Efficiency Estimation of Roller Chain Power Transmission System
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Forklift Differentials
Forklift Differentials Forklift Differential - A mechanical device which could transmit rotation and torque through three shafts is known as a differential. At times but not at all times the differential would use gears and will operate in two ways: in automobiles, it provides two outputs and receives one input. The other way a differential works is to combine two inputs in order to produce an output that is the sum, average or difference of the inputs. In wheeled vehicles, the differential enables all tires to be able to rotate at various speeds while supplying equal torque to all of them. The differential is intended to drive a pair of wheels with equivalent torque while enabling them to rotate at various speeds. While driving around corners, a car's wheels rotate at different speeds. Several vehicles such as karts operate without using a differential and use an axle instead. If these vehicles are turning corners, both driving wheels are forced to spin at the same speed, normally on a common axle which is driven by a simple chain-drive mechanism. The inner wheel should travel a shorter distance compared to the outer wheel while cornering. Without using a differential, the effect is the outer wheel dragging and or the inner wheel spinning. This puts strain on drive train, causing unpredictable handling, difficult driving and damage to the tires and the roads. The amount of traction necessary to move the car at whichever given moment depends on the load at that moment. How much drag or friction there is, the car's momentum, the gradient of the road and how heavy the automobile is are all contributing factors. -

Flexible Wheel Chair
GRD Journals- Global Research and Development Journal for Engineering | Volume 1 | Issue 8 | July 2016 ISSN: 2455-5703 Flexible Wheel Chair Mahantesh Tanodi Department of Mechanical Engineering Hirasugar Institute of Technology, Nidasoshi, Karnataka (India) Sujata Huddar S. B. Yapalaparvi Department of Electrical and Electronics Engineering Department of Mechanical Engineering Hirasugar Institute of Technology, Nidasoshi, Karnataka Hirasugar Institute of Technology, Nidasoshi, Karnataka (India) (India) Abstract The wheelchair is one of the most commonly used assistive devices for enhancing personal mobility, which is a precondition for enjoying human rights and living in dignity and assists people with disabilities to become more productive members of their communities. For many people, an appropriate, well-designed and well-fitted wheelchair can be the first step towards inclusion and participation in society. When the need is not met, people with disabilities are isolated and do not have access to the same opportunities as others within their own communities. Providing wheelchairs that are fit for the purpose not only enhances mobility but begins a process of opening up a world of education, work and social life [1]. The development of national policies and increased training opportunities in the design, production and supply of wheelchairs are essential next steps. Every human being need to move from one place another to fulfill his requirements and to accomplish that requirements he will travel from one place to another place by walking which is a basic medium of transportation. But it is exceptional in case of physically disables (Persons don’t have both legs). In order to support and help such a person’s we designed a special manually lever operated wheel chair. -

Owner's Manual
IBD-Mountain EN 07-01-19 m0520 © Batch Bicycles Ltd 2019 PLEASE VISIT YOUR AUTHORIZED BATCH RETAILER FOR SERVICE AND QUESTIONS. Batch Bicycles 8889 Gander Creek Dr. Dayton, OH 45342 833.789.8899 batchbicycles.com OWNER’S MANUAL for Mountain Bikes BATCH Limited Warranty We’ve Got You Covered damage, failure, or loss that is caused by improper Owner’s Manual Index Batch Bicycles comes with our industry’s best war- assembly, maintenance, adjustment, storage, or ranty program – Batch Bicycles Service Program. use of the product. This limited warranty does not Safety and Warnings ...........................................................................................2-5 Once your Batch Bicycle is registered, Batch extend to future performance. Bicycles provides each original retail purchaser of a Batch Bicycle a warranty against defects in materi- This Limited Warranty will be void if the prod- Assembly and Parts ..............................................................................................6-18 als and workmanship, as stated below: uct is ever: • Used in any competitive sport Brake System .............................................................................................................. 