Khovanov Homology Is an Unknot-Detector
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Khovanov Homology of Rational Tangles
The Khovanov Homology of Rational Tangles Benjamin Thompson A thesis submitted for the degree of Bachelor of Philosophy with Honours in Pure Mathematics of The Australian National University October, 2016 Dedicated to my family. Even though they’ll never read it. “To feel fulfilled, you must first have a goal that needs fulfilling.” Hidetaka Miyazaki, Edge (280) “Sleep is good. And books are better.” (Tyrion) George R. R. Martin, A Clash of Kings “Let’s love ourselves then we can’t fail to make a better situation.” Lauryn Hill, Everything is Everything iv Declaration Except where otherwise stated, this thesis is my own work prepared under the supervision of Scott Morrison. Benjamin Thompson October, 2016 v vi Acknowledgements What a ride. Above all, I would like to thank my supervisor, Scott Morrison. This thesis would not have been written without your unflagging support, sublime feedback and sage advice. My thesis would have likely consisted only of uninspired exposition had you not provided a plethora of interesting potential topics at the start, and its overall polish would have likely diminished had you not kept me on track right to the end. You went above and beyond what I expected from a supervisor, and as a result I’ve had the busiest, but also best, year of my life so far. I must also extend a huge thanks to Tony Licata for working with me throughout the year too; hopefully we can figure out what’s really going on with the bigradings! So many people to thank, so little time. I thank Joan Licata for agreeing to run a Knot Theory course all those years ago. -

On Spectral Sequences from Khovanov Homology 11
ON SPECTRAL SEQUENCES FROM KHOVANOV HOMOLOGY ANDREW LOBB RAPHAEL ZENTNER Abstract. There are a number of homological knot invariants, each satis- fying an unoriented skein exact sequence, which can be realized as the limit page of a spectral sequence starting at a version of the Khovanov chain com- plex. Compositions of elementary 1-handle movie moves induce a morphism of spectral sequences. These morphisms remain unexploited in the literature, perhaps because there is still an open question concerning the naturality of maps induced by general movies. In this paper we focus on the spectral sequences due to Kronheimer-Mrowka from Khovanov homology to instanton knot Floer homology, and on that due to Ozsv´ath-Szab´oto the Heegaard-Floer homology of the branched double cover. For example, we use the 1-handle morphisms to give new information about the filtrations on the instanton knot Floer homology of the (4; 5)-torus knot, determining these up to an ambiguity in a pair of degrees; to deter- mine the Ozsv´ath-Szab´ospectral sequence for an infinite class of prime knots; and to show that higher differentials of both the Kronheimer-Mrowka and the Ozsv´ath-Szab´ospectral sequences necessarily lower the delta grading for all pretzel knots. 1. Introduction Recent work in the area of the 3-manifold invariants called knot homologies has il- luminated the relationship between Floer-theoretic knot homologies and `quantum' knot homologies. The relationships observed take the form of spectral sequences starting with a quantum invariant and abutting to a Floer invariant. A primary ex- ample is due to Ozsv´athand Szab´o[15] in which a spectral sequence is constructed from Khovanov homology of a knot (with Z=2 coefficients) to the Heegaard-Floer homology of the 3-manifold obtained as double branched cover over the knot. -

Khovanov Homology, Its Definitions and Ramifications
KHOVANOV HOMOLOGY, ITS DEFINITIONS AND RAMIFICATIONS OLEG VIRO Uppsala University, Uppsala, Sweden POMI, St. Petersburg, Russia Abstract. Mikhail Khovanov defined, for a diagram of an oriented clas- sical link, a collection of groups labelled by pairs of integers. These groups were constructed as homology groups of certain chain complexes. The Euler characteristics of these complexes are coefficients of the Jones polynomial of the link. The original construction is overloaded with algebraic details. Most of specialists use adaptations of it stripped off the details. The goal of this paper is to overview these adaptations and show how to switch between them. We also discuss a version of Khovanov homology for framed links and suggest a new grading for it. 1. Introduction For a diagram D of an oriented link L, Mikhail Khovanov [7] constructed a collection of groups Hi;j(D) such that X j i i;j K(L)(q) = q (−1) dimQ(H (D) ⊗ Q); i;j where K(L) is a version of the Jones polynomial of L. These groups are constructed as homology groups of certain chain complexes. The Khovanov homology has proved to be a powerful and useful tool in low dimensional topology. Recently Jacob Rasmussen [16] has applied it to problems of estimating the slice genus of knots and links. He defied a knot invariant which gives a low bound for the slice genus and which, for knots with only positive crossings, allowed him to find the exact value of the slice genus. Using this technique, he has found a new proof of Milnor conjecture on the slice genus of toric knots. -

