Modeling and Control of the Starter Motor and Start-Up Phase for Gas Turbines
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Download the Pbs Auxiliary Power Units Brochure
AUXILIARY POWER UNITS The PBS brand is built on 200 years of history and a global reputation for high quality engineering and production www.pbsaerospace.com AUXILIARY POWER UNITS by PBS PBS AEROSPACE Inc. with headquarters in Atlanta, GA, is the world’s leading manufacturer of small gas turbine propulsion and power products for UAV’s, target drones, small missiles and guided munitions. The demonstrated high quality and reliability of PBS gas turbine engines and power systems are refl ected in the fact that they have been installed and are being operated in several thousand air vehicle systems worldwide. The key sector for PBS Velka Bites is aerospace engineering: in-house development, production, testing, and certifi cation of small turbojet, turboprop and turboshaft engines, Auxiliary Power Units (APU), and Environmental Control Systems (ECS) proven in thousands of airplanes, helicopters, and UAVs all over the world. The PBS manufacturing program also includes precision casting, precision machining, surface treatment and cryogenics. Saphir 5 Safir 5K/G MI Saphir 5F Safir 5K/G MIS Safir 5L Safir 5K/G Z8 PBS APU Basic Parameters Basic parameters APU MODEL Electrical power Max. operating Bleed air fl ow Weight output altitude Units kVA, kW lb/min lb ft 70.4 26,200 S a fi r 5 L 0 kVA 73 → Up to 60 kVA of electric power Safír 5K/G Z8 40 kVa N/A 113.5 19,700 output Safi r 5K/G MI 20 kVa 62.4 141 19,700 Up to 70.4 lb/min of bleed air flow Safi r 5K/G MIS 6 kW 62.4 128 19,700 → Main features of PBS Safi r 5 product line → Simultaneous supply of electric -
Propeller Operation and Malfunctions Basic Familiarization for Flight Crews
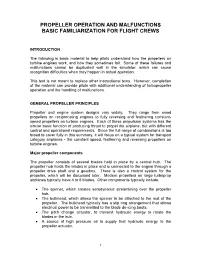
PROPELLER OPERATION AND MALFUNCTIONS BASIC FAMILIARIZATION FOR FLIGHT CREWS INTRODUCTION The following is basic material to help pilots understand how the propellers on turbine engines work, and how they sometimes fail. Some of these failures and malfunctions cannot be duplicated well in the simulator, which can cause recognition difficulties when they happen in actual operation. This text is not meant to replace other instructional texts. However, completion of the material can provide pilots with additional understanding of turbopropeller operation and the handling of malfunctions. GENERAL PROPELLER PRINCIPLES Propeller and engine system designs vary widely. They range from wood propellers on reciprocating engines to fully reversing and feathering constant- speed propellers on turbine engines. Each of these propulsion systems has the similar basic function of producing thrust to propel the airplane, but with different control and operational requirements. Since the full range of combinations is too broad to cover fully in this summary, it will focus on a typical system for transport category airplanes - the constant speed, feathering and reversing propellers on turbine engines. Major propeller components The propeller consists of several blades held in place by a central hub. The propeller hub holds the blades in place and is connected to the engine through a propeller drive shaft and a gearbox. There is also a control system for the propeller, which will be discussed later. Modern propellers on large turboprop airplanes typically have 4 to 6 blades. Other components typically include: The spinner, which creates aerodynamic streamlining over the propeller hub. The bulkhead, which allows the spinner to be attached to the rest of the propeller. -

Comparison of Helicopter Turboshaft Engines
