a Microprocessor-based Emulsion Polymerization Process Control Facility A research report written in partial fulfillment of the requirements for the degree of Master of Science in Chemical F:ngim·ering, Lehigh University, Bethlehem, Pennsylvania by John N. Dimitratos June 1987 ,. Design of a Microprocessor-based Emulsion Polymerization .. ,_.,,-•• ·, ,, -i •:>:.·.:':' Process Control Facility ' A research report written in partial fulfillment of the requirements for the degree of Master of Science in Chemical Engineering, Lehigh University, Bethlehem, Pennsylvania by John N. Dimitratos June 1987 •1 to my father and my brother there art times when it is hard to decide what should be chosen at what price, and what endured in return for what reward. Perhaps it is still harder to stick to the decision Aristotle (384-322 B.C) Ethics, Book Ill. Abstract The explosion of microcomputer technology and the recent developments in software and hardware products introduce a new horizon of capabilities for the process control engineer. However, taking advantage of this new technology is not something easily done. H the process control engineer has to undertake such a project soon he will have to deal with the different languages the software engineer and the plant operator use. -
Flexconfigure User Guide
P/I Enterprise Manager Version: 1.4 FlexConfigure User Guide Pitney Bowes1 is making this document available to you, free of charge, for use with the software, in order to make your experience more convenient. Every effort has been made to ensure the accuracy and usefulness of this document reflecting our experience. Product information may change after publication without notice. This document is being distributed on an "as is" basis and we make no representations or warranties, express or implied, with respect to its accuracy, reliability or completeness and the entire risk of its use shall be assumed by you. In no event shall we be liable to you or any other person, regardless of the cause, for the effectiveness or accuracy of this document or for any special, indirect, incidental or consequential damages arising from or occasioned by your use, even if advised of the possibility of such damages. All software described in this document is either our software and/or our licensed property. No license either expressed or implied is granted for the use of the software by providing this document and/or content. Under copyright law, neither this document nor the software may be copied, photocopied, reproduced, transmitted, or reduced to any electronic medium or machine-readable form, in whole or in part, without our prior written consent. We will continue to maintain this document and we welcome any clarifications or additional information regarding its content. Address comments concerning the content of this publication to: Pitney Bowes Building 600 6 Hercules Way Leavesden Watford WD25 7GS United Kingdom We may use or distribute the information supplied in any way we deem appropriate without incurring any obligation to the submitter of the information 1 Copyright © Pitney Bowes Software. -
GMX 68020 Development System
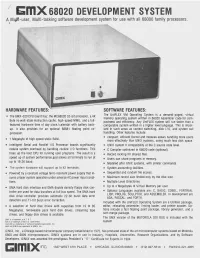
I . ,· s:mxsao20 DEVELOPMENT SYSTEM A MLJ;)~-user, Multi-tasking software development system for use with all 68000 family processors . .. HARDWARE FEATURES: SOFTWARE FEATURES: • The GMX-020 CPU board has: the MC68020 32-bit processor, a 4K The UniFLEX VM Operating System is a demand-paged, virtual memory operating system written in 68020 Assembler code for com Byte no wait-state instruction cache, high-speed MMU, and a full pactness and efficiency. Any UniFLEX system will run faster than a featu red hardware time of day clock I calendar with battery back comparable system written in a higher level language. This is impor up. It also provides for an optional 68881 floating point co tant in such areas as context switching, disk 1/0, and system call processor. handling. Other features include: • compact, efficient Kernel and modules allows handling more users • 1 Megabyte of high speed static RAM. more effectively than UNIX systems, using much less disk space. • Intelligent Serial and Parallel I /0 Processor boards significantly • UN IX system V compatibility at the C source code level. reduce system overhead by handling routine I /0 functions. This • C Compiler optimized in 68020 code (optional). frees up the host CPU for running user programs. The result is a • Record locking for shared files. speed up of system performanca.,.and allows all terminals to run at • Users can share programs in memory. up to 19.2K baud. • Modeled after UNIX systems, with similar commands. • The system hardware will support up to ~"42 terminals. • System accounting facilities. • Powered by a constant voltage ferro-resonant power supply that in • Sequential and random file access. -