Computational Complexity of Problems in 3-Dimensional Topology
[NoVIKOV 1962] For n > 5, THERE DOES NOT EXIST AN ALGORITHM WHICH solves: n Computational COMPLEXITY ISSPHERE: Given A TRIANGULATED M IS IT n OF PROBLEMS IN HOMEOMORPHIC TO S ? 3-dimensional TOPOLOGY Thm (Geometrization + MANY Results) TherE IS AN ALGORITHM TO DECIDE IF TWO COMPACT 3-mflDS ARE homeomorphic. Nathan DunfiELD University OF ILLINOIS SLIDES at: http://dunfield.info/preprints/ Today: HoW HARD ARE THESE 3-manifold questions? HoW QUICKLY CAN WE SOLVE them? NP: YES ANSWERS HAVE PROOFS THAT CAN BE Decision Problems: YES OR NO answer. CHECKED IN POLYNOMIAL time. k x F pi(x) = 0 SORTED: Given A LIST OF integers, IS IT sorted? SAT: Given ∈ 2 , CAN CHECK ALL IN LINEAR time. SAT: Given p1,... pn F2[x1,..., xk] IS k ∈ x F pi(x) = 0 i UNKNOTTED: A DIAGRAM OF THE UNKNOT WITH THERE ∈ 2 WITH FOR ALL ? 11 c CROSSINGS CAN BE UNKNOTTED IN O(c ) UNKNOTTED: Given A PLANAR DIAGRAM FOR K 3 Reidemeister MOves. [LackENBY 2013] IN S IS K THE unknot? A Mn(Z) INVERTIBLE: Given ∈ DOES IT HAVE AN INVERSE IN Mn(Z)? coNP: No ANSWERS CAN BE CHECKED IN POLYNOMIAL time. UNKNOTTED: Yes, ASSUMING THE GRH P: Decision PROBLEMS WHICH CAN BE SOLVED [KuperberG 2011]. IN POLYNOMIAL TIME IN THE INPUT size. SORTED: O(LENGTH OF LIST) 3.5 1.1 INVERTIBLE: O n log(LARGEST ENTRY) NKNOTTED IS IN . Conj: U P T KNOTGENUS: Given A TRIANGULATION , A KNOT b1 = 0 (1) IS KNOTGENUS IN P WHEN ? K T g Z 0 K ⊂ , AND A ∈ > , DOES BOUND AN ORIENTABLE SURFACE OF GENUS 6 g? IS THE HOMEOMORPHISM PROBLEM FOR [Agol-Hass-W.Thurston 2006] 3-manifolds IN NP? KNOTGENUS IS NP-complete. -

Categorified Invariants and the Braid Group
PROCEEDINGS OF THE AMERICAN MATHEMATICAL SOCIETY Volume 143, Number 7, July 2015, Pages 2801–2814 S 0002-9939(2015)12482-3 Article electronically published on February 26, 2015 CATEGORIFIED INVARIANTS AND THE BRAID GROUP JOHN A. BALDWIN AND J. ELISENDA GRIGSBY (Communicated by Daniel Ruberman) Abstract. We investigate two “categorified” braid conjugacy class invariants, one coming from Khovanov homology and the other from Heegaard Floer ho- mology. We prove that each yields a solution to the word problem but not the conjugacy problem in the braid group. In particular, our proof in the Khovanov case is completely combinatorial. 1. Introduction Recall that the n-strand braid group Bn admits the presentation σiσj = σj σi if |i − j|≥2, Bn = σ1,...,σn−1 , σiσj σi = σjσiσj if |i − j| =1 where σi corresponds to a positive half twist between the ith and (i + 1)st strands. Given a word w in the generators σ1,...,σn−1 and their inverses, we will denote by σ(w) the corresponding braid in Bn. Also, we will write σ ∼ σ if σ and σ are conjugate elements of Bn. As with any group described in terms of generators and relations, it is natural to look for combinatorial solutions to the word and conjugacy problems for the braid group: (1) Word problem: Given words w, w as above, is σ(w)=σ(w)? (2) Conjugacy problem: Given words w, w as above, is σ(w) ∼ σ(w)? The fastest known algorithms for solving Problems (1) and (2) exploit the Gar- side structure(s) of the braid group (cf. -