Comparison of Helicopter Turboshaft Engines John Schenderlein1, and Tyler Clayton2 University of Colorado, Boulder, CO, 80304 Although they garnish less attention than their flashy jet cousins, turboshaft engines hold a specialized niche in the aviation industry. Built to be compact, efficient, and powerful, turboshafts have made modern helicopters and the feats they accomplish possible. First implemented in the 1950s, turboshaft geometry has gone largely unchanged, but advances in materials and axial flow technology have continued to drive higher power and efficiency from today's turboshafts. Similarly to the turbojet and fan industry, there are only a handful of big players in the market. The usual suspects - Pratt & Whitney, General Electric, and Rolls-Royce - have taken over most of the industry, but lesser known companies like Lycoming and Turbomeca still hold a footing in the Turboshaft world. Nomenclature shp = Shaft Horsepower SFC = Specific Fuel Consumption FPT = Free Power Turbine HPT = High Power Turbine Introduction & Background Turboshaft engines are very similar to a turboprop engine; in fact many turboshaft engines were created by modifying existing turboprop engines to fit the needs of the rotorcraft they propel. The most common use of turboshaft engines is in scenarios where high power and reliability are required within a small envelope of requirements for size and weight. Most helicopter, marine, and auxiliary power units applications take advantage of turboshaft configurations. In fact, the turboshaft plays a workhorse role in the aviation industry as much as it is does for industrial power generation. While conventional turbine jet propulsion is achieved through thrust generated by a hot and fast exhaust stream, turboshaft engines creates shaft power that drives one or more rotors on the vehicle. -

Helicopter Turboshafts
Helicopter Turboshafts Luke Stuyvenberg University of Colorado at Boulder Department of Aerospace Engineering The application of gas turbine engines in helicopters is discussed. The work- ings of turboshafts and the history of their use in helicopters is briefly described. Ideal cycle analyses of the Boeing 502-14 and of the General Electric T64 turboshaft engine are performed. I. Introduction to Turboshafts Turboshafts are an adaptation of gas turbine technology in which the principle output is shaft power from the expansion of hot gas through the turbine, rather than thrust from the exhaust of these gases. They have found a wide variety of applications ranging from air compression to auxiliary power generation to racing boat propulsion and more. This paper, however, will focus primarily on the application of turboshaft technology to providing main power for helicopters, to achieve extended vertical flight. II. Relationship to Turbojets As a variation of the gas turbine, turboshafts are very similar to turbojets. The operating principle is identical: atmospheric gases are ingested at the inlet, compressed, mixed with fuel and combusted, then expanded through a turbine which powers the compressor. There are two key diferences which separate turboshafts from turbojets, however. Figure 1. Basic Turboshaft Operation Note the absence of a mechanical connection between the HPT and LPT. An ideal turboshaft extracts with the HPT only the power necessary to turn the compressor, and with the LPT all remaining power from the expansion process. 1 of 10 American Institute of Aeronautics and Astronautics A. Emphasis on Shaft Power Unlike turbojets, the primary purpose of which is to produce thrust from the expanded gases, turboshafts are intended to extract shaft horsepower (shp). -
Low and High Speed Propellers for General Aviation - Performance Potential and Recent Wind Tunnel Test Results
NASA Technical Memorandum 8 1745 Low and High Speed Propellers for General Aviation - Performance Potential and Recent Wind Tunnel Test Results Robert J. Jeracki and Glenn A. Mitchell Lewis Research Center Cleveland, Ohio i I Prepared for the ! National Business Aircraft Meeting sponsored by the Society of Automotive Engineers Wichita, Kansas, April 7-10, 1981 LOW AND HIGH SPEED PROPELLERS FOR GENERAL AVIATION - PERFORMANCE POTENTIAL AND RECENT WIND TUNNEL TEST RESULTS by Robert J. Jeracki and Glenn A. Mitchell National Aeronautics and Space Administration Lewis Research Center Cleveland, Ohio 441 35 THE VAST MAJORlTY OF GENERAL-AVIATION AIRCRAFT manufactured in the United States are propel- ler powered. Most of these aircraft use pro- peller designs based on technology that has not changed significantlv since the 1940's and early 1950's. This older technology has been adequate; however, with the current world en- ergy shortage and the possibility of more stringent noise regulations, improved technol- ogy is needed. Studies conducted by NASA and industry indicate that there are a number of