Development and Testing of the Orion CEV Parachute Assembly System (CPAS)
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Flight Opportunities and Small Spacecraft Technology Program Updates NAC Technology, Innovation and Engineering Committee Meeting | March 19, 2020
Flight Opportunities and Small Spacecraft Technology Program Updates NAC Technology, Innovation and Engineering Committee Meeting | March 19, 2020 Christopher Baker NASA Space Technology Mission Directorate Flight Opportunities and Small Spacecraft Technology Program Executive National Aeronautics and Space Administration 1 CHANGING THE PACE OF SPACE Through Small Spacecraft Technology and Flight Opportunities, Space Tech is pursuing the rapid identification, development, and testing of capabilities that exploit agile spacecraft platforms and responsive launch capabilities to increase the pace of space exploration, discovery, and the expansion of space commerce. National Aeronautics and Space Administration 2 THROUGH SUBORBITAL FLIGHT The Flight Opportunities program facilitates rapid demonstration of promising technologies for space exploration, discovery, and the expansion of space commerce through suborbital testing with industry flight providers LEARN MORE: WWW.NASA.GOV/TECHNOLOGY Photo Credit: Blue Origin National Aeronautics and Space Administration 3 FLIGHT OPPORTUNITIES BY THE NUMBERS Between 2011 and today… In 2019 alone… Supported 195 successful fights Supported 15 successful fights Enabled 676 tests of payloads Enabled 47 tests of payloads 254 technologies in the portfolio 86 technologies in the portfolio 13 active commercial providers 9 active commercial providers National Aeronautics and Space Administration Numbers current as of March 1, 2020 4 TECHNOLOGY TESTED IN SUBORBITAL Lunar Payloads ISS SPACE IS GOING TO EARTH ORBIT, THE MOON, MARS, AND BEYOND Mars 2020 Commercial Critical Space Lunar Payload Exploration Services Solutions National Aeronautics and Space Administration 5 SUBORBITAL INFUSION HIGHLIGHT Commercial Lunar Payload Services Four companies selected as Commercial Lunar Payload Services (CPLS) providers leveraged Flight Opportunities-supported suborbital flights to test technologies that are incorporated into their landers and/or are testing lunar landing technologies under Flight Opportunities for others. -
The Design and Development of an Electromechanical Drogue Parachute Line Release Mechanism for Level 3 High-Power Amateur Rockets
Portland State University PDXScholar University Honors Theses University Honors College 5-24-2019 The Design and Development of an Electromechanical Drogue Parachute Line Release Mechanism for Level 3 High-Power Amateur Rockets Marie House Portland State University Follow this and additional works at: https://pdxscholar.library.pdx.edu/honorstheses Let us know how access to this document benefits ou.y Recommended Citation House, Marie, "The Design and Development of an Electromechanical Drogue Parachute Line Release Mechanism for Level 3 High-Power Amateur Rockets" (2019). University Honors Theses. Paper 753. https://doi.org/10.15760/honors.770 This Thesis is brought to you for free and open access. It has been accepted for inclusion in University Honors Theses by an authorized administrator of PDXScholar. Please contact us if we can make this document more accessible: [email protected]. The design and development of an electromechanical drogue parachute line release mechanism for level 3 high-power amateur rockets by Marie House An undergraduate honors thesis submitted in partial fulfillment of the requirements for the degree of Bachelor of Science in University Honors and Mechanical Engineering Thesis Adviser Robert Paxton Portland State University 2019 Abstract This research has developed a viable drogue parachute release system sufficient for recovering level 3 amateur rockets. The system is based on the simple mechanics of combining two lever arms and a 2 to 1 pulley interaction to create a 200:1 force reduction between the weight applied to the system and the force required to release it. A linear actuator retracts a release cord, triggering the three rings that hold the system together to unfurl from one another and separate the drogue parachute from the payload. -
Status of the Space Shuttle Solid Rocket Booster
