Modular Design of High-Throughput, Low-Latency Sorting Units
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
The Analysis and Synthesis of a Parallel Sorting Engine Redacted for Privacy Abstract Approv, John M
AN ABSTRACT OF THE THESIS OF Byoungchul Ahn for the degree of Doctor of Philosophy in Electrical and Computer Engineering, presented on May 3. 1989. Title: The Analysis and Synthesis of a Parallel Sorting Engine Redacted for Privacy Abstract approv, John M. Murray / Thisthesisisconcerned withthe development of a unique parallelsort-mergesystemsuitablefor implementationinVLSI. Two new sorting subsystems, a high performance VLSI sorter and a four-waymerger,werealsorealizedduringthedevelopment process. In addition, the analysis of several existing parallel sorting architectures and algorithms was carried out. Algorithmic time complexity, VLSI processor performance, and chiparearequirementsfortheexistingsortingsystemswere evaluated.The rebound sorting algorithm was determined to be the mostefficientamongthoseconsidered. The reboundsorter algorithm was implementedinhardware asasystolicarraywith external expansion capability. The second phase of the research involved analyzing several parallel merge algorithms andtheirbuffer management schemes. The dominant considerations for this phase of the research were the achievement of minimum VLSI chiparea,design complexity, and logicdelay. Itwasdeterminedthattheproposedmerger architecture could be implemented inseveral ways. Selecting the appropriate microarchitecture for the merger, given the constraints of chip area and performance, was the major problem.The tradeoffs associated with this process are outlined. Finally,apipelinedsort-merge system was implementedin VLSI by combining a rebound sorter -

Can We Overcome the Nlog N Barrier for Oblivious Sorting?
Can We Overcome the n log n Barrier for Oblivious Sorting? ∗ Wei-Kai Lin y Elaine Shi z Tiancheng Xie x Abstract It is well-known that non-comparison-based techniques can allow us to sort n elements in o(n log n) time on a Random-Access Machine (RAM). On the other hand, it is a long-standing open question whether (non-comparison-based) circuits can sort n elements from the domain [1::2k] with o(kn log n) boolean gates. We consider weakened forms of this question: first, we consider a restricted class of sorting where the number of distinct keys is much smaller than the input length; and second, we explore Oblivious RAMs and probabilistic circuit families, i.e., computational models that are somewhat more powerful than circuits but much weaker than RAM. We show that Oblivious RAMs and probabilistic circuit families can sort o(log n)-bit keys in o(n log n) time or o(kn log n) circuit complexity. Our algorithms work in the indivisible model, i.e., not only can they sort an array of numerical keys | if each key additionally carries an opaque ball, our algorithms can also move the balls into the correct order. We further show that in such an indivisible model, it is impossible to sort Ω(log n)-bit keys in o(n log n) time, and thus the o(log n)-bit-key assumption is necessary for overcoming the n log n barrier. Finally, after optimizing the IO efficiency, we show that even the 1-bit special case can solve open questions: our oblivious algorithms solve tight compaction and selection with optimal IO efficiency for the first time. -

CS 758/858: Algorithms
CS 758/858: Algorithms ■ COVID Prof. Wheeler Ruml Algorithms TA Sumanta Kashyapi This Class Complexity http://www.cs.unh.edu/~ruml/cs758 4 handouts: course info, schedule, slides, asst 1 2 online handouts: programming tips, formulas 1 physical sign-up sheet/laptop (for grades, piazza) Wheeler Ruml (UNH) Class 1, CS 758 – 1 / 25 COVID ■ COVID Algorithms This Class Complexity ■ check your Wildcat Pass before coming to campus ■ if you have concerns, let me know Wheeler Ruml (UNH) Class 1, CS 758 – 2 / 25 ■ COVID Algorithms ■ Algorithms Today ■ Definition ■ Why? ■ The Word ■ The Founder This Class Complexity Algorithms Wheeler Ruml (UNH) Class 1, CS 758 – 3 / 25 Algorithms Today ■ ■ COVID web: search, caching, crypto Algorithms ■ networking: routing, synchronization, failover ■ Algorithms Today ■ machine learning: data mining, recommendation, prediction ■ Definition ■ Why? ■ bioinformatics: alignment, matching, clustering ■ The Word ■ ■ The Founder hardware: design, simulation, verification ■ This Class business: allocation, planning, scheduling Complexity ■ AI: robotics, games Wheeler Ruml (UNH) Class 1, CS 758 – 4 / 25 Definition ■ COVID Algorithm Algorithms ■ precisely defined ■ Algorithms Today ■ Definition ■ mechanical steps ■ Why? ■ ■ The Word terminates ■ The Founder ■ input and related output This Class Complexity What might we want to know about it? Wheeler Ruml (UNH) Class 1, CS 758 – 5 / 25 Why? ■ ■ COVID Computer scientist 6= programmer Algorithms ◆ ■ Algorithms Today understand program behavior ■ Definition ◆ have confidence in results, performance ■ Why? ■ The Word ◆ know when optimality is abandoned ■ The Founder ◆ solve ‘impossible’ problems This Class ◆ sets you apart (eg, Amazon.com) Complexity ■ CPUs aren’t getting faster ■ Devices are getting smaller ■ Software is the differentiator ■ ‘Software is eating the world’ — Marc Andreessen, 2011 ■ Everything is computation Wheeler Ruml (UNH) Class 1, CS 758 – 6 / 25 The Word: Ab¯u‘Abdall¯ah Muh.ammad ibn M¯us¯aal-Khw¯arizm¯ı ■ COVID 780-850 AD Algorithms Born in Uzbekistan, ■ Algorithms Today worked in Baghdad. -

