Part IB Advanced Physics Dynamics David J C Mackay
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
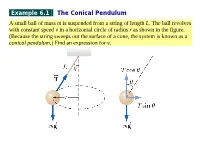
Example 6.1 the Conical Pendulum a Small Ball of Mass M Is Suspended from a String of Length L
Example 6.1 The Conical Pendulum A small ball of mass m is suspended from a string of length L. The ball revolves with constant speed v in a horizontal circle of radius r as shown in the figure. (Because the string sweeps out the surface of a cone, the system is known as a conical pendulum.) Find an expression for v. Example 6.2 How Fast Can It Spin? A puck of mass 0.500 kg is attached to the end of a cord 1.50 m long. The puck moves in a horizontal circle as shown in the figure. If the cord can withstand a maximum tension of 50.0 N, what is the maximum speed at which the puck can move before the cord breaks? Example 6.3 What Is the Maximum Speed of the Car? A 1500-kg car moving on a flat, horizontal road negotiates a curve as shown in the figure. If the radius of the curve is 35.0 m and the coefficient of static friction between the tires and dry pavement is 0.523, find the maximum speed the car can have and still make the turn successfully. Example 6.4 The Banked Roadway A civil engineer wishes to redesign the curved roadway in Example 6.3 in such a way that a car will not have to rely on friction to round the curve without skidding. In other words, a car moving at the designated speed can negotiate the curve even when the road is covered with ice. Such a road is usually banked, which means that the roadway is tilted toward the inside of the curve as seen in the figure. -

Circular Motion Review KEY 1. Define Or Explain the Following: A
Circular Motion Review KEY 1. Define or explain the following: a. Frequency The number of times that an object moves around a circle in a given period of time. b. Period The amount of time needed for an object to move once around a circular path. c. Hertz The standard unit of frequency. 1 cycle/second (or 1 revolution per second) d. Centripetal Force The centrally directed force that causes an object’s tangential velocity to change direction as it moves around a circle. e. Centrifugal Force The imaginary outward force which you feel as you go around a turn in a car. This “force” is a consequence of you being accelerating and your brain interpreting your tendency to move in a straight line as a force. 2. Which of the following is NOT a property of Centripetal Force? a. It is unbalanced b. It always has a real source c. It is directed outward from the center of the circle d. Its magnitude is proportional to mass e. Its magnitude is proportional to the square of speed f. Its magnitude is inversely proportional to the radius of the circle g. It is the amount of force required to turn a particular object in a particular circle 3. If an object is swung by a string in a vertical circle, explain two reasons why the string is most likely to break at the bottom of the circle. 1. The string tension needs to overcome the weight of the object to provide the needed centripetal force. 2. The object is moving the fastest at the bottom unless some force keeps the object at a constant speed as it moves around the circle. -

AP Physics 1 Investigation 3: Circular Motion How Do You Determine the Period of a Conical Pendulum?
AP Physics 1 Investigation 3: Circular Motion How do you determine the period of a conical pendulum? Central Challenge In this investigation, students use a toy that executes motion in a conical pendulum to study circular motion. Given only a meterstick and a stopwatch, they must design a procedure and make measurements to predict the period of motion of the conical pendulum. Background 1 INVESTIGATIONS AP PHYSICS A conical pendulum consists of an object moving in uniform circular motion at the end of a string of negligible mass (see Figure 1). A free-body diagram of the object is shown in Figure 2. represents the tension in the string and the gravitational force on the object is where m is the object’s mass and g is the acceleration due to gravity. Figure 1 Figure 2 The circular motion of the object is in the horizontal plane, so the horizontal component of the tension is serving as the centripetal force. Since there is no vertical motion of the object, the vertical component of the tension is equal to the gravitational force on the object. In equation form: Return to Table of Contents 77 © 2015 The College Board AP Physics 1 Investigation 3 where R is the radius of the object’s motion, v is the speed, and is the angle the string makes with the vertical, as shown in Figure 1. Combining these equations we get: The speed of an object in circular motion is given by where T is the period of the circular motion. Substituting this relationship into the equation above and rearranging we get . -