improvements in the technology of general- aviation (G.A.) propellers that could lead to significant energy savings. New concepts like blade sweep, proplets, and composite materi- als, along with advanced analysis techniques have the potential for improving the perform- ance and lowering the noise of future propel- ler-powererd aircraft that cruise at lower speeds. Current propeller-powered general- aviation aircraft are limited by propeller compressibility losses and limited power out- put of current engines to maximum cruise speeds below Mach 0.6. The technology being developed as part of NASA's Advanced Turboprop Project offers the potential of extending this limit to at least Mach 0.8. -

Flight Tests of Turboprop Engine with Reverse Air Intake System
TRANSACTIONS OF THE INSTITUTE OF AVIATION 3 (252) 2018, pp. 26–36 DOI: 10.2478/tar-2018-0020 © Copyright by Wydawnictwa Naukowe Instytutu Lotnictwa FLIGHT TESTS OF TURBOPROP ENGINE WITH REVERSE AIR INTAKE SYSTEM Marek Idzikowski, Wojciech Miksa Instytut Lotnictwa, Centrum Nowych Technologii Al. Krakowska 110/114, 02-256 Warsaw, Poland [email protected] Abstract This work presents selected results of I-31T propulsion flight tests, obtained in the framework of ESPOSA (Efficient Systems and Propulsion for Small Aircraft) project. I-31T test platform was equipped with TP100, a 180 kW turboprop engine. Engine installation design include reverse flow inlet and separator, controlled from the cockpit, that limited ingestion of solid particulates during ground operations. The flight tests verified proper air feed to the engine with the separator turned on and off. The carried out investigation of the intake system excluded possibility of hazardous engine -op eration, such as compressor stall, surge or flameout and potential airflow disturbance causing damaging vibration of the engine body. Finally, we present evaluation of total power losses associated with engine integration with the airframe. Keywords: light aircraft, flight tests, turboprop engine installation, turboprop engine integration, reverse air flow to engine. Abbreviations: oC – Celsius degree, temperature unit km/h – kilometers per hour, speed unit ∆P – power loss m – meter, altitude and length unit ∆TORQ – engine torque loss at shaft mm/s – millimeter per second, imbalance -

Hydromatic Propeller
HYDROMATIC PROPELLER International Historic Engineering Landmark Hamilton Standard The American Society of A Division of United Technologies Mechanical Engineers Windsor Locks, Connecticut November 8, 1990 Historical Significance The text of this International Landmark Designation: The Hamilton Standard Hydromatic propeller represented INTERNATIONAL HISTORIC MECHANICAL a major advance in propeller design and laid the groundwork ENGINEERING LANDMARK for further advancements in propulsion over the next 50 years. The Hydromatic was designed to accommodate HAMILTON STANDARD larger blades for increased thrust, and provide a faster rate HYDROMATIC PROPELLER of pitch change and a wider range of pitch control. This WINDSOR LOCKS, CONNECTICUT propeller utilized high-pressure oil, applied to both sides of LATE 1930s the actuating piston, for pitch control as well as feathering — the act of stopping propeller rotation on a non-functioning The variable-pitch aircraft propeller allows the adjustment engine to reduce drag and vibration — allowing multiengined in flight of blade pitch, making optimal use of the engine’s aircraft to safely continue flight on remaining engine(s). power under varying flight conditions. On multi-engined The Hydromatic entered production in the late 1930s, just aircraft it also permits feathering the propeller--stopping its in time to meet the requirements of the high-performance rotation--of a nonfunctioning engine to reduce drag and military and transport aircraft of World War II. The vibration. propeller’s performance, durability and reliability made a The Hydromatic propeller was designed for larger blades, major contribution to the successful efforts of the U.S. and faster rate of pitch change, and wider range of pitch control Allied air forces. -

Introduction to Turboprop Engine Types
