Concept of Operations (Conops) – Tampa (THEA)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Conference Program Book
2020 FMEA Professional Development Conference Guide 1 Hit all the high notes Booth #4001 Inspire them to new musical heights! See for Yourself Breezin’ Thru Theory makes learning to read and understand music faster Hands-on Workshop: and easier. And, it’s motivating, so your students quickly build mastery, Fri., Jan. 10 at 11:45 am as well as self-confi dence! Accessed seamlessly online – on any device, (Room TCC 18 & 19) anytime, anywhere – it’s fun and interactive. Kids love it… and so do teachers. With at-a-glance student tracking and automated assessments, it frees up valuable class and marking time, so you can do what you love most – getting kids excited about learning music. BreezinThruTheory.com 1-855-265-3805 [email protected] Grades 4-12 2 2020 FMEA Professional Development Conference Guide 2020 FMEA PROFESSIONAL DEVELOPMENT CONFERENCE Index of Advertisers & ALL-STATE CONCERTS Breezin’ Thru, Inc. ......................IFC Brightspark Travel .......................... 64 DePaul University School of Music ............................... 62 Florida Atlantic University ........................................ 10 Florida Gulf Coast University ........................................ 67 Florida State University ............... 32 Florida State University Summer Camps .............................. 24 LungTrainers, LLC ..................... IBC Manhattan Concert Contents Productions ...................................... 46 Mercer University President’s Message ................................. 5 Concerts ..............................................26-29 -

20-24 Buffalo Main Street: Smart Corridor Plan
Buffalo Main Street: Smart Corridor Plan Final Report | Report Number 20-24 | August 2020 NYSERDA Department of Transportation Buffalo Main Street: Smart Corridor Plan Final Report Prepared for: New York State Energy Research and Development Authority New York, NY Robyn Marquis Project Manager and New York State Department of Transportation Albany, NY Mark Grainer Joseph Buffamonte, Region 5 Project Managers Prepared by: Buffalo Niagara Medical Campus, Inc. & WSP USA Inc. Buffalo, New York NYSERDA Report 20-24 NYSERDA Contract 112009 August 2020 NYSDOT Project No. C-17-55 Notice This report was prepared by Buffalo Niagara Medical Campus, Inc. in coordination with WSP USA Inc., in the course of performing work contracted for and sponsored by the New York State Energy Research and Development Authority (hereafter “NYSERDA”). The opinions expressed in this report do not necessarily reflect those of NYSERDA or the State of New York, and reference to any specific product, service, process, or method does not constitute an implied or expressed recommendation or endorsement of it. Further, NYSERDA, the State of New York, and the contractor make no warranties or representations, expressed or implied, as to the fitness for particular purpose or merchantability of any product, apparatus, or service, or the usefulness, completeness, or accuracy of any processes, methods, or other information contained, described, disclosed, or referred to in this report. NYSERDA, the State of New York, and the contractor make no representation that the use of any product, apparatus, process, method, or other information will not infringe privately owned rights and will assume no liability for any loss, injury, or damage resulting from, or occurring in connection with, the use of information contained, described, disclosed, or referred to in this report. -

Iso/Iec/Ieee 29148:2011(E)