The Space Congress® Proceedings 1980 (17th) A New Era In Technology Apr 1st, 8:00 AM Status of The Space Shuttle Solid Rocket Booster William P. Horton Solid Rocket Booster Engineering Office, George C. Marshall Space Flight Center, Follow this and additional works at: https://commons.erau.edu/space-congress-proceedings Scholarly Commons Citation Horton, William P., "Status of The Space Shuttle Solid Rocket Booster" (1980). The Space Congress® Proceedings. 3. https://commons.erau.edu/space-congress-proceedings/proceedings-1980-17th/session-1/3 This Event is brought to you for free and open access by the Conferences at Scholarly Commons. It has been accepted for inclusion in The Space Congress® Proceedings by an authorized administrator of Scholarly Commons. For more information, please contact [email protected]. STATUS OF THE SPACE SHUTTLE SOLID ROCKET BOOSTER William P. Horton, Chief Engineer Solid Rocket Booster Engineering Office George C. Marshall Space Flight Center, AL 35812 ABSTRACT discuss retrieval and refurbishment plans for Booster reuse, and will address Booster status Two Solid Rocket Boosters provide the primary for multimission use. first stage thrust for the Space Shuttle. These Boosters, the largest and most powerful solid rocket vehicles to meet established man- BOOSTER CONFIGURATION rated design criteria, are unique in that they are also designed to be recovered, refurbished, It is appropriate to review the Booster config and reused. uration before describing the mission profile. The Booster is 150 feet long and is 148 inches The first SRB f s have been stacked on the in diameter (Figure 1), The inert weight Mobile Launch Platform at the Kennedy Space is 186,000 pounds and the propellant weight is Center and are ready to be mated with the approximately 1.1 million pounds for each External Tank and Orbiter in preparation for Booster. -

Affordable Flight Demonstration of the GTX Air-Breathing SSTO Vehicle Concept
NASA/TM—2003-212315 APS–III–22 Affordable Flight Demonstration of the GTX Air-Breathing SSTO Vehicle Concept Thomas M. Krivanek, Joseph M. Roche, and John P. Riehl Glenn Research Center, Cleveland, Ohio Daniel N. Kosareo ZIN Technologies, Inc., Cleveland, Ohio April 2003 The NASA STI Program Office . in Profile Since its founding, NASA has been dedicated to • CONFERENCE PUBLICATION. Collected the advancement of aeronautics and space papers from scientific and technical science. The NASA Scientific and Technical conferences, symposia, seminars, or other Information (STI) Program Office plays a key part meetings sponsored or cosponsored by in helping NASA maintain this important role. NASA. The NASA STI Program Office is operated by • SPECIAL PUBLICATION. Scientific, Langley Research Center, the Lead Center for technical, or historical information from NASA’s scientific and technical information. The NASA programs, projects, and missions, NASA STI Program Office provides access to the often concerned with subjects having NASA STI Database, the largest collection of substantial public interest. aeronautical and space science STI in the world. The Program Office is also NASA’s institutional • TECHNICAL TRANSLATION. English- mechanism for disseminating the results of its language translations of foreign scientific research and development activities. These results and technical material pertinent to NASA’s are published by NASA in the NASA STI Report mission. Series, which includes the following report types: Specialized services that complement the STI • TECHNICAL PUBLICATION. Reports of Program Office’s diverse offerings include completed research or a major significant creating custom thesauri, building customized phase of research that present the results of databases, organizing and publishing research NASA programs and include extensive data results . -
Design a Crew Module Drop Test Data Log Use This Data Log to Record the Results of Each Drop Test
National Aeronautics and DESIGN A Space Administration CREWYour Challenge MODULE Design and build a crew module model that will secure two astronaut figures during a drop test. Do First Watch the instructional video for this module: go.nasa.gov/34hVUvL Astronaut safety is of the highest Design Constraints importance. For Artemis missions, 1) The crew module must safely carry two astronauts. You must design and build a secure NASA’s Orion spacecraft must seat for the astronauts, without gluing or taping them in place. The astronauts should be able to support astronauts stay in their seats during each drop test. for weeks at a time and operate reliably in the harsh space 2) The crew module must fit into the container you chose. This item is simply for size environment. restraints. The crew module must not be dropped while inside the container. 