Research Statement 1 TQFT and Khovanov Homology
Miller Fellow 1071 Evans Hall, University of California, Berkeley, CA 94720 +1 805 453-7347 [email protected] http://tqft.net/ Scott Morrison - Research statement 1 TQFT and Khovanov homology During the 1980s and 1990s, surprising and deep connections were found between topology and algebra, starting from the Jones polynomial for knots, leading on through the representation theory of a quantum group (a braided tensor category) and culminating in topological quantum field theory (TQFT) invariants of 3-manifolds. In 1999, Khovanov [Kho00] came up with something entirely new. He associated to each knot diagram a chain complex whose homology was a knot invariant. Some aspects of this construction were familiar; the Euler characteristic of his complex is the Jones polynomial, and just as we had learnt to understand the Jones polynomial in terms of a braided tensor category, Khovanov homology can now be understood in terms of a certain braided tensor 2-category. But other aspects are more mysterious. The categories associated to quantum knot invariants are essentially semisimple, while those arising in Khovanov homology are far from it. Instead they are triangulated, and exact triangles play a central role in both definitions and calculations. My research on Khovanov homology attempts to understand the 4-dimensional geometry of Khovanov homology ( 1.1). Modulo a conjecture on the functoriality of Khovanov homology in 3 § S , we have a construction of an invariant of a link in the boundary of an arbitrary 4-manifold, generalizing the usual invariant in the boundary of the standard 4-ball. While Khovanov homology and its variations provide a ‘categorification’ of quantum knot invariants, to date there has been no corresponding categorification of TQFT 3-manifold in- variants. -

RASMUSSEN INVARIANTS of SOME 4-STRAND PRETZEL KNOTS Se
Honam Mathematical J. 37 (2015), No. 2, pp. 235{244 http://dx.doi.org/10.5831/HMJ.2015.37.2.235 RASMUSSEN INVARIANTS OF SOME 4-STRAND PRETZEL KNOTS Se-Goo Kim and Mi Jeong Yeon Abstract. It is known that there is an infinite family of general pretzel knots, each of which has Rasmussen s-invariant equal to the negative value of its signature invariant. For an instance, homo- logically σ-thin knots have this property. In contrast, we find an infinite family of 4-strand pretzel knots whose Rasmussen invariants are not equal to the negative values of signature invariants. 1. Introduction Khovanov [7] introduced a graded homology theory for oriented knots and links, categorifying Jones polynomials. Lee [10] defined a variant of Khovanov homology and showed the existence of a spectral sequence of rational Khovanov homology converging to her rational homology. Lee also proved that her rational homology of a knot is of dimension two. Rasmussen [13] used Lee homology to define a knot invariant s that is invariant under knot concordance and additive with respect to connected sum. He showed that s(K) = σ(K) if K is an alternating knot, where σ(K) denotes the signature of−K. Suzuki [14] computed Rasmussen invariants of most of 3-strand pret- zel knots. Manion [11] computed rational Khovanov homologies of all non quasi-alternating 3-strand pretzel knots and links and found the Rasmussen invariants of all 3-strand pretzel knots and links. For general pretzel knots and links, Jabuka [5] found formulas for their signatures. Since Khovanov homologically σ-thin knots have s equal to σ, Jabuka's result gives formulas for s invariant of any quasi- alternating− pretzel knot. -

Sutured Khovanov Homology Distinguishes Braids from Other Tangles J
Math. Res. Lett. c 2014 International Press Volume 21, Number 06, 1263–1275, 2014 Sutured Khovanov homology distinguishes braids from other tangles J. Elisenda Grigsby and Yi Ni We show that the sutured Khovanov homology of a balanced tangle in the product sutured manifold D × I hasrank1ifandonlyif the tangle is isotopic to a braid. 1. Introduction In [11], Khovanov constructed a categorification of the Jones polynomial that assigns a bigraded abelian group to each link in S3. Sutured Khovanov homology is a variant of Khovanov’s construction that assigns • to each link L in the product sutured manifold A × I (see Section 2.1) a triply-graded vector space SKh(L)overF := Z/2Z [1, 19], where A = S1 × [0, 1] and I =[0, 1]; and • to each balanced, admissible tangle T in the product sutured manifold D × I (see Section 2.2) a bigraded vector space SKh(T )overF [6, 13], where D = D2. Khovanov homology detects the unknot [14] and unlinks [3, 8], and the sutured annular Khovanov homology of braid closures detects the trivial braid [2]. In this note, we prove that the sutured Khovanov homology of balanced tangles distinguishes braids from other tangles. Theorem 1.1. Let T ⊂ D × I be a balanced, admissible tangle. (See Sec- ∼ tion 2.2 for the definition.) Then SKh(T ) = F if and only if T is isotopic to a braid in D × I. Theorem 1.1 is one of many results about the connection between Floer homology and Khovanov homology, starting with the work of Ozsv´ath and Szab´o [18]. -