19-22 General: • Used for stunt riding, jumping, aerobatics or Warranty Part or model specifi cations are subject to change similar activity without notice. • Modifi ed in any way Shift System .................................................................................................................. 23-29 This Limited Warranty -
Adjustments and Settings Electronic Groupsets
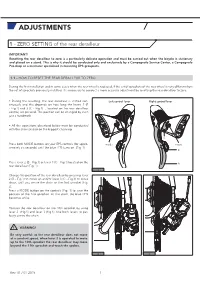
ADJUSTMENTS 1 - ZERO SETTING of the rear derailleur IMPORTANT! Resetting the rear derailleur to zero is a particularly delicate operation and must be carried out when the bicycle is stationary and placed on a stand. This is why it should be conducted only and exclusively by a Campagnolo Service Center, a Campagnolo Pro-shop or a mechanic specialised in mounting EPS groupsets. 1.1 - HOW TO RESET THE REAR DERAILLEUR TO ZERO During the first installation and in some cases when the rear wheel is replaced, if the set of sprockets of the new wheel is very different from the set of sprockets previously installed, it is necessary to conduct a more accurate adjustment by resetting the rear derailleur to zero. • During the resetting, the rear derailleur is shifted con- Left control lever Right control lever tinuously and this depends on how long the levers 2 (B - Fig.1) and 3 (C - Fig.1) , located on the rear derailleur control, are pressed. The position can be changed by even just a hundredth. • All the operations described below must be conducted with the chain placed on the biggest chainring. C Press both MODE buttons on your EPS controls (for appro- mode mode ximately six seconds) until the blue LED turns on (Fig. 1). B Press lever 2 (B - Fig.1) or lever 3 (C - Fig.1) located on the A rear derailleur (Fig. 1). 1 Change the position of the rear derailleur by pressing lever 2 (B - Fig.1) to move up and/or lever 3 (C - Fig.1) to move down, until you centre the chain on the 2nd sprocket (Fig. -
ASME/ANSI RS Roller Chain Technical Information
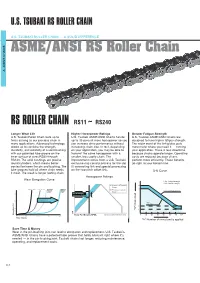
U.S. TSUBAKI RS ROLLER CHAIN U.S. TSUBAKI ROLLER CHAIN — A SOLID DIFFERENCE ASME/ANSI RS Roller Chain A - DRIVE CHAINS RS ROLLER CHAIN RS11 ˜ RS240 Longer Wear Life Higher Horsepower Ratings Greater Fatigue Strength U.S. Tsubaki Roller Chain lasts up to U.S. Tsubaki ASME/ANSI Chains handle U.S. Tsubaki ASME/ANSI Chains are twice as long as our previous chain in up to 33 percent more horsepower so you designed to have higher fatigue strength. many applications. Advanced technology can increase drive performance without The wider waist of the link plates puts allows us to combine the strength, increasing chain size. In fact, depending more metal where you need it — running durability, and reliability of a solid bushing on your application, you may be able to your application. There is less downtime with our patented lube groove on the transmit the same horsepower with a because chains operate longer. Operating inner surface of sizes RS80 through smaller, less costly chain. The costs are reduced because chains RS140. The solid bushings are precise improvement comes from a U.S. Tsubaki perform more efficiently. These benefits round cylinders, which means better exclusive ring coining process for the slip go right to your bottom line. contact between the pin and bushing. The fit connecting link and special processing lube grooves hold oil where chain needs on the two-pitch offset link. S-N Curve it most. The result is longer lasting chain. Horsepower Ratings Wear Elongation Curve A & a: Fatigue strength B & b: Tensile strength Improved Tsubaki B Chain b Competitor A Competitor B Previous Improved Previous Tsubaki Tsubaki Tsubaki Improved Tsubaki Chain Chain Chain Chain 1.5 33% Increase in Horespower Rating 1.0 RS80-RS140 Other roller chain A .05 "S" Chain load a HP HP 2 3 4 5 6 7 Elongation (%) * Ratings are for RS80-RS240 Roller Chains 1 10 10 0 50 100 150 200 Revs Per Minute (RPM) 10 10 10 10 10 Time (Hours) "N" Number of times load is applied Save Time & Money Wear in the pin-bushing joint can lead to elongation and replacement. -