Forgotten Contributions of Huygens in Today Teaching and Learning
European J of Physics Education Volume 10 Issue 4 1309-7202 Slisko & Cruz String Tension in Pendulum and Circular Motions: Forgotten Contributions of Huygens in Today Teaching And Learning Josip Slisko Adrián Corona Cruz Facultad de Ciencias Físico Matemáticas Benemérita Universidad Autónoma de Puebla Puebla, México [email protected] (Received 30.08.2019, Accepted 22.11.2019) Abstract Many authors suggest that is necessary to include the most important episodes from physics history in teaching and learning in order to give students some ideas about the nature of science. The pendulum-related aspects are considered as very adequate for that purpose. Unfortunately, when some physics textbook authors present historical information, it is frequently incomplete and even false. In the first part of this article, we present and comment important results of Huygens’ analysis of two problems related to pendular and circular motions. These results were published in his work about centrifugal force “De vi centrifuga”. In the second part, we consider the destiny and different treatments of his results in today physics teaching and learning, noting that Huygens’ contribution is never mentioned. These treatments go from (1) testing students (and teachers’) ideas about tension force in pendular motion to (2) mathematical derivation of Huygens’ results or posing his problems to students. Finally, we briefly suggest how original results might be used to give students an idea about development of mathematical tools in physics and to explore students’ creative experimental thinking. Key words: History of physics, tension in pendulum, conceptual understanding of pendulum physics, measurement by force sensor. INTRODUCTION History of physics and science and their use in teaching were once quite polemic and controversial (Hanson, 1955; Brush, 1974), being an issue calling for critical considerations (Russel, 1981; Jung, 1994). -

Conical Pendulum
Conical pendul um – measuring g Number 13573 0-EN Topic Me ch ani cs , two -dimensional motion Version 201 7-02-17 / HS Type Student exercise Suggested for grade 11 -12 p. 1/4 Objective To determine the acceleration due to gravity by means of a conical pendulum. Principle We use a conical pendulum in this experiment. The bob performs a circular motion under the influence of the tension of the string and the force of gravity. The angle between these two forces is read on the fly on the graduated scale on the conical pendulum. The orbital period can be found with a stopwatch or with a photogate. From the measured quantities, g can be calculated. Equipment (See Detailed List of Equipment at the last page) 207010 Conical pendulum 202550 gear motor DC power supply Stand material SpeedGate – or Photogate and timer (– or Stopwatch) Frederiksen Scientific A/S Tel. +45 7524 4966 [email protected] Viaduktvej 35 · DK-6870 Ølgod Fax +45 7524 6282 www.frederiksen.eu 135730-EN Conical pendulum – measuring g p. 2/4 Setup A stable setup can be made by e.g. two table clamps and three steel rods. If you use the front and rear edges of the table the pendulum bob doesn’t have to move beyond the table top. To use a photogate for period measurements, fasten a small cardboard wing between the gear motor and the conical pendulum (see image on page 1). On a SpeedGate, select Period and Mean Period . With the motor at rest, place the string in the middle groove at the bottom of the holder; the graduated scale can now be used for adjusting the axle to a vertical position. -

Physics Education Book 1
Year 10 Extension Science Year 11-12 Physics Activities at the Gravity Discovery Centre This is my book (name)………………………………………. Page 1 of 13 Lyndon Smith Gravity Discovery Centre (08) 9575 7577 1098 Military Rd Gingin West WA 6503 www.gravitycentre.com.au Page 2 of 13 Lyndon Smith Gravity Discovery Centre Index Page Chapter 4 Pendulums 14 Eddy Currents 17 Time Travel 20 The Cable 23 Lenz’s law 26 Galileo 29 Interferometer 31 Vacuum Parachute 33 Ion Drive 35 Levitation 37 Space Junk 40 Curved Space 42 Magnetic Spring 44 Vibrations 46 Tessellations Page 3 of 13 Lyndon Smith Gravity Discovery Centre Exhibit : Outdoors 31, 32, 33, & 34 Name : Various Pendulums [Pendula!] Supplied Equipment: 3 different Pendulums Your own Equipment: Stopwatch Tape measure Calculator This booklet Introduction: WHAT IS A PENDULUM The word comes from the Latin word "Pendulus" which means hanging Something hanging from a fixed point which, when pulled back and released, is free to swing down by force of gravity and then out and up. The weight at the bottom is called a "BOB" You find pendulums all around you in clocks, swings, and clothing as you move, electric power lines in the wind etc. They provide a great study tool for investigating the scientific method from a low to a very sophisticated level Harmonic motion is the term used to describe motion that repeats itself over and over. An oscillator is something that makes harmonic motion. The waves at a beach or a pendulum are good examples of oscillators. Some definitions for you: A cycle is one complete back and forth motion. -
Circular Motion
More Circular Motion Physics 1425 Lecture 10 Michael Fowler, UVa. The Conical Pendulum • A mass moving in a • a horizontal circle, suspended by a string or rod from a θ fixed point above. T • If the tension in the string or rod is T, and the string is θ degrees from the vertical, mg Tsinθ = mv2 / r , Tcosθ = mg , tanθ = v2 / rg . F= ma for the Conical Pendulum • Notice how vector addition • a gives F= mg += T ma θ T ma ma mg T mg Conical Pendulum as Control • An early steam engine: as the conical pendulum rotates faster, driven by the engine, the masses rise and the levers cut back the steam supply. • It can be preset to keep the engine within a given speed range. Car on Flat Circular Road • For steady speed v on a • a road of radius r, there must be a centripetal 2 Fc = mv/ r force mv2/r. • This is provided by friction between the tires and the road: at maximum nonskid speed N F=µµ N = mg = mv2 / r fr s s Ffr Total Road Force on Car • The actual force F on road • A the car from the road is the vector sum of the F= NF + θ road fr normal force and the fr frictional force. • Notice the forces on the car have the same configuration as the mg conical pendulum! • At maximum nonskid speed, F road is at an angle θθfr , tanfr=FN fr / = µs . Banked Road: Sheet of Ice • The normal force is always perpendicular to • a the road surface. -