3) The crew module must have one hatch that opens and closes easily. The hatch should remain shut during all drop tests. 4) Your crew module design should consider mass and strength. Mass is important in space travel. The heavier the crew module, the more expensive it is to build and, ultimately, to launch. NASA is looking for a lightweight but strong crew module. Ask and Imagine Think of ways to safely secure two astronauts inside of the crew module. Learn more: • What types of materials will protect the astronauts? Orion Capabilities for Deep Space • How can you reduce the impact on the crew module and astronauts? Enabled Crewed Artemis Moon • What essential elements are needed for crew safety? Missions go.nasa.gov/2GEMBN1 Top 5 Technologies needed for a LET’S GET STARTED! Spacecraft to Survive Deep Space 1. -
Parachute Rigger Handbook
Parachute Rigger Handbook August 2015 Change 1 (December 2015) U.S. Department of Transportation FEDERAL AVIATION ADMINISTRATION Flight Standards Service iv Record of Changes Change 1 (December 2015) This is an updated version of FAA-H-8083-17A, Parachute Rigger Handbook, dated August 2015. This version contains error corrections, revised graphics, and updated performance standards. All pages containing changes are marked with the change number and change date in the page footer. The original pagination has been maintained so that the revised pages may be replaced in lieu of repurchasing or reprinting the entire handbook. The changes made in this version are as follows: • Updated Table of Contents page numbers (page ix). • Replaced Figure 2-12 (page 2-8) with version from previous version of the handbook (FAA-H-8083-17, Figure 2-10). 3 1 • Revised the third sentence in the second paragraph in the left column of page 2-14: changed “ ⁄8"” to “ ⁄2".” • Revised the caption for Figure 3-17 (page 3-7): changed “Tape” to “Webbing.” • Revised the caption for Figure 3-18 (page 3-7): changed “Tape” to “Webbing.” • Revised the last sentence in the first paragraph in the right column of page 7-2: changed “FAA-licensed” to “FAA- certificated.” • Revised the third bullet under Square Canopy – Rib Repair in the right column of page 7-25: added “—mains and reserves; FAA Senior Parachute Rigger—mains.” • Revised Figure G at the bottom of page 7-82: removed “+2"” after “X = Required length.” • Revised Appendix A Table of Contents (page A-1): revised titles of new documents and updated page numbers. -

O'keefe Resigns
Volume 46 Issue 11 Dryden Flight Research Center, Edwards, California December 31, 2004 O’Keefe resigns NASA News Services FondFondFond NASAAdministrator Sean O’Keefe, who in the past three years led the Agency through an aggressive and comprehensive management transformation and helped it through one of its most painful tragedies, has resigned his post. In his resignation letter to President Bush, O’Keefe wrote, “I will continue until you have named a successor and in the hope the Senate will act on your nomination by February.” FarewellFarewellFarewell “I’ve been honored to serve this ■ Storied research aircraft president, the American people and my retired after more than talented colleagues here at NASA,” four decades in the skies O’Keefe said. “Together, we’ve enjoyed unprecedented success and By Jay Levine seen each other through arduous X-Press Editor circumstances. This was the most Dryden’s venerable NB-52B aircraft difficult decision I’ve ever made, but was recognized Dec. 17 for a career it’s one I felt was best for my family spanning nearly fifty years, a tour of duty and our future.” in which the big bird played a role in O’Keefe, 48, is NASA’s 10th airlaunching generations of experimental administrator. Nominated by President aircraft. Bush and confirmed by the U.S. The retirement ceremony brought Senate, he was sworn into office Dec. together people from the aircraft’s past 21, 2001. It was O’Keefe’s fourth and present as it is prepared for its future presidential appointment. as a historical monument at the Edwards Air After joining NASA, O’Keefe Force Base north gate. -

Preparation of Papers for AIAA Technical Conferences
