Study on Radar Echo-Filling in an Occlusion Area by a Deep Learning Algorithm
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Project Stormy Weather Began in 1943
61 Chapter 8 The Stormy Weather Group (Canada) R.H. Douglas,* McGill University 1 INTRODUCTION nated, and the McGill group carried on as the Stormy Weather Group. years later Project Stormy Weather began in 1943. Thirty Marshall (1973) recalls that "the first contribution of of the Marshall (1973), reviewing the accomplishments Project Stormy Weather, within the CAORG, was time meteorology and cloud Stormy Weather Group in radar lapse photography of the PPI scope. (By telephoning an estimated 500 scientists physics, noted that (in 1973) around the Ottawa Valley, it was established that there in weather radar, the around the world were involved was rain where the radar screen glowed, and that rain from a handful in 1943. number having increased linearly started at a given point just after the echo moved over that the Stormy Weather Group, Quoting Marshall, "Activity of point on the screen.) Viewing these films as movies, one roughly one-sixth continuous for thirty years, represented sensed a new approach to storm dynamics and a potential about one of the whole until, say, 1963, and represents for short-term forecasting. The showing of Stormy Weather ( 19 73 ) ." Thus Marshall twelfth of the larger activity now films to American scientific meetings did much to stimulate and his colleagues in the Group have enjoyed a continuing interest in weather radar." in the development of and advances and significant role The early radar equipment consisted of a microwave but relatively recent in this (by now) well-established height-finding unit at Ottawa and early warning units at branch of the meteorological sciences. -

A History of Radar Meteorology: People, Technology, and Theory
A History of Radar Meteorology: People, Technology, and Theory Jeff Duda Overview • Will cover the period from just before World War II through about 1980 – Pre-WWII – WWII – 1940s post-WWII – 1950s – 1960s – 1970s 2 3 Pre-World War II • Concept of using radio waves established starting in the very early 1900s (Tesla) • U.S. Navy (among others) tried using CW radio waves as a “trip beam” to detect presence of ships • First measurements of ionosphere height made in 1924 and 1925 – E. V. Appleton and M. A. F. Barnett of Britain on 11 December 1924 – Merle A. Tuve (Johns Hopkins) and Gregory Breit (Carnegie Inst.) in July 1925 • First that used pulsed energy instead of CW 4 Pre-World War II • Robert Alexander Watson Watt • “Death Ray” against Germans • Assignment given to Arnold F. “Skip” Wilkins: – “Please calculate the amount of radio frequency power which should be radiated to raise the temperature of eight pints of water from 98 °F to 105 °F at a distance of 5 km and a height of 1 km.” – Not feasible with current power production Watson Watt 5 Pre-World War II • Watson Watt and Wilkins pondered whether radio waves could be used merely to detect aircraft • Memo drafted by Watson Watt on February 12, 1935: “Detection of Aircraft by Radio Methods” – Memo earned Watson Watt the title of “the father of radar” – Term “RADAR” officially coined as an acronym by U.S. Navy Lt. Cmdr. Samuel M. Tucker and F. R. Furth in November 1940 • The Daventry experiment – February 26, 1935 – First recorded detection of aircraft by radio waves – Began the full-speed-ahead -
PDF: Judkins Dreams and Visions
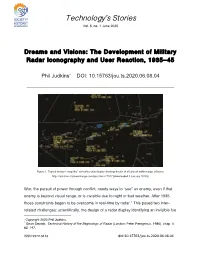
Technology’s Stories Vol. 8, no. 1 June 2020 Dreams and Visions: The Development of Military Radar Iconography and User Reaction, 1935–45 ∗ Phil Judkins DOI: 10.15763/jou.ts.2020.06.08.04 __________________________________________________________ Figure 1. Typical modern “map-like” air traffic radar display showing details of all aircraft within range. (Source: https://aviation.stackexchange.com/questions/12327 [downloaded 3 January 2020].) War, the pursuit of power through conflict, needs ways to “see” an enemy, even if that enemy is beyond visual range, or is invisible due to night or bad weather. After 1935, those constraints began to be overcome in real-time by radar.1 This posed two inter- related challenges; scientifically, the design of a radar display identifying an invisible foe ∗ Copyright 2020 Phil Judkins. 1 Sean Swords, Technical History of the Beginnings of Radar (London: Peter Peregrinus, 1986), chap. 4, 82–147. ISSN 2572-3413 doi:10.15763/jou.ts.2020.06.08.04 Dreams and Visions—Judkins June 2020 and their location was a non-trivial challenge—but also, in parallel, “a way to see the enemy” is psychological. To quote Cristina Masters, “death is a dot on a screen.”2 Did killing then in some sense become more acceptable? How did design, use and user interact? Memoirs and oral histories show, for different reasons, little psychological impact of displays on commanders or face-to-face combatants, but the rapid expansion of radar drew into the killing process one little-studied group, the first female radar operators, and further research is needed to identify their reactions. -