INTERNATIONAL ISO/IEC/ STANDARD IEEE 29148 First edition 2011-12-01 Systems and software engineering — Life cycle processes — Requirements engineering Ingénierie des systèmes et du logiciel — Processus du cycle de vie — Ingénierie des exigences Reference number ISO/IEC/IEEE 29148:2011(E) © ISO/IEC 2011 © IEEE 2011 ISO/IEC/IEEE 29148:2011(E) PDF disclaimer This PDF file may contain embedded typefaces. In accordance with Adobe's licensing policy, this file may be printed or viewed but shall not be edited unless the typefaces which are embedded are licensed to and installed on the computer performing the editing. In downloading this file, parties accept therein the responsibility of not infringing Adobe's licensing policy. The ISO Central Secretariat, the IEC Central Office and IEEE do not accept any liability in this area. Adobe is a trademark of Adobe Systems Incorporated. Details of the software products used to create this PDF file can be found in the General Info relative to the file; the PDF-creation parameters were optimized for printing. Every care has been taken to ensure that the file is suitable for use by ISO member bodies and IEEE members. In the unlikely event that a problem relating to it is found, please inform the ISO Central Secretariat or IEEE at the address given below. COPYRIGHT PROTECTED DOCUMENT © ISO/IEC 2011 © IEEE 2011 All rights reserved. Unless otherwise specified, no part of this publication may be reproduced or utilized in any form or by any means, electronic or mechanical, including photocopying and microfilm, without permission in writing from ISO, IEC or IEEE at the respective address below. -
Concept of Operations
MAASTO TPIMS Project CONCEPT OF OPERATIONS July 15, 2016 MAASTO TPIMS Project Concept of Operations Table of Contents Introduction....................................................................................................................................1 1.0 Purpose and Overview .......................................................................................................2 2.0 Scope .................................................................................................................................5 3.0 Referenced Documents......................................................................................................5 4.0 Background ........................................................................................................................8 4.1 National Truck Parking Issues ........................................................................................8 4.1.1 Safety Concerns ......................................................................................................8 4.1.2 Economic Concerns...............................................................................................10 4.2 National Research Programs........................................................................................11 4.3 Current Systems ...........................................................................................................12 5.0 User-Oriented Project Development.................................................................................12 5.1 TPIMS Partnership -

Exhibit 1 the Brine Leases
Exhibit 1 Brine Leases The Brine Leases (as defined in the Motion) are between Great Lakes Chemical Corporation and the counterparties listed below. There are no cure amounts due under any of the Brine Leases. AMANDA M MCCLEVE ARTHUR M SMITH BARBARA ANN BRASWELL 17801 S 157TH WAY P O BOX 2766 1558 BRASWELL CORNER ROAD GILBERT, AZ 85296 REDMOND, WA 98073 MAGNOLIA, AR 71753 BARBARA RICHMOND BEORA JONES BEVERLY SMITH 230 UNION 537 923 FRIENDSHIP ROAD 2919 FM 1875 EL DORADO, AR 71730 LISBON, LA 71048 BEASLEY, TX 77417-9770 CASANDRA HILL CLAUDIA ELIZABETH TAYLOR DEVERA CREER 906 WINTERGREEN RD CLAUDIA CHURCH TAYLOR, GDN 328 ARC AVENUE LANCASTER, TX 75134 1905 CALION ROAD STOCKTON, CA 95210 EL DORADO, AR 71730 DIANE MCCLELLAND DOLORES R CREER DORIS CREER 2111 SOUTH LEWIS AVENUE 328 ARC AVENUE 8042 APPLETON DRIVE NORTH CHICAGO, IL 60064-2544 STOCKTON, CA 95210 UNIVERSITY CITY, MO 63130 EDDIE B CREER JR ELIZABETH LEE MCCLEVE - JOBE EULALYN WILSON CLARK 503 SOUTH 9TH STREET 17801 S. 157TH WAY 832 NORTH 6TH AVENUE SALINA, KS 67401-4243 GILBERT, AZ 85296 LAUREL, MS 39440-0106 FOUNDATION MINERAL PART II LP HAZEL MARIE MATTHEWS JAMES CLAYTON EDWARDS 1845 WOODALL RODGERS FWY 5419 ROBIN RD. 130 BIRCHWOOD CIRCLE SUITE 1275 LITTLE ROCK, AR 72204 CABOT, AR 72023-2585 DALLAS, TX 75201 JAMIE CLARK ALPHIN TRUST JAMIE CLARK ALPHIN TRUST #3 JAMIEL D CREER FIRST UNITED TRUST CO. NA, TR FIRST UNITED TRUST CO. N.A.,TR 10116 WHISPERING PINE DR P. O. BOX 751 P. O. BOX 751 LITTLE ROCK, AR 72209 EL DORADO, AR 71731-0751 EL DORADO, AR 71731-0751 Brine Leases (continued) -

