Software Power Analysis and Optimization for Power-Aware Multicore Systems Shinan Wang Wayne State University
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

P5W64 WS Professional
P5W64 WS Professional Motherboard E2846 Second Edition V2 September 2006 Copyright © 2006 ASUSTeK COMPUTER INC. All Rights Reserved. No part of this manual, including the products and software described in it, may be reproduced, transmitted, transcribed, stored in a retrieval system, or translated into any language in any form or by any means, except documentation kept by the purchaser for backup purposes, without the express written permission of ASUSTeK COMPUTER INC. (“ASUS”). Product warranty or service will not be extended if: (1) the product is repaired, modified or altered, unless such repair, modification of alteration is authorized in writing by ASUS; or (2) the serial number of the product is defaced or missing. ASUS PROVIDES THIS MANUAL “AS IS” WITHOUT WARRANTY OF ANY KIND, EITHER EXPRESS OR IMPLIED, INCLUDING BUT NOT LIMITED TO THE IMPLIED WARRANTIES OR CONDITIONS OF MERCHANTABILITY OR FITNESS FOR A PARTICULAR PURPOSE. IN NO EVENT SHALL ASUS, ITS DIRECTORS, OFFICERS, EMPLOYEES OR AGENTS BE LIABLE FOR ANY INDIRECT, SPECIAL, INCIDENTAL, OR CONSEQUENTIAL DAMAGES (INCLUDING DAMAGES FOR LOSS OF PROFITS, LOSS OF BUSINESS, LOSS OF USE OR DATA, INTERRUPTION OF BUSINESS AND THE LIKE), EVEN IF ASUS HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES ARISING FROM ANY DEFECT OR ERROR IN THIS MANUAL OR PRODUCT. SPECIFICATIONS AND INFORMATION CONTAINED IN THIS MANUAL ARE FURNISHED FOR INFORMATIONAL USE ONLY, AND ARE SUBJECT TO CHANGE AT ANY TIME WITHOUT NOTICE, AND SHOULD NOT BE CONSTRUED AS A COMMITMENT BY ASUS. ASUS ASSUMES NO RESPONSIBILITY OR LIABILITY FOR ANY ERRORS OR INACCURACIES THAT MAY APPEAR IN THIS MANUAL, INCLUDING THE PRODUCTS AND SOFTWARE DESCRIBED IN IT. -
Website Designing, Overclocking
Computer System Management - Website Designing, Overclocking Amarjeet Singh November 8, 2011 Partially adopted from slides from student projects, SM 2010 and student blogs from SM 2011 Logistics Hypo explanation Those of you who selected a course module after last Thursday and before Sunday – Apologies for I could not assign the course module Bonus deadline for these students is extended till Monday 5 pm (If it applies to you, I will mention it in the email) Final Lab Exam 2 weeks from now - Week of Nov 19 Topics will be given by early next week No class on Monday (Nov 19) – Will send out relevant slides and videos to watch Concerns with Videos/Slides created by the students Mini project Demos: Finish by today Revision System Cloning What is it and Why is it useful? What are different ways of cloning the system? Data Recovery Why is it generally possible to recover data that is soft formatted or mistakenly deleted? Why is it advised not to install any new software if data is to be recovered? Topics For Today Optimizing Systems Performance (including Overclocking) Video by Vaibhav, Shubhankar and Mukul - http://www.youtube.com/watch?v=FEaORH5YP0Y&feature=youtu.be Creating a basic website A method of pushing the basic hardware components beyond the default limits Companies equip their products with such bottle-necks because operating the hardware at higher clock rates can damage or reduce its life span OCing has always been surrounded by many baseless myths. We are going to bust some of those. J Slides from Vinayak, Jatin and Ashrut (2011) The primary benefit is enhanced computer performance without the increased cost A common myth is that CPU OC helps in improving game play. -

Test Drive Report for Intel Pentium 4 660
Test Drive Report for Intel Pentium 4 660 The Pentium 4 600 series processors from Intel may not hold an upper hand over their 500 series brethren in terms of clock frequencies, but they do sport quite a few significant new features: support for EM64T as well as EIST technology (for the reduction of processor power consumption and heat), and, very importantly, a series-wide upgrade to 2MB L2 Cache. Overall, the technical advances that have been achieved are rather obvious. First, a tech spec comparison chart is listed below: Pentium 4 5XX Pentium 4 6XX Model number 570, 560, 550, 540, 530, 520 660, 650, 640, 630 Clock speed 2.8 – 3.8GHz 3.0 – 3.6GHz FSB 800MHz 800MHz L2 Cache 1024KB 2048KB EM64T None Yes EDB Yes* Yes EIST None Yes Transistors 125m 169m Die size 112mm2 135mm2 *Only J-suffix 500 series processors (e.g. 560J, 570J) support EDB technology. From the outside, the new Pentium 4 600 series processors are completely identical to the Pentium 4 500 series processors. The 600 series continue to use the Prescott core, but its L2 Cache is enlarged to 2MB, resulting in increased transistor count and die size. CPU-Z Information Comparison Pentium 4 560 Pentium 4 660 “X86-64” appears in the Instructions caption for the Pentium 4 660. Both AMD’s 64-bit computing and Intel’s EM64T technologies belong to the x86-64 architecture, which means that these are expanded from traditional x86 architecture. Elsewhere, the two processors are shown to have different L2 Cache sizes. -
SY-6VBA133-B Motherboard