Parallel Sorting Algorithms + Topic Overview
+ Design of Parallel Algorithms Parallel Sorting Algorithms + Topic Overview n Issues in Sorting on Parallel Computers n Sorting Networks n Bubble Sort and its Variants n Quicksort n Bucket and Sample Sort n Other Sorting Algorithms + Sorting: Overview n One of the most commonly used and well-studied kernels. n Sorting can be comparison-based or noncomparison-based. n The fundamental operation of comparison-based sorting is compare-exchange. n The lower bound on any comparison-based sort of n numbers is Θ(nlog n) . n We focus here on comparison-based sorting algorithms. + Sorting: Basics What is a parallel sorted sequence? Where are the input and output lists stored? n We assume that the input and output lists are distributed. n The sorted list is partitioned with the property that each partitioned list is sorted and each element in processor Pi's list is less than that in Pj's list if i < j. + Sorting: Parallel Compare Exchange Operation A parallel compare-exchange operation. Processes Pi and Pj send their elements to each other. Process Pi keeps min{ai,aj}, and Pj keeps max{ai, aj}. + Sorting: Basics What is the parallel counterpart to a sequential comparator? n If each processor has one element, the compare exchange operation stores the smaller element at the processor with smaller id. This can be done in ts + tw time. n If we have more than one element per processor, we call this operation a compare split. Assume each of two processors have n/p elements. n After the compare-split operation, the smaller n/p elements are at processor Pi and the larger n/p elements at Pj, where i < j. -
Sorting Networks
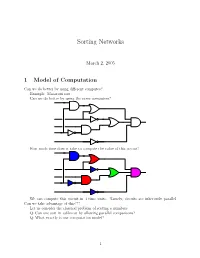
Sorting Networks March 2, 2005 1 Model of Computation Can we do better by using different computes? Example: Macaroni sort. Can we do better by using the same computers? How much time does it take to compute the value of this circuit? We can compute this circuit in 4 time units. Namely, circuits are inherently parallel. Can we take advantage of this??? Let us consider the classical problem of sorting n numbers. Q: Can one sort in sublinear by allowing parallel comparisons? Q: What exactly is our computation model? 1 1.1 Computing with a circuit We are going to design a circuit, where the inputs are the numbers, and we compare two numbers using a comparator gate: ¢¤¦© ¡ ¡ Comparator ¡£¢¥¤§¦©¨ ¡ For our drawings, we will draw such a gate as follows: ¢¡¤£¦¥¨§ © ¡£¦ So, circuits would just be horizontal lines, with vertical segments (i.e., gates) between them. A complete sorting network, looks like: The inputs come on the wires on the left, and are output on the wires on the right. The largest number is output on the bottom line. The surprising thing, is that one can generate circuits from a sorting algorithm. In fact, consider the following circuit: Q: What does this circuit does? A: This is the inner loop of insertion sort. Repeating this inner loop, we get the following sorting network: 2 Alternative way of drawing it: Q: How much time does it take for this circuit to sort the n numbers? Running time = how many time clocks we have to wait till the result stabilizes. In this case: 5 1 2 3 4 6 7 8 9 In general, we get: Lemma 1.1 Insertion sort requires 2n − 1 time units to sort n numbers. -