Simple Pendulum
The (Not So) Simple Pendulum ©2007-2008 Ron Doerfler Dead Reckonings: Lost Art in the Mathematical Sciences http://www.myreckonings.com/wordpress December 29, 2008 Pendulums are the defining feature of pendulum clocks, of course, but today they don’t elicit much thought. Most modern “pendulum” clocks simply drive the pendulum to provide a historical look, but a great deal of ingenuity originally went into their design in order to produce highly accurate clocks. This essay explores horologic design efforts that were so important at one time—not gearwork, winding mechanisms, crutches or escapements (which may appear as later essays), but the surprising inventiveness found in the “simple” pendulum itself. It is commonly known that Galileo (1564-1642) discovered that a swinging weight exhibits isochronism, purportedly by noticing that chandeliers in the Pisa cathedral had identical periods despite the amplitudes of their swings. The advantage here is that the driving force for the pendulum, which is difficult to regulate, could vary without affecting its period. Galileo was a medical student in Pisa at the time and began using it to check patients’ pulse rates. Galileo later established that the period of a pendulum varies as the square root of its length and is independent of the material of the pendulum bob (the mass at the end). One thing that surprised me when I encountered it is that the escapement preceded the pendulum—the verge escapement was used with hanging weights and possibly water clocks from at least the 14th century and probably much earlier. The pendulum provided a means of regulating such an escapement, and in fact Galileo invented the pin-wheel escapement to use in a pendulum clock he designed but never built. -

Conical Pendulum Kinematics of UCM Demo
AP Physics 1 Circular Motion 20160713 www.njctl.org Topics of Uniform Circular Motion (UCM) Kinematics of UCM Click on the topic to go to that section Period, Frequency, and Rotational Velocity Dynamics of UCM Vertical UCM Buckets of Water Rollercoasters Cars going over hills and through valleys Horizontal UCM Unbanked Curves Banked Curves Conical Pendulum Kinematics of UCM Demo Return to Table of Contents Kinematics of Uniform Circular Motion Uniform circular motion: motion in a circle of constant radius at constant speed Instantaneous velocity is always tangent to circle. Kinematics of Uniform Circular Motion This acceleration is called the centripetal, or radial, acceleration, and it points towards the center of the circle. Kinematics of Uniform Circular Motion Looking at the change in velocity in the limit that the time interval becomes infinitesimally small, we see that we get two similar triangles. Δl A A B B r Δθ r r r C Δθ C Kinematics of Uniform Circular Motion If displacement is equal to velocity multiplied by time, then vt is the displacement During that same time, velocity covered in time t. changed by an amount, Δv. vt v1 r v2 v θ r 1 θ v2 Δv Kinematics of Uniform Circular Motion These are similar triangles because the angles are all congruent, so the sides must be in proportion. Δv vt Δv = v r vt 2 v Δv v 1 = v2 t r r r va = 2 θ r θ That's the magnitude of the acceleration. Kinematics of Uniform Circular Motion Transpose v2 to see the vector addition. -

