Bayesian Networks: an Introduction (Wiley Series in Probability And
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

New Zealand Gazette
~umb. 87 1861 THE NEW ZEALAND GAZETTE WELLINGTON, THURSDAY, DECEMBER 12, 1946 Additional Land taken for a Technical School in the City of Christchurch SCHEDULE ApPROXIMATE area of the piece of land taken: 1 rood 23 perches. [L.S.] B. C. FREYBERG, Governor-General Being Lot 66, D.P. 297, being part Hapopo Block, and being the whole of the land comprised and described in Certificate of ritle, A PROCLAMATION Volume, 54, folio 202 (Wellington Land Registry). URSUANT to the Public Works Act, 1928, I, Lieutenant Given under the hand of His Excellency the Gover~or-General P General Sir Bernard Cyril Freyberg, the Governor-General of the Dominion of New Zealand, and issued under the of the Dominion of New Zealand, do hereby proclaim and declare Seal of that Dominion, this 4th day of December, 1946. that the additional land described in the Schedule hereto is hereby taken for a technical school; and I do also declare that this Pro R SEMPLE, Minister of Vvorks. clamation shall take effect on and after the sixteenth day of GOD SAVE THE KING! December, one thousand nine hundred and forty-six. (P.W.26/1127.) SCHEDULE ApPROXIMATE area of the piece of additional land taken: 1 rood Land taken for the Purposes of River Diversion and River Works in Blocks V and IX, Haurangi Survey District, Featherston 17·6 perches. County Being part Town Reserve 125, City of Christchurch (formerly part Fife Street, now stopped). [L.S.] Situated in the City of Christchurch (Canterbury RD.). B. C. FREYBERG, Governor-General In the Canterbury Land District; as the same is more parti A PROCLAMATION cularly delineated on the plan marked P.W.D. -

Redeeming the Truth
UNIVERSITY OF CALIFORNIA Los Angeles Redeeming the Truth: Robert Morden and the Marketing of Authority in Early World Atlases A dissertation submitted in partial satisfaction of the requirements for the degree Doctor of Philosophy in History by Laura Suzanne York 2013 © Copyright by Laura Suzanne York 2013 ABSTRACT OF THE DISSERTATION Redeeming the Truth: Robert Morden and the Marketing of Authority in Early World Atlases by Laura Suzanne York Doctor of Philosophy in History University of California, Los Angeles, 2013 Professor Muriel C. McClendon, Chair By its very nature as a “book of the world”—a product simultaneously artistic and intellectual—the world atlas of the seventeenth century promoted a totalizing global view designed to inform, educate, and delight readers by describing the entire world through science and imagination, mathematics and wonder. Yet early modern atlas makers faced two important challenges to commercial success. First, there were many similar products available from competitors at home and abroad. Secondly, they faced consumer skepticism about the authority of any work claiming to describe the entire world, in the period before standards of publishing credibility were established, and before the transition from trust in premodern geographic authorities to trust in modern authorities was complete. ii This study argues that commercial world atlas compilers of London and Paris strove to meet these challenges through marketing strategies of authorial self-presentation designed to promote their authority to create a trustworthy world atlas. It identifies and examines several key personas that, deployed through atlas texts and portraits, together formed a self-presentation asserting the atlas producer’s cultural authority. -