SY-6VBA133-B Motherboard **************************************************** Pentium® III, Pentium® II & CeleronÔ Processor supported Apollo Pro133 AGP/PCI Motherboard 66/100/133 MHz Front Side Bus supported ATX Form Factor **************************************************** User's Manual SOYO™ SY-6VBA133-B Copyright © 1999 by Soyo Computer Inc. Trademarks: Soyo is the registered trademark of Soyo Computer Inc. All trademarks are the properties of their owners. Product Rights: All names of the product and corporate mentioned in this publication are used for identification purposes only. The registered trademarks and copyrights belong to their respective companies. Copyright Notice: All rights reserved. This manual has been copyrighted by Soyo Computer Inc. No part of this manual may be reproduced, transmitted, transcribed, translated into any other language, or stored in a retrieval system, in any form or by any means, such as by electronic, mechanical, magnetic, optical, chemical, manual or otherwise, without permission in writing from Soyo Computer Inc. Disclaimer: Soyo Computer Inc. makes no representations or warranties regarding the contents of this manual. We reserve the right to amend the manual or revise the specifications of the product described in it from time to time without obligation to notify any person of such revision or amend. The information contained in this manual is provided to our customers for general use. Customers should be aware that the personal computer field is subject to many patents. All of our customers should ensure that their use of our products does not infringe upon any patents. It is the policy of Soyo Computer Inc. to respect the valid patent rights of third parties and not to infringe upon or to cause others to infringe upon such rights. -
Lawrence Butcher Reports on Recent Developments in ECU Technology and Their Impact on Engine Design
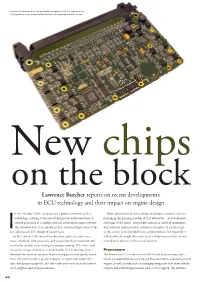
The main circuit board from a programmable competition ECU. The appearance of SoC (system on chip) devices will see the size and complexity of these units fall New chips on the block Lawrence Butcher reports on recent developments in ECU technology and their impact on engine design n RET 46 (May 2010), we gave you a general overview of ECU These advances have led to design challenges, however, such as technology, looking at the overall design and implementation of packaging the growing number of I/Os effi ciently – an ever-present control processes in a modern internal combustion engine context. challenge in the space- and weight-conscious world of motorsport. The intention here is to expand on that, and investigate some of the Research into engine control systems is extensive, to say the least, Ikey advances in ECU design in recent years. so this article is not intended to be comprehensive, but hopefully it As the control of the internal combustion engine becomes ever will provide an insight into some areas of improvement that are not more advanced, with processes such as gasoline direct injection and immediately obvious to the casual observer. constantly variable valve timing becoming common, ECUs have had to evolve to cope with these extra demands. Key to meeting these Processors demands has been an increase in processing power and speed, which The heart of an ECU is one or more CPUs (central processing units), have allowed not only a greater capacity for input and output (I/O) which are responsible for carrying out the calculations required to run an data (see glossary page 68), but also faster and more accurate control engine, as well as tasks such as managing integration with other vehicle of an engine’s operating parameters. -
A Survey on Energy-Efficient Data Management
A Survey on Energy-Efficient Data Management Jun Wang, Ling Feng Wenwei Xue, Zhanjiang Song Dept. of CS&T, Tsinghua Univ., Beijing, China Nokia Research Center, Beijing, China [email protected] [email protected] [email protected] [email protected] ABSTRACT was about 1.5% of the total U.S. electricity con- Energy management has now become a critical and ur- sumption in 2006, and this energy consumption is gent issue in green computing. A lot of efforts have been expected to double by 2011 if continuously powering made on energy-efficiency computing at various levels computer servers and data centers using the same from individual hardware components, system software, methods [11].” Xu et al. showed that electricity con- to applications. In this paper, we describe the energy- sumed by computer servers and cooling systems in a efficiency computing problem, as well as possible strate- typical data center contributes to around 20 percent gies to tackle the problem. We survey some recently of the total ownership cost, equivalent to one-third developed energy-saving data management techniques. of the total maintenance cost [42]. When a data Benchmarks and power models are described in the end center reaches its maximum provisioned power, it for the evaluation of energy-efficiency solutions. has to be replaced or augmented at a great expense [33]. In the very near future, energy efficiency is ex- pected to be one of the key purchasing arguments 1. INTRODUCTION in the society. Now and in the future, green computing will be a Nowadays, power and energy have started to seve- key challenge for both information technology and rely constrain the design of components, systems, business. -