Chapter 1 Introduction
國立交通大學 機械工程研究所 碩士論文 變速自行車鏈條設計 Design of Chains on Multi-speed Bicycles 研究生:張崇銘 指導教授:曾錦煥 教授 中華民國九十三年六月 變速自行車鏈條設計 Design of Chains on Multi-speed Bicycles 研究生:張崇銘 Student: Chung-Ming Chang 指導教授:曾錦煥 Advisor: Ching-Huan Tseng 國立交通大學 機械工程研究所 碩士論文 A Thesis Submitted to Institute of Mechanical Engineering College of Engineering National Chiao Tung University in Partial Fulfillment of the Requirements for the Degree of Master of Science in Mechanical Engineering June 2004 Hsinchu, Taiwan, Republic of china 中華民國九十三年六月 變速自行車鏈條設計 研究生:張崇銘 指導教授:曾錦煥 國立交通大學機械工程研究所 摘要 本論文主要研究對象為自行車上傳動系統中的鏈條元件,由於自行車飛 輪受到車架、騎乘姿勢所形成的空間限制,必須在有限空間內增加飛輪片 數增加齒數比,達到變速換檔的舒適性。因此,為了配合這樣緊密的飛輪, 鏈條寬度的縮減是必須的。經過專利的整理後,確定空間尺寸和強度為初 步設計的主要需求;提出不同的概念設計,並利用新的鏈條連結機構來達 到鏈條寬度的縮減。 本文提出概念設計較目前市面上自行車最窄的鏈條寬度更窄,強度部份 利用有限元素分析法做定性分析,比較各個設計的相對強度;此外也經由 原型的製作,檢視其機構的問題。 i Design of Chain on Multi-speed Bicycle Student: Chung-Ming Chang Advisor: Ching-Huan Tseng Institute of Mechanical Engineering National Chiao Tung University ABSTRACT This study focuses on the chain for the multi-speed bicycle. Design space for the freewheel on bicycle is limited by frame, riding posture, etc. However, the number of gear ratios in this design space increased with added more sprockets are the trend on the bicycles. Therefore, reduction of chain width is necessary for working with this compact freewheel. Space and strength are main requirements in the beginning of design according to literatures and patents review. Several new concepts are proposed, and these concepts use the linkage mechanism to achieve the reduction of chain width. Chain width of these concepts proposed in this study can be reduced under the assumption for fixed design space and thickness of sprockets. The finite element method is used to compare the trend of strength among these concepts. -
Friction-Producing Mechanisms of a Bicycle Chain
Friction-Producing Mechanisms of a Bicycle Chain _ Effectiveness of Chain Lubricants for Reducing Frictional Losses Copyright ©2014 Friction Facts, LLC rev 5-13-14 Overview The friction-producing mechanisms of a bicycle chain moving through a derailleur-style drivetrain are unique and relatively complex. These friction- producing mechanisms arise from friction created in individual links, which are subjected to multiple regions of both high and low pressure, reciprocating sliding forces, and stiction. As such, testing methods for chain efficiency and chain lubricants must address these complex mechanisms. This paper explores the details of how friction is created in a bicycle chain in a modern-derailleur style drivetrain, the role of chain lubricants to minimize friction in a chain, and the limitations of commonly-used friction test methods. This paper also suggests a testing process to analyze the efficiency of a chain and lubricant in a manner specifically relevant to chain friction-producing mechanisms. Friction-Producing Mechanisms of a Chain From a simplified standpoint, the friction created (wasted energy) by a roller chain is generally proportional to: [chain tension] x [sine of lateral deflection] x [link articulation angle at a given engagement or disengagement point] x [number of link articulations per unit time at that point] x [total engagement and disengagement points in the complete drivetrain]. This basic formula has been demonstrated by multiple drivetrain studies and, more recently, by tests performed by Friction Facts. Essentially, friction is created each time an individual link, under a finite level of tension, bends (articulates) as it engages or disengages the teeth of a cog, pulley, or chainring. -

Technical Engineering Guide