Doppler Weather Radar System
Compact Dual Polarimetric X-band Doppler Weather Radar WR-2100 ▲ Classied as one of the smallest and lightest Dual Polarimetric Doppler Classied as one of the smallest and lightest Weather Radar available in the market (Radome diameter: 108 cm, Radome weight: 65 kg) ▲ Weather Radar available in the market* High-precision, real-time monitoring of precipitation intensity (mm/h) ▲ Outputs moving velocity of nimbus ▲ Outputs dual polarimetric Doppler information (Zdr, Kdp) for computing FURUNO, which has earned the leading market share in marine Radar, provides Dual Polarimetric X-band diameter of precipitation particles as well as discriminating types of Doppler Weather Radar WR-2100 and Doppler Weather Radar WR-50. precipitation (rain, snow, etc.) ▲ 3D scan to observe the vertical structure of a cumulonimbus ▲ With ultra high denition spatiotemporal resolution capability, the WR-2100 Dual Polarimetric Doppler Suitable for localised meteorological monitoring as well as for monitoring Compact and light weight! Weather Radar grasps omni-directional precipitation intensity in 50-metre-mesh in six-second-intervals. of short localised rainstorm, when networked into “Multi-Radar System” The antenna unit can be tucked in a By conducting high spatiotemporal resolution monitoring of the development process, three-dimensional minivand to the monitoring location. structure as well as movement of a cumulonimbus, which causes precipitation, the development of short Compact X-band Doppler Weather Radar WR-50 localised rainstorms can be predicted. Moreover, the WR-2100 has been downsized during the development ▲ phase to the extent that can be classied as one of the smallest and lightest Dual Polarimetric Doppler Compact, light-weight Radome antenna (Radome diameter: 60 cm, Radome weight: 28 kg) ▲ Weather Radar available in the market. -

Radar Measurements
CHAPTER CONTENTS Page CHAPTER 7. RADAR MEASUREMENTS ............................................... 680 7.1 General ................................................................... 680 7.1.1 The weather radar ................................................... 680 7.1.2 Radar characteristics, terms and units .................................. 681 7.1.3 Radar accuracy requirements ......................................... 681 7.2 Radar principles ............................................................ 682 7.2.1 Pulse radars ........................................................ 682 7.2.2 Propagation radar signals. 686 7.2.3 Attenuation in the atmosphere ........................................ 687 7.2.4 Scattering by clouds and precipitation .................................. 688 7.2.5 Scattering in clear air. 689 7.3 The radar equation for precipitation targets .................................... 689 7.4 Basic weather radar system and data .......................................... 691 7.4.1 Reflectivity ......................................................... 691 7.4.2 Doppler velocity .................................................... 692 7.4.3 Dual polarization .................................................... 694 7.5 Signal and data processing .................................................. 696 7.5.1 The Doppler spectrum ............................................... 696 7.5.2 Power parameter estimation .......................................... 696 7.5.3 Ground clutter and point targets ..................................... -