IN a NUTSHELL a Desktop Quick Reference
Covers Windows3 & Linux rd Edition PC HARDWARE IN A NUTSHELL A Desktop Quick Reference Robert Bruce Thompson & Barbara Fritchman Thompson PC HARDWARE IN A NUTSHELL Other resources from O’Reilly oreilly.com oreilly.com is more than a complete catalog of O’Reilly books. You’ll also find links to news, events, articles, weblogs, sample chapters, and code examples. oreillynet.com is the essential portal for developers inter- ested in open and emerging technologies, including new platforms, programming languages, and operating systems. Conferences O’Reilly & Associates bring diverse innovators together to nurture the ideas that spark revolutionary industries. We specialize in documenting the latest tools and sys- tems, translating the innovator’s knowledge into useful skills for those in the trenches. Visit conferences.or- eilly.com for our upcoming events. Safari Bookshelf (safari.oreilly.com) is the premier online reference library for programmers and IT professionals. Conduct searches across more than 1,000 books. Sub- scribers can zero in on answers to time-critical questions in a matter of seconds. Read the books on your Book- shelf from cover to cover or simply flip to the page you need. Try it today with a free trial. PC HARDWARE IN A NUTSHELL Third Edition Robert Bruce Thompson and Barbara Fritchman Thompson Beijing • Cambridge • Farnham • Köln • Paris • Sebastopol • Taipei • Tokyo Chapter 4Processors 4 Processors The processor, also called the microprocessor or CPU (for Central Processing Unit), is the brain of the PC. It performs all general computing tasks and coordinates tasks done by memory, video, disk storage, and other system components. The CPU is a very complex chip that resides directly on the motherboard of most PCs, but may instead reside on a daughtercard that connects to the motherboard via a dedicated specialized slot. -

INTEL's TOP CPU the Pentium 4 3.4Ghz Extreme Edition Intel
44> 7625274 81181 Chips and chipsets. They’re the heart of any computing system, and as usual, we have packed this issue of PC Modder with dozens of pos- sible processor and motherboard matchups. Our Case Studies will THE PARTS SHOP help you discover what sort of performance you can expect to 19 AMD’s Top CPU achieve when overclocking various chip and chipset combos. When The Athlon 64 FX53 you’re ready to crank up your own silicon, our Cool It articles will provide tips on keeping excess heat under control. And then when 20 Intel’s Top CPU it’s time to build the ultimate home for your motherboard, our Cut Pentium 4 3.4GHz Extreme Edition It section will give you some case ideas to drool over. Whether you’re a modding novice or master, you’ll find this issue is filled with all the 21 Grantsdale Grants Intel Users’ Wishes tips and tools you need to build faster and more beautiful PCs. New i915 Chipset Adds Many New Technologies 22 Special FX SiS Adds Support For AMD’s FIRST-TIMERS Athlon 64FX CPU 4 The Need For Speed 23 Chipset Entertainment Take Your CPU To Ultimate Heights VIA’s PM880 Chipset One Step At A Time Ready For Media PCs 8 Cutting Holes & Taking Names & HDTV Your First Case Mod 24 May The 12 Water For First-Timers Force Be Tips To Help Watercooling With You Newbies Take The Plunge NVIDIA’s nForce3 Chipset 16 Benchmark Basics A Primer On 25 Essential Overclocking Utilities Measuring Power Modding Is As Much About The Your PC’s Right Software As The Right Hardware Performance 31 Sizing Up Sockets How Your Processor Saddles Up 33 The Mad Modder’s Toolkit Minireviews, Meanderings & Musings Copyright 2004 by Sandhills Publishing Company. -

Motherboards.Org
SY-5SSM V1.1 SY-5SSM/5 V1.1 Super 7 Ô Motherboard ************************************************ Pentium® Class CPU supported SiS530 PCI/AGP Motherboard Micro-ATX Form Factor 3D AGP & Audio On-board ************************************************ User's Guide & Technical Reference SPORTON INTERNATIONAL INC. Declaration of Conformity According to 47 CFR, Part 2 and 15 of the FCC Rules Declaration No.: D920207 1999/3/6 The following designated product EQUIPMENT: Main Board MODEL NO.: SY-5SSM which is the Class B digital device complies with 47 CFR Parts 2 and 15 of the FCC rules. Operation is subject to the following two conditions : (1) this device may not cause harmful interference, and (2) this device must accept any interference received, including interference that may cause undesired operation. The product was tested with the following configuration: Monitor: HITACHI/CM814U PS/2 Keyboard: DELL/GYUM90SK PS/2 Mouse: GENIUS/FSUGMZFC USB Mouse: WINIC/ F4ZFDM-A50 Printer: HP/DS16XU225 Modem: ACEEX/IFAXDM1414 Speaker: JUSTER/SP-1000 Stereo Cassette Player: KOKA/ KW-247 Microphone: KOKA/ SR-M02 Joystick: MICROSOFT/ C3KMJI This declaration is given for the manufacturer SOYO COMPUTER INC. No.21, Wu-Kung 5 Rd., Hsing Chuang City, Taipei Hsien, Taiwan, R.O.C. The test was carried out by SPORTON INTERNATIONAL INC. 6F, No. 106, Hsin Tai Wu Rd., Sec. 1, His Chih, Taipei Hsien, Taiwan, R.O.C SOYO™ SY-5SSM & SY-5SSM/5 V1.1 About This Guide This User's Guide is for assisting system manufacturers and end users in setting up and installing the Motherboard. Information in this guide has been carefully checked for reliability; however, no guarantee is given as to the correctness of the contents. -