TTEECHCHNINICALCAL EN ENGGINEEINEERRININGG 89 www.diamondchain.com TECHNICAL ENGINEERING General Drive Considerations One of the main advantages of the roller chain drive is its ability to perform well under widely varying conditions. Despite this ability, there are a number of rules of good design practice which, if considered early in the design pro- cess, will enable the user to obtain desirable results. Basic dimensions and minimum ultimate tensile requirements for single-pitch, double-pitch and attachment roller chains are specified by various standards organizations worldwide. ASME/ANSI, The American Society of Mechanical Engineers and The American National Standards Institute, defines dimensions such as: pitch, roller width, roller diameter, link plate height, link plate thickness and pin diameter. The primary purpose of the standard is to ensure that manufacturers will produce chains and sub-assemblies that are similar dimensionally and therefore interchangeable. In addition, the standard does offer the user some assurance of quality by defining a minimum ultimate tensile strength for each model of chain. However, tensile strength is not always a valid method to differentiate one manufacturer’s product from another. It is very important to remember that dimensional standardization does not define quality or performance characteristics. Minimum Ultimate Tensile Strength: Minimum Ultimate Tensile Strength, MUTS, is the static load required to break the chain. Tensile strength values shown in this catalog are not allowable working loads. Load or tension applied 1 to the chain in service should never exceed ⁄6 th of the UTS. If exceeding this value is necessary for a specific applica- tion, contact Diamond Chain. -

Gear Up! Reviews: Ortlieb Vario & Carradice Backpack Panniers
WS E VI E R Bikes • Accessories • Kit Submit a review If you want to submit a review, write or email the editor – details on page 88 – Gear up! for advice on how to go about it. Each one printed wins a boxed set of three A cross-section of cycling products selected Cassini historical maps of the area of your choice. To see the whole range, and reviewed by CTC staff, specialist visit www.cassinimaps.com. To order by journalists and CTC members phone, call 0845 458 9910. BACKPACK PANNIERS £50 & £110 Reviewed by Technical Editor Chris Juden The Ortlieb Vario (near right) and Carradice Carradry Rucksack Pannier (far right) are the latest answers to a need that’s as old as the bicycle pannier. We all know that wheels make things easier to move, but normal panniers are awkward things to carry off the bike, which is one reason so many people pedal under the burden of a rucksack these days. That may be bearable for small amounts of luggage or distance, but not if you have lots to carry and it's more than a couple of miles to work or the shops. As for holidays: of course you’ll not want anything to detract from the pleasure of cycling – but if you also want to do a bit of serious hiking, on your back the load must go! Local errands and the bike-hike mix have similar but not two external sleeves (e.g. for bike bottles) and an internal identical demands, which play to the different strengths document pocket. -

Bike Tune Up
Bike Tune Up March 14, 2007 Contents What You Will Need For Tuning Your Bicycle: . 3 What if you get in over your head? . 3 Step 1: Adjust Headset . 4 Step 2: Bottom Bracket Adjustment . 6 Pedals . 7 Step 3: Adjust The Front Wheel Bike Hub . 9 Step 4: Adjust Rear Wheel Hubs . 11 Coaster Brake . 11 Three-Speed Wheels . 11 Derailleur-Equipped and BMX Bicycle Wheels . 11 Overhauling . 12 Freewheels - Overhaul, General Care and Troubleshooting . 12 Step 5: Wheel Truing . 14 Unbending A Bicycle Bent Wheel . 15 Flat Spots . 16 Kinks . 17 Broken Spokes . 17 Step 6: Bike Brake Adjustment . 19 If It Is A Sidepull Or Centerpull Brake: . 21 If It Is A Cantilever Bike Brake: . 21 Replacing A Cable . 22 The Brake Pads . 25 Diagnosing Brake Stickiness . 25 Hand Levers . 25 Step 7: Adjust The Rear Derailleur . 27 Replacing a Cable . 29 Step 8: Adjust The Front Derailleur . 31 Replacing a Cable . 33 Step 9: Finish The Tune-Up . 34 1 2 What You Will Need For Tuning Your Bicycle: • This Presentation • An adjustable wrench or set of wrenches • Tongue and groove pliers, sometimes called ”channellocks” • Bicycle bearing cone wrenches (approx. $8 at bike stores) Figure 1: cone wrench • Oil, grease, and non-flammable, non-toxic cleaning solvent • A couple of screwdrivers • A freewheel remover (maybe) Figure 2: Freewheel Remover • Patience - This is the most important ingredient What if you get in over your head? Ask a friend, or call the mechanic at the local bike shop for advice. In the worst case, you would have to take the bike into the shop and pay for professional help, which would still cost less than a complete tune-up anyway. -
