Control of NASA's Space Launch System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Space Launch System (Sls) Motors
Propulsion Products Catalog SPACE LAUNCH SYSTEM (SLS) MOTORS For NASA’s Space Launch System (SLS), Northrop Grumman manufactures the five-segment SLS heavy- lift boosters, the booster separation motors (BSM), and the Launch Abort System’s (LAS) launch abort motor and attitude control motor. The SLS five-segment booster is the largest solid rocket motor ever built for flight. The SLS booster shares some design heritage with flight-proven four-segment space shuttle reusable solid rocket motors (RSRM), but generates 20 percent greater average thrust and 24 percent greater total impulse. While space shuttle RSRM production has ended, sustained booster production for SLS helps provide cost savings and access to reliable material sources. Designed to push the spent RSRMs safely away from the space shuttle, Northrop Grumman BSMs were rigorously qualified for human space flight and successfully used on the last fifteen space shuttle missions. These same motors are a critical part of NASA’s SLS. Four BSMs are installed in the forward frustum of each five-segment booster and four are installed in the aft skirt, for a total of 16 BSMs per launch. The launch abort motor is an integral part of NASA’s LAS. The LAS is designed to safely pull the Orion crew module away from the SLS launch vehicle in the event of an emergency on the launch pad or during ascent. Northrop Grumman is on contract to Lockheed Martin to build the abort motor and attitude control motor—Lockheed is the prime contractor for building the Orion Multi-Purpose Crew Vehicle designed for use on NASA’s SLS. -

L AUNCH SYSTEMS Databk7 Collected.Book Page 18 Monday, September 14, 2009 2:53 PM Databk7 Collected.Book Page 19 Monday, September 14, 2009 2:53 PM
databk7_collected.book Page 17 Monday, September 14, 2009 2:53 PM CHAPTER TWO L AUNCH SYSTEMS databk7_collected.book Page 18 Monday, September 14, 2009 2:53 PM databk7_collected.book Page 19 Monday, September 14, 2009 2:53 PM CHAPTER TWO L AUNCH SYSTEMS Introduction Launch systems provide access to space, necessary for the majority of NASA’s activities. During the decade from 1989–1998, NASA used two types of launch systems, one consisting of several families of expendable launch vehicles (ELV) and the second consisting of the world’s only partially reusable launch system—the Space Shuttle. A significant challenge NASA faced during the decade was the development of technologies needed to design and implement a new reusable launch system that would prove less expensive than the Shuttle. Although some attempts seemed promising, none succeeded. This chapter addresses most subjects relating to access to space and space transportation. It discusses and describes ELVs, the Space Shuttle in its launch vehicle function, and NASA’s attempts to develop new launch systems. Tables relating to each launch vehicle’s characteristics are included. The other functions of the Space Shuttle—as a scientific laboratory, staging area for repair missions, and a prime element of the Space Station program—are discussed in the next chapter, Human Spaceflight. This chapter also provides a brief review of launch systems in the past decade, an overview of policy relating to launch systems, a summary of the management of NASA’s launch systems programs, and tables of funding data. The Last Decade Reviewed (1979–1988) From 1979 through 1988, NASA used families of ELVs that had seen service during the previous decade. -
Control of NASA's Space Launch System
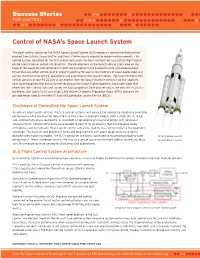
Success Stories FOR CONTROL Control of NASA’s Space Launch System The flight control system for the NASA Space Launch System (SLS) employs a control architecture that evolved from Saturn, Space Shuttle, and Ares I-X while also incorporating modern enhancements. This control system, baselined for the first unmanned launch, has been verified and successfully flight-tested on the Ares I-X rocket and an F/A-18 aircraft. The development of the launch vehicle itself came on the heels of the Space Shuttle retirement in 2011 and will deliver more payload to orbit and produce more thrust than any other vehicle, past or present, opening the way to new frontiers