Research & Forecast Report Q3 2016
Research & Forecast Report TAMPA Accelerating success. Q3 2016 | Multifamily Source: AXIOMetrics. RCA, CoStar Market Survey Results and Forecasts Sequential Month Annual 4Q15 1Q16 2Q16 3Q16 Sep-16 2014 2015 2016F 2017F 2018F 2019F 2020F Effective Rent Per Unit $1,076 $1,085 $1,110 $1,126 $1,120 $991 $1,051 $1,111 $1,151 $1,181 $1,217 $1,262 Per Sq. Ft $1.13 $1.14 $1.17 $1.19 $1.19 $1.04 $1.11 $1.17 $1.21 $1.25 $1.28 $1.33 Effective Rent Growth - Annually 6.9% 6.6% 6.5% 5.6% 4.9% 3.3% 6.1% 5.7% 3.6% 2.6% 3.0% 3.7% Effective Rent Growth - Quarterly 0.9% 0.9% 2.3% 1.5% Occupancy Rate 95.6% 95.5% 95.5% 95.4% 95.2% 94.8% 95.5% 95.5% 95.0% 94.7% 95.0% 95.3% Occupancy Change - Annually 0.6% 0.4% 0.0% -0.3% -0.5% 0.6% 0.7% 0.0% -0.5% -0.3% 0.3% 0.3% Occupancy Change - Quarterly -0.1% -0.1% 0.1% -0.1% Economic Concessions Concession Value $-3.40 $-4.53 $-3.60 $-3.23 $-3.18 $-8.64 $-3.74 As a % of Asking Rent -0.3% -0.4% -0.3% -0.3% -0.3% -0.9% -0.4% Q3 SALES Date Property Name Address City Units Year Built Price in $ $/Units Sep-16 TGM Ibis Walk 871 Ibis Walk Pl N Saint 401 2014 68,000,000 169,576 Petersburg Sep-16 District on Clearwater 3021 State Rd 590 Clearwater 222 1991 / 1997 28,750,000 129,505 Sep-16 Riverside Palms 5008 Sierra Pl Tampa 351 1974 / 2013 19,000,000 54,131 Sep-16 Camden Lakes Phase I & 11401 Doctor M L K Jr St N Saint 688 1983 80,850,000 117,515 Phase II Petersburg Sep-16 Las Villas Apartments 1503 E 142nd Ave Tampa 50 1974 / 1993 2,700,000 54,000 Sep-16 Tampa Commons 5718 Las Ventanas Dr Tampa 42 2008 4,352,500 103,631 Sep-16 -

Tampa Parking Restrictions and Road Closures
Tampa Parking Restrictions and Road Closures Beginning Monday, August 27 at 12:30 a.m., Florida 618 Toll (Selmon Expressway) between Willow Avenue and 50th Street will be closed, and will remain closed until Friday, August 31 at approximately 5:00 a.m. The Selmon Reversible Elevated Lanes (REL) will remain OPEN during this time to enter downtown Tampa and will operate as normal. Street parking will be prohibited beginning at 6 p.m., Friday, August 24, until 5 a.m., Friday, August 31, in the following areas in downtown Tampa, as well at the streets identified below as road closures: . South of East Whiting Street between South Ashley Drive to South Jefferson Avenue to Old . Waters Street and between South Meridian Avenue to Bayshore Boulevard . Tampa Street from East Scott Street to East Whiting Street . North Jefferson Street from East Cass Street to East Whiting Street . Florida Avenue from East Scott Street to East Whiting Street . East Tyler Street from North Orange Avenue to MacInness Place . Cass Street from North Boulevard to Nebraska Avenue Additional parking restrictions may be announced. For additional information, please visit the City of Tampa’s website at http://tampagov.net/RNC for the most current information. Road closures will be implemented beginning at noon, Saturday, August 25 until 6 p.m., Friday, August 31. On-street parking is prohibited on the following closed roads: . South Ashley Drive: Southbound from Jackson Street to East Whiting Street . South Tampa Street: Southbound from south of East Whiting Street to East Brorein Street . South Franklin Street: North and southbound from south of East Whiting Street to Old Waters . -
Concept of Operations for C-ITS Core Functions
Research Report AP-R479-15 Concept of Operations for C-ITS Core Functions Concept of Operations for C-ITS Core Functions Prepared by Publisher Freek Faber and David Green Austroads Ltd. Level 9, 287 Elizabeth Street Sydney NSW 2000 Australia Project Manager Phone: +61 2 9264 7088 [email protected] Stuart Ballingall www.austroads.com.au Abstract About Austroads This document defines the core functions of the C-ITS platform Austroads’ purpose is to: including their objectives and capabilities. It identifies user needs • promote improved Australian and New Zealand transport and describes how the system will operate. outcomes • provide expert technical input to