PDF Download Theater of Exhibitions Pdf Free Download
THEATER OF EXHIBITIONS Author: Jens Hoffmann Number of Pages: 88 pages Published Date: 22 Jul 2020 Publisher: Sternberg Press Publication Country: New York, United States Language: English ISBN: 9783956790874 DOWNLOAD: THEATER OF EXHIBITIONS Theater of Exhibitions PDF Book ' - Community Living Exploring Experiences of Advocacy by People with Learning Disabilities charts the course through which people with learning disabilities have become increasingly able to direct their own lives as fully active members of their communities. Create spreadsheets based on Apple's professionally designed templates or your own custom templates. The teacher who advocates personal beliefs. In the midst of the movement to save the earth, The Green Zone presents a sobering revelation: until we address the attack that the US military is waging on the global environment, the things we do at home won't change a thing. Providing complete coverage of changes to tax legislation for tax year 2013-2014, as well as proposed changes that haven't made it into law yet, this book has you covered from every angle. So learn to do it right. In this state, Leonard finds that nothing is what it seems, and no one can easily be trusted. Generations have grown up knowing that equation changed the shape of our world, but without understanding what it really means and why it is so significant. It is intended to serve a diverse audience including those involved in collecting (representative) data using mobile phones, and those using data collected through this approach. Make it a part of your professional collection today. Success in this case is not defined by money but overall happiness. -

Bibliographical Index
Bibliographical Index BIBLIOGRAPHICAL ACCESS TO THIS VOLUME Bacon, Roger. Opus Majus. 305, 322, 345 Basil, Saint. Homilies. 328 Three modes of access to bibliographical information are used Bede, the Venerable. De natura rerum. 137 in this volume: the footnotes; the bibliographies; and the Bib ---. De temporum ratione. 321 liographical Index. The footnotes provide the full form of a reference the first Cassiodorus. Institutiones divinarum et saecularium time it is cited in each chapter with short-title versions in litterarum. 172, 255, 259, 261 subsequent citations. In each of the short-title references, the Cato the Elder. Origines. 205 note number of the fully cited work is given in parentheses. Censorinus. De die natalie 255 The bibliographies following each chapter provide a selec Chaucer, Geoffrey. Prologue to the Canterbury Tales. 387 tive list of major books and articles relevant to its subject Cicero. Arataea (translation of Aratus's versification of matter. Eudoxus's Phaenomena). 143 The Bibliographical Index comprises a complete list, ar ---. Letters to Atticus. 255 ranged alphabetically by author's name, of all works cited in ---. De natura deorum. 160,168 the footnotes. Numbers in bold type indicate the pages on --. The Republic. 159, 160, 255 which references to these works can be found. This index is ---. Tusculan Disputations. 160 divided into two parts. The first part identifies the texts of Cleomedes. De motu circulari. 152, 154, 169 classical and medieval authors. The second part lists the mod Cosmas Indicopleustes. Christian Topography. 143, 144, ern literature. 261 Ctesias of Cnidus. Indica. 149 TEXTS OF CLASSICAL AND MEDIEVAL ---. Persica. 149 AUTHORS Dicuil. -
& Circulating Libraries
Parasols & Gloves & Broches & Circulating Libraries MARY MARGARET BENSON Northup Lrbrary, Linfield College, McMinnville, OR 97128 "Charlotte was to go . & to buy new Parasols, new Gloves, & new Broches, for her sisters & herself at the Library, which Mr. P. was anxiously wishing to support" (Sanditon 374). What kind of library was this circulating library at Sanditon? It is certainly not like any library familiar to most contemporary readers. Not only could one purchase "so many pretty Temptations" (S 390), but Mrs. Whitby, the "librarian," seems as likely to refer one to sources for Chamber- Horses as to a copy of Camilla. Before the eighteenth century, libraries in England were strictly for those who were associated with universities or other learned societies, or for those wealthy enough to collect and house their own books. While we don't see the former sort of library in the works of Jane Austen, we certainly see the latter. The library at Pemberley is surely magnificent-even though we have Miss Bingley's word for it. As Mr. Darcy says, "'It ought to be good . it has been the work of many generations"' (P&P 38). One can imagine that Mr. Knightley, too, would have an excellent library, though perhaps his collection would be of less antiquity. However, for those who could not afford a "gentleman's" library or even for those gentlefolk who were in town or at a spa for a short time, the circulating library filled the gap. Circulating libraries were part of the popular culture of the day, and references to them are found throughout Jane Austen. -