of space exploration as it carries the Orion crew vehicle, equipment, and experiments into new territories. The initial 70-metric-ton vehicle consists of four RS-25 core stage engines from the Space Shuttle inventory, two five-segment solid rocket boosters that are advanced versions of the Space Shuttle boosters, and a core stage that resembles the External Tank and carries the liquid propellant while also serving as the vehicle’s structural backbone. Just above SLS’s core stage is the Interim Cryogenic Propulsion Stage (ICPS), based on the payload motor used by the Delta IV Evolved Expendable Launch Vehicle (EELV). Challenges of Controlling the Space Launch System As with all large launch vehicles, the SLS control system must balance the competing needs of maximizing performance while maintaining robustness to limitations in preflight models. With its high thrust, large size, and multistructural load paths, SLS exhibits a high degree of structural flexion with nonplanar characteristics. -

Launch Vehicle Control Center Architectures
Launch Vehicle Control Center Architectures Michael D. Watson1, Amy Epps2, and Van Woodruff3 NASA Marshall Space Flight Center, Huntsville, AL 35812 Michael Jacob Vachon4 NASA Johnson Space Center, Houston, TX 77058 Julio Monreal5 European Space Agency, Launchers Directorate, Paris, France Marl Levesque6 United Launch Alliance, Vandenberg AFB and Randall Williams7 and Tom McLaughlin8 Aerospace Corporation, El Segundo, CA 90245 Launch vehicles within the international community vary greatly in their configuration and processing. Each launch site has a unique processing flow based on the specific launch vehicle configuration. Launch and flight operations are managed through a set of control centers associated with each launch site. Each launch site has a control center for launch operations; however flight operations support varies from being co-located with the launch site to being shared with the space vehicle control center. There is also a nuance of some having an engineering support center which may be co-located with either the launch or flight control center, or in a separate geographical location altogether. A survey of control center architectures is presented for various launch vehicles including the NASA Space Launch System (SLS), United Launch Alliance (ULA) Atlas V and Delta IV, and the European Space Agency (ESA) Ariane 5. Each of these control center architectures shares some similarities in basic structure while differences in functional distribution also exist. The driving functions which lead to these factors are considered and a model of control center architectures is proposed which supports these commonalities and variations. I. INTRODUCTION Launch vehicles in both Europe and the United States have been operating successfully for several decades. -

2020 Florida Space Day Handout
2020 Florida Space Day is a milestone event that presents an opportunity to educate and bring awareness to Florida legislators on the significance of the aerospace industry and its impact on Florida’s economy. Florikan Scientific Instruments Scientific Lighting Solutions Zero Gravity Solutions BIOS Lighting Sarasota County Palm Beach County Brevard County Palm Beach County Brevard County The aerospace industry represents billions of dollars Has partnered with Supplies Kennedy Space Builds high-speed camera Has developed a micronutrient Is using NASA LED technology in annual economic impact and employs NASA multiple times to Center, as well as other space systems to detect and map formula, BAM-FX, that increases to create lighting systems for create a more robust and medical companies, with lightning strikes before the nutritional value and yield of unique applications, such as thousands of residents in the state’s 67 counties. polymer coating for its silicon diode sensors capable launches. The technology also crops. Nutrient-rich foods like maximizing plant photosynthesis controlled-release of tracking temperatures has applications in protecting these will be necessary for future and inducing wakefulness in fertilizer and to develop hundreds of degrees wind farms and investigating long-term space missions. humans by outputting only fertilizer to meet the below zero. insurance claims. certain wavelengths of light. needs of plants growing in space. 2020 SPACE DAY PARTNERS ECONOMIC DEVELOPMENT COMMISSION FLORIDA’S SPACE COAST FloridaSpaceDay.com » #FLSpaceDay The Florida Space Day is an organized and united effort to communicate to the Governor, Lt. Governor and Legislators an appreciation of their support to the space industry, educate them on the state wide economic impact of space and to develop and advocate for key initiatives that will enhance the competitiveness and viability of the state of Florida in the space sector. -