DOCUMENT RESUME AUTHOR Helal, Ahmed H
DOCUMENT RESUME ED 406 980 IR 056 355 AUTHOR Helal, Ahmed H., Ed.; Weiss, Joachim W., Ed. TITLE Towards a Worldwide Library: A Ten Year Forecast. Proceedings of the International Essen Symposium (19th, Essen, Germany, September 23-26, 1996). Publications of Essen University Library, No. 21. INSTITUTION Essen Univ. (Germany). Library. REPORT NO ISSN-0931-7503; ISBN-3-922602-22-3 PUB DATE 97 NOTE 354p. PUB TYPE Collected Works - Proceedings (021) EDRS PRICE MF01/PC15 Plus Postage. DESCRIPTORS Academic Libraries; Access to Information; *Electronic Libraries; Foreign Countries; *Futures (of Society); Higher Education; Information Dissemination; *Information Technology; Internet; Librarians; Library Administration; *Library Development; *Library Role; Library Services; Organizational Change; Research Libraries; Strategic Planning; *Technological Advancement; Total Quality Management; World Wide Web IDENTIFIERS Information Age ABSTRACT The 25 papers presented at this symposium focus on the future of libraries and library services in an ever evolving Information Age. The papers deal with topics such as: economic and political issues in determining the future of the professionally managed library; adding value to library services; the need for librarians and library educators who are masters of both book forms and electronic information retrieval; the revival of the Ancient Library of Alexandria project; managing organizational change; strategic planning and management of change; the local academic library within the worldwide context; choice -

Enterprise Manager FLEXCONFIGURE USER GUIDE
Enterprise Manager Version: 1.4.1 FlexConfigure User Guide Pitney Bowes1 is making this document available to you, free of charge, for use with the software, in order to make your experience more convenient. Every effort has been made to ensure the accuracy and usefulness of this document reflecting our experience. Product information may change after publication without notice. This document is being distributed on an "as is" basis and we make no representations or warranties, express or implied, with respect to its accuracy, reliability or completeness and the entire risk of its use shall be assumed by you. In no event shall we be liable to you or any other person, regardless of the cause, for the effectiveness or accuracy of this document or for any special, indirect, incidental or consequential damages arising from or occasioned by your use, even if advised of the possibility of such damages. All software described in this document is either our software and/or our licensed property. No license either expressed or implied is granted for the use of the software by providing this document and/or content. Under copyright law, neither this document nor the software may be copied, photocopied, reproduced, transmitted, or reduced to any electronic medium or machine-readable form, in whole or in part, without our prior written consent. We will continue to maintain this document and we welcome any clarifications or additional information regarding its content. Address comments concerning the content of this publication to: Pitney Bowes Building 600 6 Hercules Way Leavesden Watford WD25 7GS United Kingdom We may use or distribute the information supplied in any way we deem appropriate without incurring any obligation to the submitter of the information 1 Copyright © Pitney Bowes Software. -

Uniflex Registered in Dos. Patf:'?1T.,And Trademark Office) Is a State-Of-The-Art Operat-Lllg L'ly(>U"1Il Fo:~,: Microcomputers