197 Noble: the Welsh Books Council
The Welsh Books Council John Noble High on a cliff overlooking Aberystwyth is Castell Brychan – printing; others are part-time ‘parlour’ publishers. This does the tartan, or plaid castle. Whatever lies behind the name, not suggest any lack of seriousness; rather, the opposite is Castell Brychan has the look of a fortress, and yet it was built true. As one publisher, Robat Gruffudd, of Y Lolfa, has initially as a private house for a head of the university’s said: ‘No Welsh publisher is in it for the money’. Academic music department. After that it was for many years a semi- publishing in English in Wales is predominantly from the nary for Roman Catholic priests until, in the 1980s, it University of Wales Press and from specialized and quasi- became the headquarters of the Welsh Books Council. government organizations. (At the present moment I am The primary aim and purpose of the Welsh Books indexing a soon-to–be-published title for the Royal Council (WBC) is to support and encourage the publishing Commission for Ancient and Historical Monuments in of books in the Welsh language. As part of this remit it Wales.) Publications in both Welsh and English cover the is concerned with the promotion and distribution of full range of subjects and types. In the year 2000, 682 titles books within Wales and provides marketing, design and were published in the Welsh language, including 76 reprints editorial assistance for publishers, covering books for adults and new editions. In the same year, 592 English-language as well as for children and teenagers. -

Journal of the Conductots' Guild
Volume 13 Number 1 \Winter/Spring 1992 Journal of the Conductots' Guild Table of Contents COMMENTARY PERFORMING ARTS AND THE NATION: A CHALLENGE FOR TODAY 2 by Joseph\7. Polisi THE IMPACT OF HAYDN'S CONDUCTED PERFORMANCES OF T-HECREANON ON THE \TORK AND THE HISTORY OF CONDUCTING 7 by Pau[ H. Kirby CONDUCTORS, ORCHESTRAS AND SOCIETY: A CONTEMPORARY VIE\T 22 by Kurt Masur STRAVINSKY, TEMPO AND LE SACRE 32 by Erica Heisler Buxbaum AN ANNOTATED BIBLIOGRAPHY OF SELECTED \NND ENSEMBLE/BAND REPERTOIRE TEXTS 40 by Harlan D. Parker SCORES AND PARTS 45 Dimitri Shostakovich,Symphony No. 6 in B Minor, Op. 53 by Glenn Block ARTS MEDICINE CENTERS RESOURCE LIST 54 BOOKS IN REVIE\UT 57 Max Rudolf, TheGrammar of Conducting,3rd edition by Samuel Jones Richard Koshgarian, Arnerican OrcbestralMusic: A PerformanceCaulog by David Daniels Julie Yarbrough, Modem LanguagesforMusicians by Raymond Friday Victor Rangel-Ribeiro and Robert Markel, ChamberMusic: An Intemational Guid,eto V(orksand their Instumenution by John Jay Hilfiger Humphrey Carpenter, Benjamin Britten: A Biography by Judy Ann Voois LETTERS TO THE EDITOR CONDUCTORS' GUILD, INC. tournal of tbe Conductors' Guild Editor .............JacquesVoois 103 South High Street,Room 6 'West Chester, PA 19382 AssociateEditor David Daniels Tel & Fax: 215/430-6010 Band/\Ufind Ensemble Editor .......Harlan D. Parker Officers Editor-at-large .Jonathan Sternberg President .........LarryNewland Vice-Presidents"...... .........AdrianGnam Assistant Editors David Daniels BarbaraSchubert Stephen Heyde John Jay Hilfiger Secretary .........CharlesBontrager Louis Menchaca Jon Mitchell Treasurer .........Joe1Ethan Fried John Noble Moye John Strickler PastPresident........ .........MichaelCharry Contributing Authors Board of Directors Glenn Block Erica Heisler Buxbaum Henry Bloch Glenn Block David Daniels Raymond Friday Canarina Catherine Comet John John Jay Hilfiger Samuel Jones Margery Deutsch Robert Emile Paul H. -
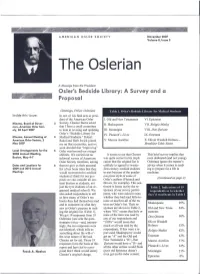
Osler's Bedside Library: a Survey and a Proposal
AMERICAN OSlER SOCIETY November 2007 Volume 8, Issue 3 The Oslerian A Message from the President Osler's Bedside Library: A Survey and a Proposal Greetings, Fellow Oslerisns Table 1. Osler's Bedside Library for Medical Students Inside this issue: In one of his final acts as presi- dent of the American Osler I. Old and New Testaments VI. Epictetus Society, Chester Bums asked Minutes, Board of Gover- 3 II. Shakespeare VII. ReJigio Medici nors, American Osler Soci- that I form a small committee ety, 30 April 2007 to look at revising and updating Ill. Montaigne VIII. Don Quixote Osler's "Bedside Library for IV. Plutarch's Lives IX. Emerson Minutes, Annual Meeting of 4 Medical Students." Robert American Osler Society, 2 Rakel and Herb Swick joined V. Marcus Aurelius X. Oliver Wendell Holmes- May 2007 me on that committee, and we Breakfast- Table Series soon decided that "improving" Local Arrangements for the 6 Osler was beyond our meager 2008 Annual Meeting, abilities. We carried out an It seems to me that Chester This brief survey implies that Boston, May 4-7 informal survey of American was quite correct in his impli- even dedicated (and not young) Osler Society members, asking cation that the original list is Oslerians ignore the master's Dates and Locations for 6 them to give us their personal unlikely to appeal to twenty- advice when it comes to read- 2009 and 2010 Annual list of ten book titles that they first-century medical students ing to prepare for a life in Meetings would recommend to medical in part because of the ponder- medicine. -