Maraia Capsule Flight Testing and Results for Entry, Descent, and Landing Ronald R. Sostaric1 and Alan L. Strahan2 NASA Johnson Space Center, Houston, TX, 77058 The Maraia concept is a modest size (150 lb., 30” diameter) capsule that has been proposed as an ISS based, mostly autonomous earth return capability to function either as an Entry, Descent, and Landing (EDL) technology test platform or as a small on-demand sample return vehicle. A flight test program has been completed including high altitude balloon testing of the proposed capsule shape, with the purpose of investigating aerodynamics and stability during the latter portion of the entry flight regime, along with demonstrating a potential recovery system. This paper includes description, objectives, and results from the test program. Nomenclature = Aerodynamic angle of attack = Sideslip angle CA = Axial aerodynamic force coefficient Cm = Aerodynamic moment coefficient Cm,q = Change in moment coefficient due to pitch rate CN = Normal aerodynamic force coefficient I. Introduction HE Maraia Capsule is envisioned as an entry technology testbed that could be adapted to return small payloads T (10-100’s of kg) from the International Space Station (ISS) or from beyond Low-Earth Orbit (LEO) destinations. Figure 1 shows the concept of operations. The Maraia Capsule is delivered to the International Space Station (ISS) via a visiting vehicle, such as the SpaceX Dragon or the Orbital Cygnus. It resides in the internal volume (IVA) of the spacecraft and is designed to ISS internal requirements. At the desired time, the Maraia Capsule is attached to the Space Station Integrated Kinetic Launcher for Orbital Payload Systems (SSIKLOPS)1 device. -

Nasa's Commercial Crew Development
NASA’S COMMERCIAL CREW DEVELOPMENT PROGRAM: ACCOMPLISHMENTS AND CHALLENGES HEARING BEFORE THE COMMITTEE ON SCIENCE, SPACE, AND TECHNOLOGY HOUSE OF REPRESENTATIVES ONE HUNDRED TWELFTH CONGRESS FIRST SESSION WEDNESDAY, OCTOBER 26, 2011 Serial No. 112–46 Printed for the use of the Committee on Science, Space, and Technology ( Available via the World Wide Web: http://science.house.gov U.S. GOVERNMENT PRINTING OFFICE 70–800PDF WASHINGTON : 2011 For sale by the Superintendent of Documents, U.S. Government Printing Office Internet: bookstore.gpo.gov Phone: toll free (866) 512–1800; DC area (202) 512–1800 Fax: (202) 512–2104 Mail: Stop IDCC, Washington, DC 20402–0001 COMMITTEE ON SCIENCE, SPACE, AND TECHNOLOGY HON. RALPH M. HALL, Texas, Chair F. JAMES SENSENBRENNER, JR., EDDIE BERNICE JOHNSON, Texas Wisconsin JERRY F. COSTELLO, Illinois LAMAR S. SMITH, Texas LYNN C. WOOLSEY, California DANA ROHRABACHER, California ZOE LOFGREN, California ROSCOE G. BARTLETT, Maryland BRAD MILLER, North Carolina FRANK D. LUCAS, Oklahoma DANIEL LIPINSKI, Illinois JUDY BIGGERT, Illinois GABRIELLE GIFFORDS, Arizona W. TODD AKIN, Missouri DONNA F. EDWARDS, Maryland RANDY NEUGEBAUER, Texas MARCIA L. FUDGE, Ohio MICHAEL T. MCCAUL, Texas BEN R. LUJA´ N, New Mexico PAUL C. BROUN, Georgia PAUL D. TONKO, New York SANDY ADAMS, Florida JERRY MCNERNEY, California BENJAMIN QUAYLE, Arizona JOHN P. SARBANES, Maryland CHARLES J. ‘‘CHUCK’’ FLEISCHMANN, TERRI A. SEWELL, Alabama Tennessee FREDERICA S. WILSON, Florida E. SCOTT RIGELL, Virginia HANSEN CLARKE, Michigan STEVEN M. PALAZZO, Mississippi VACANCY MO BROOKS, Alabama ANDY HARRIS, Maryland RANDY HULTGREN, Illinois CHIP CRAVAACK, Minnesota LARRY BUCSHON, Indiana DAN BENISHEK, Michigan VACANCY (II) C O N T E N T S Wednesday, October 26, 2011 Page Witness List ............................................................................................................ -

Low Velocity Airdrop Tests of an X-38 Backup Parachute Design
Source of Acquisition NASA Johnson Space Center Low Velocity Airdrop Tests of an X-38 Backup Parachute Design Jenny M. stein* and Ricardo A. ~achin~ NASA Johnson Space Center, Houston, Texas, 77059 Dean F. wolft. Albz~querque,New Mexico, 871 11 and F. David ~illebrandt~ United Space Alliance, Kennedy Space Center, Florida, 32815 The NASA Johnson Space Center's X-38 program designed a new backup parachute system to recover the 25,000 lb X-38 prototype for the Crew Return Vehicle spacecraft. Due to weight and cost constraints, the main backup parachute design incorporated rapid and low cost fabrication techniques using off-the-shelf materials. Near the vent, the canopy was constructed of continuous ribbons, to provide more damage tolerance. The remainder of the canopy was a constructed with a continuous ringslot design. After cancellation of the X-38 program, the parachute design was resized, built, and drop tested for Natick Soldiers Center's Low Velocity Air