national policy The Concept of Operations is intended to be an input to future development on road and road transport issues decision making and system engineering documents, including • promote improved practice and capability by road system requirements and design documentation. agencies • promote consistency in road and road agency operations. Austroads membership comprises the six state and two territory road transport and traffic authorities, the Commonwealth Department of Infrastructure and Regional Development, the Australian Local Government Association, and NZ Transport Agency. Austroads is governed by a Board consisting of the chief executive officer (or an alternative senior executive officer) of each of its eleven member organisations: • Roads and Maritime Services New South Wales Keywords • Roads Corporation Victoria Cooperative ITS, C-ITS, Concept of Operations, ConOps, core • Department of Transport and Main Roads Queensland system, core functions. • Main Roads Western Australia ISBN 978-1-925294-13-2 • Department of Planning, Transport and Infrastructure South Australia Austroads Project No. -
Concept of Operations
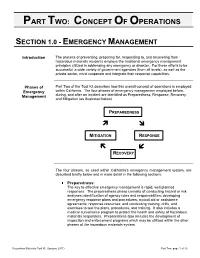
PART TWO: CONCEPT OF OPERATIONS SECTION 1.0 - EMERGENCY MANAGEMENT Introduction The process of preventing, preparing for, responding to, and recovering from hazardous materials incidents employs the traditional emergency management principles utilized in addressing any emergency or disaster. For these efforts to be successful, a wide variety of government agencies (from all levels), as well as the private sector, must cooperate and integrate their response capabilities. Phases of Part Two of the Tool Kit describes how this overall concept of operations is employed Emergency within California. The four phases of emergency management employed before, Management during, and after an incident are identified as Preparedness, Response, Recovery, and Mitigation (as illustrated below). PREPAREDNESS MITIGATION RESPONSE RECOVERY The four phases, as used within California's emergency management system, are described briefly below and in more detail in the following sections. Preparedness: The key to effective emergency management is rapid, well planned responses. The preparedness phase consists of conducting hazard or risk analyses; identification of agency roles and responsibilities; developing emergency response plans and procedures; mutual aid or assistance agreements; response resources; and conducting training, drills, and exercises to test the plans, procedures, and training. It also includes a medical surveillance program to protect the health and safety of hazardous materials responders. Preparedness also includes the development of -

AP 210 Domain Specific Entities (Subtypes of Generic Resource Entities) and Rules Are Added to Meet the Domain Requirements
NISTIR 7677 AP210 Edition 2 Concept of Operations Jamie Stori SFM Technology, Inc. Urbana, Illinois Kevin Brady National Institute of Standards and Technology Electronics and Electrical Engineering Laboratory Thomas Thurman Rockwell Collins, Cedar Rapids, Iowa 1 NISTIR 7677 AP210 Edition 2 Concept of Operations Jamie Stori SFM Technology, Inc. Urbana, Illinois Kevin Brady National Institute of Standards and Technology Electronics and Electrical Engineering Laboratory Thomas Thurman Rockwell Collins, Cedar Rapids, Iowa April 2010 U.S. Department of Commerce Gary Locke, Secretary National Institute of Standards and Technology Patrick D. Gallagher, Director 2 AP210 Edition 2 Concept of Operations This document provides information to support organizations wishing to develop data exchange and sharing implementations using AP 210. Contents 1. Background..................................................................................................................................... 5 2. Product types that are supported by AP 210 ..................................................................................... 6 3. Life cycle stages that are supported by AP 210 ................................................................................ 7 4. Disciplines that are supported by AP 210 ........................................................................................ 8 5. Product data types that are supported by AP 210 ............................................................................. 9 5.1 Information Rights Data ........................................................................................... -