Travel Cat.Pages
Albums, Manuscripts, & Books About Travel offered by Sanctuary Books July 2015 [email protected] www.sanctuaryrarebooks.com 212-861-1055 { item no. 6 } { 1 - Afrique et Amerique } D'Avity, Pierre. Generale de L’Afrique Seconde Partie du Monde. [Bound with his:] Description Generale de L’Amerique, Troisieme Partie du Monde. Paris: chez Laurent Cottereau, 1643. Parts I and II (of 4) in one volume, complete for each part of the world; folio (345 x 220mm). Two engraved folding maps of Africa and the Western Hemisphere by Petrus Bertius, both dated 1640 (second state). Title pages separately printed in red and black with engraved allegorical vignette in each, decorative woodcut initials, chapter head and tail-pieces throughout. Near contemporary mottled calf, spine gilt in compartments, gilt-stamped morocco title label on spine, red sprinkled edges; (occasional small dampstains, lightly browned throughout, maps with come creases, trimmed; lightly rubbed with some small gouges). Te Generale was frst published in 1619 under the title Les Etats, Empires et Principautez du Monde, this edition is probably edited by Jean Baptist Rocoles (whose name appears in the 1660 edition). Te Bertius maps were frst published in 1624 and this copy maintains the second state (dated 1640) unique to this edition. Te same title was printed by Claude Sonnius and Denys Bechet in Paris that same year 1643, although having the third state maps (dated 1646). Pierre D’Avity was an avid explorer and undertook many historical and geographical tours which lead to several publications on worldly descriptions. Tis 17th-century two-part compilation is notable for keeping some of the earliest mentions of the rediscovery of the island Martinique in 1637. -