Section 1 -- Introduction
Introduction Section 1 -- Introduction 1-1 Package Contents Contents Optional items A. Mainboard H. Extra USB2.0 port cable B. User’s manual I. Thermo Stick cable English C. Floppy drive cable If you need the optional item, please D. HDD drive cable contact your dealer for assistance. E. CD (drivers and utilities) F. I/O Shield G. SATA II data and power cable USER’S E MANUAL C D F A B H I G 1 Introduction 1-2 Mainboard Features Brief Introduction Socket 939 English Socket 939-based motherboards are designed to provide performance enhancements for AMD Sempron /Athlon 64/ Athlon 64 FX / Athlon X2 processor-based systems, and it also expected to be the next-generation of platform innovations. For more information about all the new features AthlonTM Processor deliver, check out the AMD website at http://www.amd.com Chipset The board is designed with ULi M1697 chipset, featuring performance and stability with the most innovative technology and features. For more details about the ULi chipset, please visit the ULi Web site at http://www.ULi.com.tw. GLI mode (Graphics Link Interface) GLI mode allows two PCI-Express VGA cards to be installed on the same mainboard to enjoy dual display experience. With this technology you can expand your desktop space across two monitors and have independent display on each monitor. PCI-Express (PCI-E) Next generation peripheral interface to succeed to current PCI bus for the next decade. With smaller slot size and 250MB/sec (PCI-E*1) or 4GB/sec(PCI-E*16) maximum transfer, PCI-Express overcomes PCI bus bottleneck. -
Sebastian Hodge My Science Project 9/6/15 – 25/6/15
Sebastian Hodge My Science Project 9/6/15 – 25/6/15 CPU Clock Speed and Performance Sebastian Hodge | CPU Clock Speed and Performance Contents Aim ................................................................................................................................................................ 3 Background Information ............................................................................................................................... 3 Introduction .............................................................................................................................................. 3 What is a CPU? What is clock speed? ....................................................................................................... 3 Do two processors with the same GHz have the same performance? ..................................................... 4 How can CPU clock speed be changed? .................................................................................................... 5 How is CPU performance measured? ....................................................................................................... 5 What is this experiment looking to find? .................................................................................................. 6 Hypothesis..................................................................................................................................................... 7 Materials/Equipment ................................................................................................................................... -

Computer Technology an Introduction
APEX TUTORS Page | 1 Computer Technology An Introduction Installation, Configuration, Connection, Troubleshooting A guide to configuring, installing, connecting and troubleshooting computer systems Page | 2 Table of Contents Table of Contents ........................................................................................................... 2 Preface............................................................................................................................ 4 Introduction .................................................................................................................... 5 CHAPTER 1 CPU.......................................................................................................... 7 CPU Packages ................................................................................................................ 7 CHAPTER 2 RAM ...................................................................................................... 19 RAM Variations ........................................................................................................... 22 CHAPTER 3 Hard Drive Technologies ....................................................................... 25 RAID ............................................................................................................................ 32 Implementing RAID .................................................................................................... 34 Solid State Disks .........................................................................................................