Word Template for Papers to Be Submitted to Eucap 2016
2017 11th European Conference on Antennas and Propagation (EUCAP) Propagation Effects in the Application of Weather Radar – Positive and Negative Impact Martin Hagen1, Jens Reimann2 1 DLR Institut für Physik der Atmosphäre, Oberpfaffenhofen, Germany, [email protected] 2 DLR Institut für Hochfrequenztechnik und Radarsysteme, Oberpfaffenhofen, Germany Abstract—Propagation effects play in important role in the application of weather radar. Attenuation and depolarization TABLE II. CHARACTERISTICS OF WEATHER RADAR have negative effects on the quality of radar data and hinder rainfall estimation, whereas the differential propagation phase Parameter Value can be used for the quantification of precipitation and even pulse peak power 10 – 1000 kW correction of attenuation effects. pulse duration 0.6 – 2 µs Index Terms—weather radar, propagation, measurement. pulse repetition frequency 300 – 2500 Hz I. INTRODUCTION half-power beam width 1 – 3° Weather radar is used in Meteorology for the maximum range 100 – 300 km identification and quantification of precipitation systems like thunderstorms or weather fronts. Weather radars operate with range resolution 90 – 300 m centimeter wavelength. In order to observe non-precipitating antenna rotation speed 2 – 6 rpm clouds millimeter-wave radars are used. The propagation of electromagnetic waves through the atmosphere and clouds or precipitation is affected by the are normally displayed either in a geo-referenced PPI (plan respective media. While the primary objective of weather position indicator), or interpolated to a constant altitude radar is the measurement of properties of precipitation like CAPPI (constant altitude plan position indicator). Often the rain rate of hydrometeor type, propagation effects often reflectivity or rain rate product is composed to national or hinder such measurements. -

Radar Meteorology
RADAR METEOROLOGY P.S.Biju [email protected] Courtesy: Presentations of Dr.D.Pradhan, Scientist-G, DDGM(UI),New Delhi, Shri.S.B.Thampi,DDGM,Chennai & Dr.Y.K.Reddi, Scientist-F,MCHyderabad Chapter 1: Introduction RADAR is an acronym for Radio Detection and Ranging. Similar principle is Light Detection and Ranging (LIDAR) used in ceilometers. So many other similar principles are there with Detection and Ranging (DAR) having the same equation for range measurement. Radar principle is explained in the following figure: The similar principle LIDAR is illustrated below: 1 Range of Radar Radar is an electronic device which is capable of transmitting an electromagnetic signal, receiving back an echo from a target, and determining various things about the target from the characteristics of the received signal. Range is the distance of the target given by the values of c and t , which is explained as h = ct/2 . Milestones of weather radar • 1842 : Doppler effect • 1888: Electromagnetic waves discovered by Hertz • 1922 : Detection of ships by radio waves by Marconi • 1947: The first weather radar in Washington D.C. • 1990: Introduction of Doppler weather radar • 2000: Doppler weather radars in India 2 Electromagnetic wave A wave propagation containing mutually perpendicular electric and magnetic fields perpendicular to the direction of propagation. Light wave is an example of electromagnetic wave Polarisation of radar signal The direction of propagation of electric field in an electromagnetic wave is known as polarisation. Hence an electromagnetic wave used in radar is either horizontally or vertically polarised. S-band Doppler weather radar of IMD is horizontally polarised and C-band is dual polarised (both horizontal and vertical). -

Chapter 2 Essentials
Chapter 2 Essentials A brief description of the fundamentals of remote sensing of precipitation by means of radar measurements will be given in the first section of this chapter. Subsequently, the products of the BALTEX radar centre BRDC will be introduced. 2.1 Fundamentals Many publication deals with the fundamentals of radar meteorology. This is the reason, why this section is comparatively short and will introduce only the most important terms, as far as they are indispensable for the understanding of this study. For a more substantial description I wish to refer to basic literature, such as the books of Atlas (1990) and Battan (1973). Precipitation is a generic term for water in solid or liquid form that falls from the sky as part of the weather to the earth’s surface. The precipitation amount, that falls to surface is indeed a two-dimensional representation of a three-dimensional reality above ground. Pre- cipitation in appreciable amounts can be produced by two basic types of mechanism. One is the spontaneous (or free) lifting of humid air, and the other is the forced lifting of humid air. Spontaneous rise are associated with strong up-drafts within convection cells. Free lifting is associated with frontal systems. Radar The term "radar" originally stands for Radio Aircraft Detection and Ranging. This points to the first task of radar in its history, the detection of aircrafts for military use. At- mospheric hydrometeors interfered the beam frequently, so that the possible benefit for me- teorological use was quickly recognised. General speaking, radar is a system, that uses radio waves for positioning of targets in the atmosphere. -