General UniFLEX$ Information I. General Information The UniFLEX$ Operating System (®UniFLEX Registered in DoS. Patf:'?1t.,and Trademark Office) is a state-of-the-art operat-Lllg l'ly(>U"1Il fo:~,: microcomputers. The system's design has been influenced pri1Mrily-:by two other operating systems, FLEX'" and UNIX'" ("'FLEX is a t:i7Stdemark.:9f Technical Systems Consultants; "'UNIX is a trademark of AT&T Be1.~., Laboratories). UniFLEX retains the flexibility and ease of 'use o~ FLEX. while incorporating some of the widely accepted structures of UNIX. UniFLEX is a true nrulti-tasking, multi-user operating syatem. Each user ':;~ c01lDD.unicates with the system through a terminal and may execute any of;::.",.: the available system programs. This implies that one U9f:!I' may bE;i'. :.. running the text editor while another is running BASIC while still another is running the C compiler. Not only may different Ufi:ers ·run,. different programs simultaneously, but one user may be running:, f!everal programs at a time. For example, a compiler run on one Hie co:uld be started, while making changes in another file with the editor".8,LThe system would inform the user when the compilation is completed. Each user must 'log in' before being permitted to use the syste.m. Th.e log in process requires the user to enter a user name, follOW,ed by a,· password. The system checks the validity of the password, and:if·. '.'{, accepted, the system command language program (the 'shell') is run. >: Full system accounting is supported by UniFLEX which will keep tr.!\\ck: 'Qf,: ~_c. -
Evaluation of Real Time Operating System
KINS/HR-719 eiS fl*l|7|# 7H^ Development of Nuclear Safety Regulation Technology qxie tii^* ii(h ya Development of the Safety Regulation Technology for Digital Instrumentation and Control Systems i!A|2i e831 all @7|7|#0|| as 21? Evaluation of Real Time Operating System 2006. 2 flBta?7|a : Sti-CHttH ^ 9?X||7|# 7H^” 2|-X1|o| Ai|ti3^i|o| "C|X|g 7^Xj|CH fAjpi# 7H^”°| “^A|y ^M\X-\\ S7p|^oil g# Siti SLZLAis xi|##L|ck 2006td 2S 28 s : £[^^a^oj-S7|-o, ^o^*!joi;q. : g # s| o|Ei- :: # #]R ^|E[Od^5HOIX(- :: o| S ■*/> £ ^ 04 ^ f ^ :; 5: # % -1-! o| u-tn 0| § & 5| £ i o I. 4 ^ #4# e#44 ## ## ii. # is^ 4# ##4 # 4W44 4## #44 ### ##4 4#4 #4 4 4# 7l4o] 7]# oj.yg.3L 7]4#& 444-s $14. oj## 44 44 #^ 44 & 44=4# #444s #7M4-7]] 44# 444 s##$lw4, 4#4^ 44 4# 4#444#s 44#-44.o a. y^jsjji #y. ojy ## 44#-44 # 4# 44^1 4^4 4 4#4 4 #^#s, s4=m(drift) 444 4^-4, 4#s, ##s, 4444 4=4, sejji W#S#s 44 7j-#*& ### 4" $144 7j-# 4 #4-s* 4 $144 4##- 7Mji ##. zi44- 44# 444 ##szt 444 44 4# #4(4, 4s, es, #4-#, 47]-#, #7] 4)4 4##s, 4 44- SSZL4# W#4 44=44 444M s# 7j-^#oj e 4W& 444s $14-. 44, #7j-^y#^ #44^-4 44# 7]## 4## 4# 44#444 ## 444 s ###31 444^ ^sw#4 S4-7]- oj.y-g.3i #JE44S4 f 44$1# 444 #4S4-& f#s# 4^ $14 444, 4# 4#44 4^1 44 #-7]u> 4444444 4# #4# $K Safety Concerns) W 3. -
Introl-C Brochure.Pdf
INTROL-C/6809 C LANGUAGE DEVELOPMENT SYSTEM Introl-C/6809 is a powerful C language compiler system that is designed to facilitate the development of high-efficiency software for the 6809. The Introl-C package includes a C Compiler, 6809 Relocating Assembler, Linker, Loader, Library Manager, and Standard Library. It has been in the field since early 1982 and has gained widespread acceptance among users for its reliable and comprehensive support of the C language as well as its ease of use. Its ability to generate exceptionally compact, fast executing code has long distinguished the Introl-C implementation as being the most efficient high level language that is available for the 6809 and has resulted in Introl-C's widespread use in the industrial community for development of process control software. Programs developed using Introl-C are typically within 15 to 20% or less of the size and speed of programs written entirely in 6809 assembler. For the particular case of the Eratosthenes Sieve Benchmark, the p/n UC6809 resident Introl-C Compiler, for example, produces a 176 byte compiled module, a total program size of 2007 bytes, and a program execute time of 8 seconds on a 2 Mhz 6809. Code produced under lntrol-C is re-entrant, relocatable, and ROMable and may be installed on any 6809 target, including ROM-based systems. No fees or royalties of any type are imposed on object code programs developed using the compiler. Introl-C/6809 is available as resident software for 6809-based hosts running UniFlex, Flex, or 0S9. Cross-software versions of Introl-C are available for PDP-11 based hosts running UNIX (or any of the URIX look-alikes such as TNIX, VENIX, etc), PDP-11 based hosts running RSX11M, and also for IBM PC hosts running PC DOS or MDOS. -
Kermit News March 1995 Brazil: Election Day 1994