Investigating the Effect of Implementation Languages and Large Problem Sizes on the Tractability and Efficiency of Sorting Algorithms
International Journal of Engineering Research and Technology. ISSN 0974-3154, Volume 12, Number 2 (2019), pp. 196-203 © International Research Publication House. http://www.irphouse.com Investigating the Effect of Implementation Languages and Large Problem Sizes on the Tractability and Efficiency of Sorting Algorithms Temitayo Matthew Fagbola and Surendra Colin Thakur Department of Information Technology, Durban University of Technology, Durban 4000, South Africa. ORCID: 0000-0001-6631-1002 (Temitayo Fagbola) Abstract [1],[2]. Theoretically, effective sorting of data allows for an efficient and simple searching process to take place. This is Sorting is a data structure operation involving a re-arrangement particularly important as most merge and search algorithms of an unordered set of elements with witnessed real life strictly depend on the correctness and efficiency of sorting applications for load balancing and energy conservation in algorithms [4]. It is important to note that, the rearrangement distributed, grid and cloud computing environments. However, procedure of each sorting algorithm differs and directly impacts the rearrangement procedure often used by sorting algorithms on the execution time and complexity of such algorithm for differs and significantly impacts on their computational varying problem sizes and type emanating from real-world efficiencies and tractability for varying problem sizes. situations [5]. For instance, the operational sorting procedures Currently, which combination of sorting algorithm and of Merge Sort, Quick Sort and Heap Sort follow a divide-and- implementation language is highly tractable and efficient for conquer approach characterized by key comparison, recursion solving large sized-problems remains an open challenge. In this and binary heap’ key reordering requirements, respectively [9]. -

Foundations of Differentially Oblivious Algorithms
Foundations of Differentially Oblivious Algorithms T-H. Hubert Chan Kai-Min Chung Bruce Maggs Elaine Shi August 5, 2020 Abstract It is well-known that a program's memory access pattern can leak information about its input. To thwart such leakage, most existing works adopt the technique of oblivious RAM (ORAM) simulation. Such an obliviousness notion has stimulated much debate. Although ORAM techniques have significantly improved over the past few years, the concrete overheads are arguably still undesirable for real-world systems | part of this overhead is in fact inherent due to a well-known logarithmic ORAM lower bound by Goldreich and Ostrovsky. To make matters worse, when the program's runtime or output length depend on secret inputs, it may be necessary to perform worst-case padding to achieve full obliviousness and thus incur possibly super-linear overheads. Inspired by the elegant notion of differential privacy, we initiate the study of a new notion of access pattern privacy, which we call \(, δ)-differential obliviousness". We separate the notion of (, δ)-differential obliviousness from classical obliviousness by considering several fundamental algorithmic abstractions including sorting small-length keys, merging two sorted lists, and range query data structures (akin to binary search trees). We show that by adopting differential obliv- iousness with reasonable choices of and δ, not only can one circumvent several impossibilities pertaining to full obliviousness, one can also, in several cases, obtain meaningful privacy with little overhead relative to the non-private baselines (i.e., having privacy \almost for free"). On the other hand, we show that for very demanding choices of and δ, the same lower bounds for oblivious algorithms would be preserved for (, δ)-differential obliviousness. -

Counting Sort and Radix Sort
Counting sort and radix sort Nick Smallbone December 11, 2018 Radix sort is the oldest sorting algorithm which is still in general use; it predates the computer. On the left is Herman Hollerith, the inventor of radix sort. In the late 1800s, he built enormous electromechanical machines which used radix sort to tabulate US census data; he set up a company to sell the machines, and the company later became IBM. On the right you can see a 1950s IBM sorting machine running the radix sort algorithm. Radix sort is unlike the sorting algorithms we have seen so far, in that it is not based on comparisons (≤). However, it only works on certain kinds of data – it is mainly used on numerical data, and is often faster than comparison-based sorting algorithms. Before seeing radix sort, we will look at a simpler algorithm, counting sort. 1 Counting sort #1: sorting a list of digits Suppose you want to sort the first 100 digits of π, in ascending order, by hand. How would you do it? 31415926535897932384626433832795028841971693993751058209749445923078164062862089986280348253421170679 Counting sort is one approach to sorting lists of digits. It can be carried out by hand or on a computer. The idea is like this. First we count how many times each digit occurs in the input data (in this case, the first 100 digits of π): Digit 0 1 2 3 4 5 6 7 8 9 Number of occurrences 8 8 12 12 10 8 9 8 12 14 We can compute this table while looking through the input list only once, by keeping a running total for each digit. -