Drop (LVAD) program to deliver cargo loads up to 22,000 Ibs from altitudes as low as 500 feet above the ground. Drop tests results showed that the 500- foot LVAD parachute deployment conditions cause severe skirt inversion and inflation problems for large parachutes. The bag strip occurred at a high angle of attack, causing skirt inversion before the parachute could inflate. The addition of a short reefing line prevented the skirt inversion. Using a lower porosity in the vent area, than is normally used in large parachutes, improved inflation. The drop testing demonstrated that the parachute design could be refined to meet the requirements for the 500-foot LVAD mission. -
Launch Abort System Crew Module Service Module
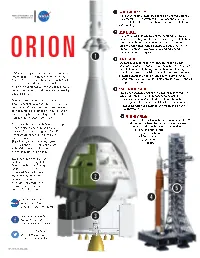
LAUNCH ABORT SYSTEM National Aeronautics and The launch abort system, positioned on a tower atop the Space Administration crew module, can activate within milliseconds to propel the vehicle to safety and position the crew module for a safe landing. CREW MODULE The crew module is capable of transporting four to six crew members beyond the moon, providing a safe habitat from launch through landing and recovery. Inside the familiar deep-space capsule shape are advances in life support, avionics, power systems, and advanced manufacturing techniques. SERVICE MODULE Created in collaboration with ESA (European Space Agency), the service module provides support to the crew module from launch through separation prior to entry. It NASA’s Orion spacecraft will carry astronauts provides in-space propulsion capability for orbital transfer, farther than humans have ever gone before. attitude control and high altitude ascent aborts. While It will serve as the exploration vehicle that will mated with the crew module, it also provides water and air carry the crew to deep space, provide to support the crew. emergency abort capability, sustain astronauts during their missions and provide safe re-entry SPACE LAUNCH SYSTEM back to Earth. The Space Launch System is a powerful launch vehicle, which will expand human presence to celestial destinations beyond low-Earth orbit and throughout the Orion features technology advancements and solar system. This launch vehicle will be capable of innovations that have been incorporated into launching Orion to asteroids, the moon and on the the spacecraft's design. It includes crew and journey to Mars. service modules, a spacecraft adapter and a revolutionary launch abort system that will significantly increase crew safety. -
The Flexural Response of Bolted Composite Panels at Elevated Temperature" (2001)
The University of Maine DigitalCommons@UMaine Electronic Theses and Dissertations Fogler Library 2001 The lexF ural Response of Bolted Composite Panels at Elevated Temperature Christopher Gary Malm Follow this and additional works at: http://digitalcommons.library.umaine.edu/etd Part of the Mechanical Engineering Commons Recommended Citation Malm, Christopher Gary, "The Flexural Response of Bolted Composite Panels at Elevated Temperature" (2001). Electronic Theses and Dissertations. 311. http://digitalcommons.library.umaine.edu/etd/311 This Open-Access Thesis is brought to you for free and open access by DigitalCommons@UMaine. It has been accepted for inclusion in Electronic Theses and Dissertations by an authorized administrator of DigitalCommons@UMaine. THE FLEXURAL RESPONSE OF BOLTED COMPOSITE PANELS AT ELEVATED TEMPERATURE BY Christopher Gary Malm B. S. University of Maine, 1999 A THESIS Submitted in Partial Fulfillment of the Requirements for the Degree of Master of Science (in Mechanical Engineering) The Graduate School The University of Maine May 2001 Advisory Committee: Vince Caccese, Associate Professor of Mechanical Engineering, Advisor Donald Grant, Professor of Mechanical Engineering Christine Valle, Assistant Professor of Mechanical Engineering Roberto Lopez-Anido, Assistant Professor of Civil Engineering THE FLEXURAL RESPONSE OF BOLTED COMPOSITE PANELS AT ELEVATED TEMPERATURE By Christopher Gary Malm Thesis Advisor: Dr. Vincent Caccese An Abstract of the Thesis Presented in Partial Fulfillment of the Requirements for the Degree of Master of Science (in Mechanical Engineering) May, 2001 Carbon fiberlcyanate ester matrix composite panels with bolted connections to aluminum endplates were tested in four point bending at room and elevated temperatures. The specimens tested were subcomponents of the NASA X-38 Crew Return Vehicle.