The Colonial Book and the Writing of American History, 1790-1855
HISTORY’S IMPRINT: THE COLONIAL BOOK AND THE WRITING OF AMERICAN HISTORY, 1790-1855 DISSERTATION Presented in Partial Fulfillment of the Requirements for the Degree Doctor of Philosophy in the Graduate School of The Ohio State University By Lindsay E.M. DiCuirci, M.A. Graduate Program in English The Ohio State University 2010 Dissertation Committee: Elizabeth Hewitt, Adviser Jared Gardner Susan Williams Copyright by Lindsay Erin Marks DiCuirci 2010 ABSTRACT “History’s Imprint: The Colonial Book and the Writing of American History, 1790-1855” investigates the role that reprinted colonial texts played in the development of historical consciousness in nineteenth-century America. In the early decades of the nineteenth century, antiquarians and historians began to make a concerted effort to amass and preserve an American archive of manuscript and print material, in addition to other artifacts and “curiosities” from the colonial period. Publishers and editors also began to prepare new editions of colonial texts for publication, introducing nineteenth-century readers to these historical artifacts for the first time. My dissertation considers the role of antiquarian collecting and historical publishing—the reprinting of colonial texts—in the production of popular historical narratives. I study the competing narratives of America’s colonial origins that emerged between 1790 and 1855 as a result of this new commitment to historicism and antiquarianism. I argue that the acts of selecting, editing, and reprinting were ideologically charged as these colonial texts were introduced to new audiences. Instead of functioning as pure reproductions of colonial books, these texts were used to advocate specific religious, political, and cultural positions in the nineteenth century. -

Lloyd Noble His Daughter, Anne Noble Brown, Speaks of His Generosity and Love for Oklahoma and Its People
Lloyd Noble His daughter, Anne Noble Brown, speaks of his generosity and love for Oklahoma and its people. Chapter 1 – 1:18 Introduction Announcer: Lloyd Noble was only 53 years old when he died, but in that short life span he accomplished so much. He left behind the Samuel Roberts Noble Foundation to carry out his mission. Lloyd Noble attended but never graduated from Oklahoma University, yet he served 15 years on OU’s Board of Regents. He felt a strong football program would be a good public relations tool for the school and he was instrumental in the hiring of coach Bud Wilkinson. The Lloyd Noble Center in Norman is well known for basketball and other popular events. Lloyd Noble’s first love was land, its management and preservation. He offered assistance to farmers and ranchers through The Noble Foundation. As part of this interview, you will hear Mr. Noble talk about his respect for the rural people of Oklahoma. You will also hear the former Speaker of the U.S. House of Representatives, Oklahoman Carl Albert, speak about the work of The Noble Foundation. Listen now to the daughter of Lloyd Noble, Ann Noble Brown as she shares her memories of her father. His influence on our state is enormous. VoicesofOklahoma. com is happy to share the story of Lloyd Noble thanks to the generous support of our sponsors, preserving Oklahoma’s legacy one voice at a time. Chapter 2 – 4:43 Nobles Come to Oklahoma John Erling: My name is John Erling and today’s date is August 29th, 2011. -

REFLECTIONS on SERVANT-LEADERSHIP and the UNITED KINGDOM Interview with John Noble and Ralph Lewis — LARRY C
REFLECTIONS ON SERVANT-LEADERSHIP AND THE UNITED KINGDOM Interview with John Noble and Ralph Lewis — LARRY C. SPEARS [John Noble and Ralph Lewis co-founded the Greenleaf Centre- United Kingdom in 1997. Both Ralph and John have a passion for developing servant-leaders and a strong belief in its potential for benefiting organizational life. For most of those years, John Noble served as director and Ralph Lewis served as board chair of Greenleaf-U.K. In November 2019, I sat down with them and conducted the following interview to capture their thoughts on servant-leadership, and their role in encouraging others in the U.K. and beyond, over the past 25 years. —Larry Spears] Larry: What were the markers in your life, the people or events that helped shape your thinking? Can you name a few? Ralph: There are an awful lot of them. I think the main thing was growing up in Uganda. I was the son of an English father. My mother was a Polish refugee and was treated rudely by the English colonialists even though she could speak five languages and was incredibly intelligent. That gave me a very strong feeling of being on the side of the underdog and also resentment against those who treated other people badly-- for whatever reason. And then when I 41 The International Journal of Servant-Leadership, 2020, vol, 14, issue 1, 41-80 came to England which I did when I was 12; it was a whole new world. I think I mostly was surprised by the lack of community in England.