INTRODUCTION TO TURBOPROP ENGINE TYPES The turbopropeller engine consists of a gas turbine engine driving a propeller. Most of the energy of the gas flow (air and burned fuel) is used to drive the propeller and compressor. The remaining energy, in the form of differential velocity of the airflow exiting the turbine, provides a small amount of residual thrust (effectively, a small amount of jet propulsion). Additional information on the specifics of the gas turbine cycle is provided elsewhere in this training package. There are two basic types of turboprop engines: 1. Single shaft 2. Free turbine The main difference between single shaft and free turbines is in the transmission of the power to the propeller. In the majority of turboprops, the fuel pump is driven by the engine. This is known as "direct drive.” In some older types of engines, the fuel pump is driven by the propeller, which can affect proper response to an engine failure. Refer to type-specific procedures. Single Shaft. In a single-shaft engine, the propeller is driven by the same shaft (spool) that drives the compressor. Because the propeller needs to rotate at a lower RPM than the turbine, a reduction gearbox reduces the engine shaft rotational speed to accommodate the propeller through the propeller drive shaft. Free Turbine. In a free-turbine engine, the propeller is driven by a dedicated turbine. A different turbine drives the compressor; this turbine and its compressor run at near-constant RPM regardless of the propeller pitch and speed. Because the propeller needs to rotate at lower RPM than the turbine, a reduction gearbox converts the turbine RPM to an appropriate level for the propeller. -

Design of a Turbofan Engine Cycle with Afterburner for a Conceptual UAV
Design of a Turbofan Engine Cycle with Afterburner for a Conceptual UAV BJÖRN MONTGOMERIE Mixed fl ow turbofan schematic FOI is an assignment-based authority under the Ministry of Defence. The core activities are research, method and technology development, as well as studies for the use of defence and security. The organization employs around 1350 people of whom around 950 are researchers. This makes FOI the largest research institute in Sweden. FOI provides its customers with leading expertise in a large number of fi elds such as security-policy studies and analyses in defence and security, assessment of dif- ferent types of threats, systems for control and management of crises, protection against and management of hazardous substances, IT-security an the potential of new sensors. FOI Defence Research Agency Phone: +46 8 555 030 00 www.foi.se Systems Technology Fax: +46 8 555 031 00 FOI-R-- 1835 --SE Scientifi c report Systems Technology SE-164 90 Stockholm ISSN 1650-1942 December 2005 Björn Montgomerie Design of a Turbofan Engine Cycle with Afterburner for a Conceptual UAV FOI-R--1835--SE Scientific report Systems Technology ISSN 1650-1942 December 2005 Issuing organization Report number, ISRN Report type FOI – Swedish Defence Research Agency FOI-R--1835--SE Scientific report Systems Technology Research area code SE-164 90 Stockholm 7. Mobility and space technology, incl materials Month year Project no. December 2005 E830058 Sub area code 71 Unmanned Vehicles Sub area code 2 Author/s (editor/s) Project manager Björn Montgomerie Fredrik Haglind Approved by Monica Dahlén Sponsoring agency Swedish Defense Materiel Administration (FMV) Scientifically and technically responsible Fredrik Haglind Report title Design of a Turbofan Engine Cycle with Afterburner for a Conceptual UAV Abstract A study of two turbofan engine types has been carried out. -

Strong Vibrations in Flight with Right Propeller Electronic Control Warning
Published: September 2019 INVESTIGATION REPORT Incident to the ATR 72-212A operated by Caribbean Airlines registered 9Y-TTC on 4 May 2014 at top of descent to Piarco airport (Republic of Trinidad and Tobago) Bureau d’Enquêtes et d’Analyses pour la sécurité de l’aviation civile Ministère de la Transition Écologique et Solidaire Safety investigations The BEA is the French Civil Aviation Safety Investigation Authority. Its investigations are conducted with the sole objective of improving aviation safety and are not intended to apportion blame or liabilities. BEA investigations are independent, separate and conducted without prejudice to any judicial or administrative action that may be taken to determine blame or liability. SPECIAL FOREWORD TO ENGLISH EDITION This is a courtesy translation by the BEA of the Final Report on the Safety Investigation published in July 2019. As accurate as the translation may be, the original text in French is the work of reference. 