Training Material on Weather Radar Systems
WORLD METEOROLOGICAL ORGANIZATION INSTRUMENTS AND OBSERVING METHODS REPORT No. 88 TRAINING MATERIAL ON WEATHER RADAR SYSTEMS E. Büyükbas (Turkey) O. Sireci (Turkey) A. Hazer (Turkey) I. Temir (Turkey) A. Macit (Turkey) C. Gecer (Turkey) WMO/TD-No. 1308 2006 NOTE The designations employed and the presentation of material in this publication do not imply the expression of any opinion whatsoever on the part of the Secretariat of the World Meteorological Organization concerning the legal status of any country, territory, city or area, or its authorities, or concerning the limitation of the frontiers or boundaries. This report has been produced without editorial revision by the Secretariat. It is not an official WMO publication and its distribution in this form does not imply endorsement by the Organization of the ideas expressed. FOREWORD The Thirteenth Session of the Commission for Instruments and Methods of Observation (CIMO) recognized the need for training and placed a greater emphasis on these issues as it planned its activities for its 13th Intersessional period. As next generation weather radars system are deployed the need for more in depth training in instrument and platform siting, operation, calibration, lightning safety and maintenance has been requested. Within this document the team of experts from Turkey, led by Mr Büyükbas, provided training materials that address the basic training needs requested by Commission Members. This excellent work will undoubtedly become a useful tool in training staff in many aspects of operating and maintaining weather radar systems. I wish to express our sincere gratitude to Mr Büyükbas and his colleagues in preparing such a fine series of documents. -
Guide for Users
FSI Four-dimensional Stormcell Investigator D-2D Extension And Graphical User Interface GGuuiiddee ffoorr UUsseerrss Version OB7.2 alpha Second Version: April 17, 2007 Greg Stumpf Decision Assistance Branch – Multi-Sensor Applications NWS - MDL FSI User’s Guide: OB7.2 alpha Page 1 of 34 TABLE OF CONTENTS -INTRODUCTION- 4 -THE FSI EXTENSION IN D-2D- 6 Loading the Extension 6 Launching the FSI 6 -THE FSI WINDOW- 7 A Summary of the FSI Components 7 What do you see when the FSI is launched? 7 Menu Bar 7 Button Panel 8 Radar Status Bar 11 Plan Position Indicator (PPI) Panel 11 Vertical Dynamic Cross Section (VDX) Panel 11 Constant Altitude Plan Position Indicator (CAPPI) Panel 12 Three-Dimensional Flier (3DF) Panel 12 PPI Panel Usage 13 The Data Area 13 Zoom 13 Pan 13 Vertical Cross-Section Control Tool 13 VDX Panel Usage 14 The Data Area 14 Reading the Legends 15 Interpolation Toggle 15 Change Vertical Height 15 Change Horizontal Width 16 Change Position 16 CAPPI Panel Usage 16 The Data Area 16 Reading the Legends 16 Change Vertical Height 17 Zoom 17 Pan 17 Interpolation Toggle 17 3DF Panel Usage 18 The Data Area 18 Reading the Legends 18 Toggling the cross-section surfaces 18 Vertical Cross-Section Control Tool 19 3D Rotate 19 3D Zoom 19 3D Pan 19 FSI User’s Guide: OB7.2 alpha Page 2 of 34 Resetting to a Plan View 20 Changing Radar Products 20 RPS List 20 Reflectivity (Z) 20 Velocity (V) 20 Storm-Relative Velocity Map (SRM) 20 Spectrum Width (SW) 20 Z/SRM8 toggle (Cycle) 20 Browsing the Radar Data 21 Virtual Volume Scans 21 AutoUpdate 21