Exploring Space
EXPLORING SPACE: Opening New Frontiers Past, Present, and Future Space Launch Activities at Cape Canaveral Air Force Station and NASA’s John F. Kennedy Space Center EXPLORING SPACE: OPENING NEW FRONTIERS Dr. Al Koller COPYRIGHT © 2016, A. KOLLER, JR. All rights reserved. No part of this book may be reproduced without the written consent of the copyright holder Library of Congress Control Number: 2016917577 ISBN: 978-0-9668570-1-6 e3 Company Titusville, Florida http://www.e3company.com 0 TABLE OF CONTENTS Page Foreword …………………………………………………………………………2 Dedications …………………………………………………………………...…3 A Place of Canes and Reeds……………………………………………….…4 Cape Canaveral and The Eastern Range………………………………...…7 Early Missile Launches ...……………………………………………….....9-17 Explorer 1 – First Satellite …………………….……………………………...18 First Seven Astronauts ………………………………………………….……20 Mercury Program …………………………………………………….……23-27 Gemini Program ……………………………………………..….…………….28 Air Force Titan Program …………………………………………………..29-30 Apollo Program …………………………………………………………....31-35 Skylab Program ……………………………………………………………….35 Space Shuttle Program …………………………………………………..36-40 Evolved Expendable Launch Program ……………………………………..41 Constellation Program ………………………………………………………..42 International Space Station ………………………………...………………..42 Cape Canaveral Spaceport Today………………………..…………………43 ULA – Atlas V, Delta IV ………………………………………………………44 Boeing X-37B …………………………………………………………………45 SpaceX Falcon 1, Falcon 9, Dragon Capsule .………….........................46 Boeing CST-100 Starliner …………………………………………………...47 Sierra -

Sale Price Drives Potential Effects on DOD and Commercial Launch Providers
United States Government Accountability Office Report to Congressional Addressees August 2017 SURPLUS MISSILE MOTORS Sale Price Drives Potential Effects on DOD and Commercial Launch Providers Accessible Version GAO-17-609 August 2017 SURPLUS MISSILE MOTORS Sale Price Drives Potential Effects on DOD and Commercial Launch Providers Highlights of GAO-17-609, a report to congressional addressees Why GAO Did This Study What GAO Found The U.S. government spends over a The Department of Defense (DOD) could use several methods to set the sale billion dollars each year on launch prices of surplus intercontinental ballistic missile (ICBM) motors that could be activities as it strives to help develop a converted and used in vehicles for commercial launch if current rules prohibiting competitive market for space launches such sales were changed. One method would be to determine a breakeven and assure its access to space. Among price. Below this price, DOD would not recuperate its costs, and, above this others, one launch option is to use price, DOD would potentially save. GAO estimated that DOD could sell three vehicles derived from surplus ICBM Peacekeeper motors—the number required for one launch, or, a “motor set”—at motors such as those used on the Peacekeeper and Minuteman missiles. a breakeven price of about $8.36 million and two Minuteman II motors for about The Commercial Space Act of 1998 $3.96 million, as shown below. Other methods for determining motor prices, such prohibits the use of these motors for as fair market value as described in the Federal Accounting Standards Advisory commercial launches and limits their Board Handbook, resulted in stakeholder estimates ranging from $1.3 million per use in government launches in part to motor set to $11.2 million for a first stage Peacekeeper motor. -

SPACE LAUNCH SYSTEM PAYLOAD TRANSPORTATION BEYOND LEO. S. D. Creech1, J. D. Baker2, A. L. Jackman3 and G. Vane4, 1NASA/MSFC