Huygens and the Beginnings of Rational Mechanics
THE NEWTONIAN REVOLUTION – Part One Philosophy 167: Science Before Newton’s Principia Class 10 Huygens and the Beginnings of Rational Mechanics November 4, 2014 I. Science in the Thirty Years after Galileo’s Death .............................................................................. 1 A. The Development of Astronomy: 1642-1672 (a brief summary) …..................................... 1 B. Post-Galilean Developments in Mechanics ........................................................................... 2 C. Christiaan Huygens (1629-1695): a chronology until 1673 .................................................. 3 D. Huygens and the Measurement of g (1659) .......................................................................... 4 II. Huygens on Motion Under Perfectly Elastic Impact .......................................................................... 6 A. Hypotheses Underlying the Initial Theory …………………................................................ 6 B. The Initial Theory: Relative Motion Results ………………………………..……………... 7 C. Toward the Extended Theory: Proposition VIII …………...….………..………………….. 8 D. The Extended Theory and Its Consequences …………......................................................... 9 E. Empirical Evidence for the Two Theories ............................................................................. 10 III. Huygens on Circular Motion and Centrifugal Force ......................................................................... 11 A. The Basic Conceptualization of the Problem ....................................................................... -

Lcp 2: Motion and the Pendulum
LCP 2: MOTION AND THE PENDULUM Without the pendulum there would have been no Principia. (R.S. Westfall) All of physics comes from Galileo’s inclined plane. (Anon) Fig. 1: Dome of the Cathedral of Pisa with the “Lamp of Galileo” While watching a chandelier swing back and forth at the Cathedral of Pisa in 1583, Galileo noticed something curious. Galileo noticed that the time period to swing through one complete cycle is independent of the amplitude through which it swings…..He timed the swings with his pulse, the only timing device at hand. (IL 1) IL 1 *** IL 2 *** LCP 2: MOTION AND THE PENDULUM 2 Fig. 2: Foucault’s Pendulum, the Pantheon, Paris That was when I saw the pendulum. The sphere, hanging from a long wire set into the ceiling of the choir, swayed back and forth with isochronal majesty. I knew that the period was governed by the square root of the length of the wire and by π, that number …which binds the circumference and diameter of all possible circles…(Umberto Eco, taken from his book “Foucault’s Pendulum). IL 3 **** Description of our pendulum book just published IL 4 *** Galileo’s original description of his inclined plane experiment IL 5 **** Summary of the book on the Pendulum (scroll down to “The Ubiquitous Pendulum”) IL 6 **** A good brief history of the pendulum with nice pictures IL 7 **** An excellent video replicating Galileo’s experiment IL 8 ** A brief biography of Galileo and some of his work IL 9 ** A summary of the International Pendulum Project (IPP) © 2007, Arthur Stinner 3 LCP 2: MOTION AND THE PENDULUM Fig. -
Conical Pendulum – Prelab
Phys 131L Fall 2018 Laboratory 8: Conical Pendulum – Prelab 1 Conical pendulum A conical pendulum consists of a ball at the end of a string, which traces out a circular path as illustrated in Fig. 1. Sup- θ pose that the mass of the ball is 0.040 kg, the length of the string is 80 cm and the radius of orbit is 35 cm. 80 cm a) Apply Newton’s second law (vertical component) to de- termine the tension in the string. 35 cm Figure 1: Conical pendulum b) Apply Newton’s second law (horizontal component) to determine the time taken by the ball to complete one circular orbit. 2 Laboratory 8: Conical Pendulum – Activity The conical pendulum, shown in Figure 2, con- sists of a mass m at the end of a string of length L that moves at a constant speed around a horizon- θ tal circle of radius r. A component of the tension in the string provides the necessary force to pro- L vide the circular motion of the mass. Newton’s laws, along with the concept of centripetal accel- eration, can be used to predict an expression for the tension necessary to move the mass in a hori- r zontal circle at any given radius. The goal of this Figure 2: Conical pendulum experiment is to verify that this prediction is cor- rect. 1 Theory and experimental design A force sensor, to which the pendulum will be attached, will measure the tension in the string. You will use Newton’s laws and the concept of centripetal acceleration to derive an expression for the tension in terms of experimentally measurable quantities.