Archaeological and Historic Preservation in Tampa, Florida Dawn Michelle Hayes University of South Florida, [email protected]
University of South Florida Scholar Commons Graduate Theses and Dissertations Graduate School January 2013 Archaeological and Historic Preservation in Tampa, Florida Dawn Michelle Hayes University of South Florida, [email protected] Follow this and additional works at: http://scholarcommons.usf.edu/etd Part of the History of Art, Architecture, and Archaeology Commons, and the Law Commons Scholar Commons Citation Hayes, Dawn Michelle, "Archaeological and Historic Preservation in Tampa, Florida" (2013). Graduate Theses and Dissertations. http://scholarcommons.usf.edu/etd/4901 This Dissertation is brought to you for free and open access by the Graduate School at Scholar Commons. It has been accepted for inclusion in Graduate Theses and Dissertations by an authorized administrator of Scholar Commons. For more information, please contact [email protected]. Archaeological and Historic Preservation in Tampa, Florida by Dawn Michelle Hayes A dissertation submitted in partial fulfillment of the requirements for the degree of Doctor of Philosophy Department of Anthropology College of Arts and Sciences University of South Florida Major Professor: Brent R. Weisman, Ph.D. Antoinette Jackson, Ph.D. Cheryl Rodriguez, Ph.D. Beverly Ward, Ph.D. E. Christian Wells, Ph.D. Date of Approval: November 18, 2013 Keywords: law, museums, neighborhood associations, government, community Copyright © 2013, Dawn Michelle Hayes Dedication To my grandparents: Grandma D.D., Grandpa Cos, Grandma Virginia, Granddad, Nonnie, Topper, and Ralph. Acknowledgments A tremendous thank-you to the members of the Central Gulf Coast Archaeological Society and the Old Seminole Heights Neighborhood Association‟s Preservation Committee, who allowed me to work with them and learn from them for the past several years, not only participating in the research, but keeping it and my writing on track. -

Hillsborough County Legal Notices
Public Notices PAGES 21-56 PAGE 21 NOVEMBERAUGUST 8 - NOVEMBER 1- AUGUST 25,14, 20162019 HILLSBOROUGH COUNTY LEGAL NOTICES FICTITIOUS NAME NOTICE NOTICE OF INTENDED AGENCY ACTION BY NOTICE NOTICE OF AVAILABILITY Notice is hereby given that ROBIER THE SOUTHWEST FLORIDA WATER MANAGEMENT DISTRICT Notice is hereby given that the Southwest Florida Water Management District (Dis- OF FOUNDATION ANNUAL PANEQUE, owner, desiring to engage Notice is given that the District has received the application for Environmental trict) issued on November 1, 2019, a Water Use Permit Modification at Sherwood RETURN in business under the fictitious name Resource Permit Modification to serve a residential subdivision project known as Manor, by applicant: SM-Ruskin Development, LLC, 111 South Armenia Avenue, The annual return of The Krauss/Bas- of CREATIVE TRAVEL MOVEMENT Tower Dairy - Phase 4. Suite 201, Tampa, Florida 33609. Application No. 20 010949.004. Application re- chab Foundation, Inc. for the taxable located at 5210 HEADLAND HILLS ceived: October 4, 2019. Predominant use type(s): Residential Lawn/Landscape. year ending October 31, 2019, is avail- AVE, TAMPA, FL 33625 intends to The project is located in Hillsborough County, Section(s) 35, Township 29 South, Quantity: The authorized allocated quantities have decreased and are as follows: able at its principal office, located at 401 register the said name in HILLSBOR- Range 19 East. 2,900 gallons per day (gpd) Annual Average Daily, 3,300 gpd Drought Annual Aver- E. Jackson Street, Suite 3100, Tampa, OUGH county with the Division of age, 8,700 gpd Peak Month, and Maximum Crop (Frost-Freeze) Protection quanti- Florida 33602, for inspection during Corporations, Florida Department of The permit applicant is Lennar Homes, LLC.