Planetary Science Vision 2050 Workshop 2017 (LPI Contrib. No. 1989) 8060.pdf SPACE LAUNCH SYSTEM PAYLOAD TRANSPORTATION BEYOND LEO. S. D. Creech1, J. D. Baker2, A. L. Jackman3 and G. Vane4, 1NASA/MSFC Huntsville, AL 35812, [email protected], 2Jet Propulsion Laboratory, Pasadena, CA 91109, [email protected], 3NASA/MSFC Huntsville, AL 35812, [email protected], and 4Jet Propulsion Laboratory, Pasadena, CA 91109, [email protected] Introduction: NASA has successfully completed the Critical Design Review (CDR) of the heavy lift Space Launch System (SLS) and is working towards the first flight of the vehicle in 2018. SLS will begin flying crewed missions with an Orion capsule to the lunar vicinity every year after the first 2 flights starting in the early 2020's. As early as 2021, in addition to delivering an Orion capsule to a cislunar destination, SLS will also deliver ancillary payload, termed “Co- manifested Payload (CPL)”, with a mass of at least 5.5 mT and volume up to 280 m3 simultaneously to that same destination. Later SLS flights have a goal of delivering as much as 10 mT of CPL to cislunar destinations. In addition to cislunar destinations, SLS flights may deliver non-crewed, science-driven missions with Primary Payload (PPL) to more distant destinations. SLS PPL missions will utilize a unique payload fairing offering payload volume (ranging from 320 m3 to 540 m3) that greatly exceeds the largest existing Expendable Launch Vehicle (ELV) fairing available. The Characteristic Energy (C3) offered by the SLS system will generate opportunities to deliver up to 40 mT to cislunar space, and deliver double PPL mass or decrease flight time by half for some outer planet destinations when compared to existing capabilities. -

Alternatives for Future U.S. Space-Launch Capabilities Pub
CONGRESS OF THE UNITED STATES CONGRESSIONAL BUDGET OFFICE A CBO STUDY OCTOBER 2006 Alternatives for Future U.S. Space-Launch Capabilities Pub. No. 2568 A CBO STUDY Alternatives for Future U.S. Space-Launch Capabilities October 2006 The Congress of the United States O Congressional Budget Office Note Unless otherwise indicated, all years referred to in this study are federal fiscal years, and all dollar amounts are expressed in 2006 dollars of budget authority. Preface Currently available launch vehicles have the capacity to lift payloads into low earth orbit that weigh up to about 25 metric tons, which is the requirement for almost all of the commercial and governmental payloads expected to be launched into orbit over the next 10 to 15 years. However, the launch vehicles needed to support the return of humans to the moon, which has been called for under the Bush Administration’s Vision for Space Exploration, may be required to lift payloads into orbit that weigh in excess of 100 metric tons and, as a result, may constitute a unique demand for launch services. What alternatives might be pursued to develop and procure the type of launch vehicles neces- sary for conducting manned lunar missions, and how much would those alternatives cost? This Congressional Budget Office (CBO) study—prepared at the request of the Ranking Member of the House Budget Committee—examines those questions. The analysis presents six alternative programs for developing launchers and estimates their costs under the assump- tion that manned lunar missions will commence in either 2018 or 2020. In keeping with CBO’s mandate to provide impartial analysis, the study makes no recommendations. -

2020 Marshall Star Year in Rev
Director’s Corner: Paying it Forward in 2021 As we enter the first few days of 2021, my mind is focused And I’m so excited for the on you: the Marshall team. For me, you are a bright star in work being done – TODAY a dark time. – on far-reaching technology like the Mars Ascent Vehicle You have made Marshall Space Flight Center’s 60th year, and trail-blazing projects like a year that seemed burdened by some of humanity’s Solar Cruiser. Our next great greatest challenges, into a series of incredible successes. science project –the Imaging You have done all we’ve asked to help keep one another X-Ray Polarimetry Explorer safe and healthy, and still execute our missions. It is your –will launch later this year, vigilance and dedication that allows me to brag about all expanding our view of the you have accomplished throughout this chaotic time. While universe in ways we could a majority of the workforce enters the new year under never