Number 6 Kermit News March 1995 Brazil: Election Day 1994 Brazil's October 1994 general election was almost certainly the world's largest and most complex ever. Kermit software played a crucial role. In Rio de Janeiro, ballots are transcribed to PCs for transmission to the tabulating center by MS-DOS Kermit. Article on page 19. Kermit News Number 6, March 1995 CONTENTS Editor's Notes . 1 New Releases MS-DOS Kermit 3.14 . 3 and BBSs . 4 and Business Communication . 5 C-Kermit 5A(190) . 6 for UNIX . 6 for VMS . 7 for OS/2 . 7 for Stratus VOS . 10 IBM Mainframe Kermit-370 4.3.1 . 11 Digital PDP-11 Kermit-11 3.62-8 . 11 Other New Kermit Releases . 11 New Features File Transfer Recovery . 12 Auto-Upload, Auto-Download, Auto-Anything . 12 Character Sets: Circumnavigating the Web with MS-DOS Kermit . 15 People and Places Cover Story: Kermit in the Brazilian Elections. 19 Kermit Helps Automate Mail Delivery . 23 Kermit and Market Research in the UK . 24 Computer Access for Persons with Print-Handicaps . 25 Down to Business Ordering Information . 28 Kermit Version List . 29 Order Form . 31 Kermit News (ISSN 0899-9309) is published periodically free of charge by Kermit Development and Distribution, Columbia University Academic Information Systems, 612 West 115th Street, New York, NY 10025, USA. Contributed articles are welcome. Editor: Christine M. Gianone E-Mail: cmg@ columbia.edu Copyright 1995, Trustees of Columbia University in the City of New York. Material in Kermit News may be quoted or reproduced in other publications without permis- sion, but with proper attribution. -

Flexus Getting Started Guide
Flexus Getting Started Guide Flexus 3.0.0 11/29/2007 Guide author: Evangelos Vlachos SimFlex Project Team Eric Chung, Michael Ferdman, Brian Gold, Nikos Hardavellas, Jangwoo Kim, Ippokratis Pandis, Minglong Shao, Jared Smolens, Stephen Somogyi, Evangelos Vlachos, Thomas Wenisch, Roland Wunderlich, Anastassia Ailamaki, Babak Falsafi and James C. Hoe Legal Notices Redistributions of any form whatsoever must retain and/or include the following acknowledgment, notices and disclaimer: This product includes software developed by Carnegie Mellon University. Copyright 2007 by Eric Chung, Michael Ferdman, Brian Gold, Nikos Hardavellas, Jangwoo Kim, Ippokratis Pandis, Minglong Shao, Jared Smolens, Stephen Somogyi, Evangelos Vlachos, Thomas Wenisch, Anastassia Ailamaki, Babak Falsafi and James C. Hoe for the SimFlex Project, Computer Architecture Lab at Carnegie Mellon, Carnegie Mellon University. For more information, see the SimFlex project website at: http://www.ece.cmu.edu/~simflex You may not use the name "Carnegie Mellon University" or derivations thereof to endorse or promote products derived from this software. If you modify the software you must place a notice on or within any modified version provided or made available to any third party stating that you have modified the software. The notice shall include at least your name, address, phone number, email address and the date and purpose of the modification. THE SOFTWARE IS PROVIDED "AS-IS" WITHOUT ANY WARRANTY OF ANY KIND, EITHER EXPRESS, IMPLIED OR STATUTORY, INCLUDING BUT NOT LIMITED TO ANY WARRANTY THAT THE SOFTWARE WILL CONFORM TO SPECIFICATIONS OR BE ERROR-FREE AND ANY IMPLIED WARRANTIES OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, TITLE, OR NON-INFRINGEMENT. -
CX Implementation & Maintenance Technical Manual
CX Implementation and Maintenance Technical Manual Copyright (c) 2001 Jenzabar, Inc. All rights reserved. You may print any part or the whole of this documentation to support installations of Jenzabar software. Where the documentation is available in an electronic format such as PDF or online help, you may store copies with your Jenzabar software. You may also modify the documentation to reflect your institution's usage and standards. Permission to print, store, or modify copies in no way affects ownership of the documentation; however, Jenzabar, Inc. assumes no responsibility for any changes you make. Filename: tmcximmt Distribution Date: 02/01/2002 Contact us at www.jenzabar.com Jenzabar CX and QuickMate are trademarks of Jenzabar, Inc. INFORMIX, PERFORM, and ACE are registered trademarks of the IBM Corporation Impromptu, PowerPlay, Scenario, and Cognos are registered trademarks of the Cognos Corporation UNIX is a registered trademark in the USA and other countries, licensed exclusively through X/Open Company Limited Windows is a registered trademark of the Microsoft Corporation All other brand and product names are trademarks of their respective companies JENZABAR, INC. CX IMPLEMENTATION AND MAINTENANCE TECHNICAL MANUAL TABLE OF CONTENTS USING THIS MANUAL................................................................................................................................. 1 Overview....................................................................................................................................................