The Spectral Sequence from Khovanov Homology to Heegaard Floer Homology and Transverse Links
The Spectral Sequence from Khovanov Homology to Heegaard Floer Homology and Transverse Links Author: Adam Saltz Persistent link: http://hdl.handle.net/2345/bc-ir:106790 This work is posted on eScholarship@BC, Boston College University Libraries. Boston College Electronic Thesis or Dissertation, 2016 Copyright is held by the author. This work is licensed under a Creative Commons Attribution-NoDerivatives 4.0 International License (http://creativecommons.org/licenses/ by-nd/4.0/). The Spectral Sequence from Khovanov Homology to Heegaard Floer Homology and Transverse Links Adam Saltz A dissertation submitted to the Faculty of the department of Mathematics in partial fulfillment of the requirements of the degree of Doctor of Philosophy. Boston College Morrissey College of Arts and Sciences April 2016 c Copyright 2016 by Adam Saltz The Spectral Sequence from Khovanov Homology to Heegaard Floer Homology and Transverse Links Adam Saltz Advisor: Professor John Arthur Baldwin, PhD Abstract Khovanov homology and Heegaard Floer homology have opened new horizons in knot theory and three-manifold topology, respectively. The two invariants have distinct origins, but the Khovanov homology of a link is related to the Heegaard Floer homology of its branched double cover by a spectral sequence constructed by Ozsv´athand Szab´o. In this thesis, we construct an equivalent spectral sequence with a much more trans- parent connection to Khovanov homology. This is the first step towards proving Seed and Szab´o'sconjecture that Szab´o'sgeometric spectral sequence is isomorphic to Ozsv´athand Szab´o'sspectral sequence. These spectral sequences connect information about contact structures contained in each invariant. -

1 Introduction
Contents | 1 1 Introduction Is the “cable spaghetti” on the floor really knotted or is it enough to pull on both ends of the wire to completely unfold it? Since its invention, knot theory has always been a place of interdisciplinarity. The first knot tables composed by Tait have been motivated by Lord Kelvin’s theory of atoms. But it was not until a century ago that tools for rigorously distinguishing the trefoil and its mirror image as members of two different knot classes were derived. In the first half of the twentieth century, knot theory seemed to be a place mainly drivenby algebraic and combinatorial arguments, mentioning the contributions of Alexander, Reidemeister, Seifert, Schubert, and many others. Besides the development of higher dimensional knot theory, the search for new knot invariants has been a major endeav- our since about 1960. At the same time, connections to applications in DNA biology and statistical physics have surfaced. DNA biology had made a huge progress and it was well un- derstood that the topology of DNA strands matters: modeling of the interplay between molecules and enzymes such as topoisomerases necessarily involves notions of ‘knot- tedness’. Any configuration involving long strands or flexible ropes with a relatively small diameter leads to a mathematical model in terms of curves. Therefore knots appear almost naturally in this context and require techniques from algebra, (differential) geometry, analysis, combinatorics, and computational mathematics. The discovery of the Jones polynomial in 1984 has led to the great popularity of knot theory not only amongst mathematicians and stimulated many activities in this direction. -