WT Series Actuator Operations Manual WATCH TECHNOLOGIES W T S E R I E S Actuator Operations Manual
Water Control Devices WT Series Actuator Operations Manual WATCH TECHNOLOGIES W T S E R I E S Actuator Operations Manual Watch Technologies 2185 NE Spalding Ave, #10 Grants Pass, OR 97526 Phone 541.472.8095 06/2016 Contents Introduction ………………………………………………............ 1 Theory of Operation ………………………………………. 1 Installation and Start-up ………………………………………… 3 Safety Information ………………………………………… 3 Installation – Rising Stem ………………………………… 4 Installation – Horizontal Gearlift …………………………. 12 Seasonal Start-Up ………………………………………………. 16 Operation ………………………………………………………… 18 Manual Operation ………………………………………… 19 Automated Operation Using Internal RTU ……………… 20 Handwheel Operation …………………………………….. 20 Maintenance and Troubleshooting ……………………………. 21 Troubleshooting Guide …………………………………… 22 Shut-Down and Storage ………………………………………... 23 System Integration and Options ………………………………. 24 Electrical System …………………………………………. 24 Gate Blade Position Sensor ………………………………25 Solar Panel and Charge Controller ……………………... 27 RUG3 Remote Terminal Unit ……………………………. 28 WT Actuator and Gearmotor Specifications ……………29 – 39 Warranty Information …………………………………………… 41 WATER CONTROL DEVICE S Introduction The WT Series of gate control actuators from Watch Technologies have been developed for the ultimate control of a wide variety of applications. he WT Series consists of five distinct models to address the needs of both vertical rising stem gate users as well as systems utilizing T horizontal shaft gear lifts. A wide variety of drive motors enable the WT Series to align with specific torque requirements. The WT Series can also be configured with an embedded Remote Terminal Unit (RTU) which enables the actuator to function as a stand-alone, smart device that can remotely control gates based upon user-defined control points and water status parameters (flow, level). Theory of Operation The philosophy behind each Watch Technologies product is providing long- lived, reliable devices that can be easily installed, maintained, adjusted and upgraded by our customers using simple tools and basic skills. -

Rear Derailleur
(English) DM-RD0004-08 Dealer's Manual ROAD MTB Trekking City Touring/ URBAN SPORT E-BIKE Comfort Bike Rear Derailleur XTR RD-M9000 DEORE XT RD-M8000 CONTENTS IMPORTANT NOTICE .............................................................................................3 TO ENSURE SAFETY ...............................................................................................4 LIST OF TOOLS TO BE USED ..................................................................................6 INSTALLATION .......................................................................................................8 Installation of the rear derailleur ................................................................................................................8 ADJUSTMENT ......................................................................................................11 Stroke adjustment ......................................................................................................................................11 Installation of the chain .............................................................................................................................12 Securing the cable ......................................................................................................................................13 Using the end adjust bolt ..........................................................................................................................17 SIS adjustment ............................................................................................................................................18