imagine! mandatory telework status, we do so with the promise of a brighter future in what lies ahead. Expertise at Marshall supporting these initiatives Marshall Director Jody Singer. I know there are those who continue on-site work every is vast – scouting landing day as we – together – further our mission. That includes sites on Mars and assisting the agency with identifying protecting, managing, and maintaining our facilities and science priorities for Artemis III, for example. And Marshall maintaining continuous contact with astronauts to manage continues to lead the agency in processes that will pay science in low-Earth orbit aboard the International Space forward to humankind’s first journey to deep space, including Station. -
The 6555Th Table of Contents
The 6555th Table of Contents The 6555th Missile and Space Launches Through 1970 by Mark C. Cleary 45th Space Wing History Office Table of Contents Preface Chapter I - Foundations of the 6555th: The Post War Legacy Section 1 - Post-War legacy Through 1949 Section 2 - Activities at Holloman, Eglin and Patrick AFB, 1950-1951 Chapter II - MATADOR and the Era of Winged Missiles Section 1 - MATADOR Operations Through 1954 Section 2 - MATADOR and MACE Operations 1955-1963 Section 3 - LARK, BOMARC and SNARK Operations Section 4 - The NAVAHO Program The 6555th Table of Contents Chapter III - The 6555th's Role in the Development of Ballistic Missiles Section 1 - Ballistic Missile Test Organizations and Commanders Section 2 - The Eastern Test Range in the 1950's Section 3 - Ballistic Missile Test Objectives Section 4 - The THOR Ballistic Missile Program Section 5 - The ATLAS Ballistic Missile Program Section 6 - The TITAN Ballistic Missile Program Section 7 - Organization, Resources and Activities in the 1960's Section 8 - The MINUTEMAN Ballistic Missile Development Program Chapter IV - Taking the High Ground: The 6555th's Role in Space Through 1970 Section 1 - U. S. Military Space Efforts Through 1960 Section 2 - ATLAS, THOR and BLUE SCOUT Space Operations Section 3 - The TITAN II/GEMINI Program Section 4 - The TITAN III Program Section 5 - Organizational Changes 1965-1970 Preface (1st Edition, November 1991) When I assumed the duties of Chief, ESMC History Office in January 1986, I was completely unaware of the 6555th's contributions to America's missile and space efforts in the 1950s and 1960s. Like most Americans -- indeed, like most people the world over -- I assumed that the National Aeronautics and Space Administration dominated most aspects of the United States space effort after 1958. -

SLS June 2018 Fact Sheet
National Aeronautics and Space Administration Space Launch System America’s Rocket for Deep Space Exploration NASA’s Space Launch System, or SLS, is a super-heavy-lift launch vehicle that provides the foundation for human exploration beyond Earth’s orbit. With its unprecedented power and capabilities, SLS is the only rocket that can send Orion, astronauts, and cargo to the Moon on a single mission. Offering more payload mass, volume capabil- facts ity, and energy, SLS is designed to be flexible and evolvable and will open new possibilities for payloads, including robotic scientific missions to places like the Moon, Mars, Saturn, and Jupiter. The SLS team is producing NASA’s first deep space rocket built for human space travel since the Saturn V. Engineers are making progress toward delivering the first SLS rocket to NASA’s Kennedy Space Center in Florida for its first Artemis I on Mobile Launcher (artist concept) launch on the Artemis I lunar mission. The Power to Explore Beyond Block 1B crew vehicle, will use a new, more Earth’s Orbit powerful Exploration Upper Stage (EUS) to enable more ambitious missions. The Block 1B NASA To fulfill America’s future needs for deep space vehicle can, in a single launch, carry the Orion missions, SLS will evolve into increasingly crew vehicle along with large cargos for explo- more powerful configurations. SLS is designed ration systems needed to support a sustained for deep space missions and will send Orion presence on the Moon. or other cargo to the Moon, which is nearly The Block 1B crew vehicle can send 38 t 1,000 times farther than where the space sta- (83,700 lbs.) to deep space including Orion and tion resides in low-Earth orbit.