More on Khovanov Homology
MORE ON KHOVANOV HOMOLOGY Radmila Sazdanovic´ NC State Summer School on Modern Knot Theory Freiburg 6 June 2017 WHERE WERE WE? • Classification of knots- using knot invariants! • Q How can we get better invariants? A By upgrading/categorifying old ones! • Khovanov link homology lifts the Jones polynomial. ! X X J(L)(q) = ( 1)i rkKh(L) qj = χ(Kh(L)) − j i skein relation long exact sequence of Kh(L) () • Q Why does the choice of algebra A make sense? A1 It’s graded dimension is J( ) A2 Frobenius algebra structure is an algebraic counterpart of the topology of 2d TQFT. KHOVANOV HOMOLOGY IS STRONGER THAN THE JONES POLYNOMIAL i i Kh(10 ) Kh(51) 132 -5 -4 -3 -2 -1 0 -7 -6 -5 -4 -3 -2 -1 0 -1 Z Z -3 Z -3 Z2 Z -5 Z -5 Z Z2 -7 Z -7 Z Z2 Z2 j -9 Z2 j -9 Z Z2 Z -11 ⊕ Z Z -11 Z Z -13 2 Z -13 Z2 -15 Z -15 Z • Torsion is invisible for the Jones! • Kh(K ) can have non-trivial groups of the same rank in gradings of different parity! They cancel out in the Euler characteristic. 1 1 KHOVANOV HOMOLOGY DIFFERENT COEFFICIENTS • So far: Kh(K ; Z) and Kh(K ; Q) • Next: Kh(K ; Zp) and Kh(K ; Z2) in particular. • How do these homologies relate? THEOREM (UNIVERSAL COEFFICIENT THEOREM) n n n+1 H (C; Zp) = H (C; Z) Zp Tor(H (C); Zp) ∼ ⊗ ⊕ Or in the language of Khovanov link homology: i;j i;j i+1;j Kh (K ; Zp) = Kh (K ; Z) Zp Tor(Kh (K ; Zp)) ∼ ⊗ ⊕ HOW TO COMPUTE? Tor(A; B) = 0 if A or B is free or torsion-free, Tor(Zp; Zq) = ZGCD(p;q) Z Zp = Zp, Zp Zq = ZGCD(p;q), Z2 Z3 = 0, Z6 Z4 = Z2 ⊗ ⊗ ⊗ ⊗ ODD, EVEN, UNIFIED KHOVANOV Kh Even (standard) Khovanov homology Kho Odd (Ozsvath,´ Rasmussen, Szabo´ 2007) 2 Khu Unified theory over R = Z["]=(" 1) (Putyra, 2010) − MODZ2 even or odd theory computed over Z2 RELATIONS BETWEEN THEORIES • Kh(L; Z2) ∼= Kho(L; Z2) • If D0 is the mirror of D then • Both Khovanov chain complexes and homologies are dual. -
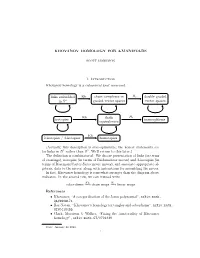
KHOVANOV HOMOLOGY for 4-MANIFOLDS 1. Introduction
KHOVANOV HOMOLOGY FOR 4-MANIFOLDS SCOTT MORRISON 1. Introduction Khovanov homology is a categorical knot invariant. links embedded Kh chain complexes in H∗ doubly graded in S3 graded vector spaces vector spaces Kh chain H∗ isotopies isomorphisms equivalences Kh 2-isotopies / 3-isotopies homotopies (Actually, this description is over-optimistic; the honest statements are for links in B3 rather than S3. We'll return to this later.) The definition is combinatorial. We choose presentation of links (in terms of crossings), isotopies (in terms of Reidemeister moves) and 2-isotopies (in terms of Roseman/Carter-Saito movie moves), and associate appropriate al- gebraic data to the pieces, along with instructions for assembling the pieces. In fact, Khovanov homology is somewhat stronger than the diagram above indicates. In the second row, we can instead write cobordisms −−!Kh chain maps −−!H∗ linear maps References • Khovanov, \A categorification of the Jones polynomial", arXiv:math. QA/9908171. • Bar-Natan, \Khovanov's homology for tangles and cobordisms", arXiv:math. GT/0410495. • Clark, Morrison & Walker, \Fixing the functoriality of Khovanov homology", arXiv:math.GT/0701339. Date: January 21 2011. 1 2 SCOTT MORRISON How do we build a 4-manifold invariant out of these pieces? With the right language in place, there's an idiomatic construction. The above data is sufficient to build a \disklike" 4-category, and then we can follow a stan- dard recipe to produce an invariant of 4-manifolds. I'm not going to at- tempt to describe in general what a disklike 4-category is, or give the recipe in full generality.