2 9Y-TTC - 04 May 2014 Contents SAFETY INVESTIGATIONS 2 SYNOPSIS 7 ORGANISATION OF THE INVESTIGATION 10 1 - FACTUAL INFORMATION 11 1.1 History of the flight 11 1.2 Similar events 14 1.2.1 Event on 22 March 2007 at Tenerife to an ATR 72-212A registered EC-IYC 14 1.2.2 Event on 4 April 2012 in Zanzibar to an ATR 72-212A registered 5H-PWD 15 1.2.3 Event on 7 January 2013 in Brazil to an ATR 72-212A registered PR-TKA 15 1.2.4 Event on 27 August 2013 in Tanzania to an ATR 72-212A registered 5H-PWG 15 1.2.5 Event on 18 September 2013 in Indonesia to an ATR 72-212A registered PK- WFV 16 -

Jet Propulsion Engines
JET PROPULSION ENGINES 5.1 Introduction Jet propulsion, similar to all means of propulsion, is based on Newton’s Second and Third laws of motion. The jet propulsion engine is used for the propulsion of aircraft, m issile and submarine (for vehicles operating entirely in a fluid) by the reaction of jet of gases which are discharged rearw ard (behind) with a high velocity. A s applied to vehicles operating entirely in a fluid, a momentum is imparted to a mass of fluid in such a manner that the reaction of the imparted momentum furnishes a propulsive force. The magnitude of this propulsive force is termed as thrust. For efficient production of large power, fuel is burnt in an atmosphere of compressed air (combustion chamber), the products of combustion expanding first in a gas turbine which drives the air compressor and then in a nozzle from which the thrust is derived. Paraffin is usually adopted as the fuel because of its ease of atomisation and its low freezing point. Jet propulsion was utilized in the flying Bomb, the initial compression of the air being due to a divergent inlet duct in which a sm all increase in pressure energy w as obtained at the expense of kinetic energy of the air. Because of this very limited compression, the thermal efficiency of the unit was low, although huge power was obtained. In the normal type of jet propulsion unit a considerable improvement in efficiency is obtained by fitting a turbo-com pressor which w ill give a com pression ratio of at least 4:1. -
04 Propulsion
Aircraft Design Lecture 2: Aircraft Propulsion G. Dimitriadis and O. Léonard APRI0004-1, Aerospace Design Project, Lecture 4 1 Introduction • A large variety of propulsion methods have been used from the very start of the aerospace era: – No propulsion (balloons, gliders) – Muscle (mostly failed) – Steam power (mostly failed) – Piston engines and propellers – Rocket engines – Jet engines – Pulse jet engines – Ramjet – Scramjet APRI0004-1, Aerospace Design Project, Lecture 4 2 Gliding flight • People have been gliding from the- mid 18th century. The Albatross II by Jean Marie Le Bris- 1849 Otto Lillienthal , 1895 APRI0004-1, Aerospace Design Project, Lecture 4 3 Human-powered flight • Early attempts were less than successful but better results were obtained from the 1960s onwards. Gerhardt Cycleplane (1923) MIT Daedalus (1988) APRI0004-1, Aerospace Design Project, Lecture 4 4 Steam powered aircraft • Mostly dirigibles, unpiloted flying models and early aircraft Clément Ader Avion III (two 30hp steam engines, 1897) Giffard dirigible (1852) APRI0004-1, Aerospace Design Project, Lecture 4 5 Engine requirements • A good aircraft engine is characterized by: – Enough power to fulfill the mission • Take-off, climb, cruise etc. – Low weight • High weight increases the necessary lift and therefore the drag. – High efficiency • Low efficiency increases the amount fuel required and therefore the weight and therefore the drag. – High reliability – Ease of maintenance APRI0004-1, Aerospace Design Project, Lecture 4 6 Piston engines • Wright Flyer: One engine driving two counter- rotating propellers (one port one starboard) via chains. – Four in-line cylinders – Power: 12hp – Weight: 77 kg APRI0004-1, Aerospace Design Project, Lecture 4 7 Piston engine development • During the first half of the 20th century there was considerable development of piston engines.