Tutorial 2: Heapsort, Quicksort, Counting Sort, Radix Sort
Tutorial 2: Heapsort, Quicksort, Counting Sort, Radix Sort Mayank Saksena September 20, 2006 1 Heapsort We review Heapsort, and prove some loop invariants for it. For further information, see Chapter 6 of Introduction to Algorithms. HEAPSORT(A) 1 BUILD-MAX-HEAP(A) Ð eÒg Øh A 2 for i = ( ) downto 2 A i 3 swap A[1] and [ ] ×iÞ e A heaÔ ×iÞ e A 4 heaÔ- ( )= - ( ) 1 5 MAX-HEAPIFY(A; 1) BUILD-MAX-HEAP(A) ×iÞ e A Ð eÒg Øh A 1 heaÔ- ( )= ( ) Ð eÒg Øh A = 2 for i = ( ) 2 downto 1 3 MAX-HEAPIFY(A; i) MAX-HEAPIFY(A; i) i 1 Ð =LEFT( ) i 2 Ö =RIGHT( ) heaÔ ×iÞ e A A Ð > A i Ð aÖ g e×Ø Ð 3 if Ð - ( ) and ( ) ( ) then = i 4 else Ð aÖ g e×Ø = heaÔ ×iÞ e A A Ö > A Ð aÖ g e×Ø Ð aÖ g e×Ø Ö 5 if Ö - ( ) and ( ) ( ) then = i 6 if Ð aÖ g e×Ø = i A Ð aÖ g e×Ø 7 swap A[ ] and [ ] 8 MAX-HEAPIFY(A; Ð aÖ g e×Ø) 1 Loop invariants First, assume that MAX-HEAPIFY(A; i) is correct, i.e., that it makes the subtree with A root i a max-heap. Under this assumption, we prove that BUILD-MAX-HEAP( ) is correct, i.e., that it makes A a max-heap. A We show: at the start of iteration i of the for-loop of BUILD-MAX-HEAP( ) (line ; i ;:::;Ò 2), each of the nodes i +1 +2 is the root of a max-heap. -

Sorting Algorithm 1 Sorting Algorithm
Sorting algorithm 1 Sorting algorithm In computer science, a sorting algorithm is an algorithm that puts elements of a list in a certain order. The most-used orders are numerical order and lexicographical order. Efficient sorting is important for optimizing the use of other algorithms (such as search and merge algorithms) that require sorted lists to work correctly; it is also often useful for canonicalizing data and for producing human-readable output. More formally, the output must satisfy two conditions: 1. The output is in nondecreasing order (each element is no smaller than the previous element according to the desired total order); 2. The output is a permutation, or reordering, of the input. Since the dawn of computing, the sorting problem has attracted a great deal of research, perhaps due to the complexity of solving it efficiently despite its simple, familiar statement. For example, bubble sort was analyzed as early as 1956.[1] Although many consider it a solved problem, useful new sorting algorithms are still being invented (for example, library sort was first published in 2004). Sorting algorithms are prevalent in introductory computer science classes, where the abundance of algorithms for the problem provides a gentle introduction to a variety of core algorithm concepts, such as big O notation, divide and conquer algorithms, data structures, randomized algorithms, best, worst and average case analysis, time-space tradeoffs, and lower bounds. Classification Sorting algorithms used in computer science are often classified by: • Computational complexity (worst, average and best behaviour) of element comparisons in terms of the size of the list . For typical sorting algorithms good behavior is and bad behavior is . -
Visvesvaraya Technological University a Project Report
` VISVESVARAYA TECHNOLOGICAL UNIVERSITY “Jnana Sangama”, Belagavi – 590 018 A PROJECT REPORT ON “PREDICTIVE SCHEDULING OF SORTING ALGORITHMS” Submitted in partial fulfillment for the award of the degree of BACHELOR OF ENGINEERING IN COMPUTER SCIENCE AND ENGINEERING BY RANJIT KUMAR SHA (1NH13CS092) SANDIP SHAH (1NH13CS101) SAURABH RAI (1NH13CS104) GAURAV KUMAR (1NH13CS718) Under the guidance of Ms. Sridevi (Senior Assistant Professor, Dept. of CSE, NHCE) DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING NEW HORIZON COLLEGE OF ENGINEERING (ISO-9001:2000 certified, Accredited by NAAC ‘A’, Permanently affiliated to VTU) Outer Ring Road, Panathur Post, Near Marathalli, Bangalore – 560103 ` NEW HORIZON COLLEGE OF ENGINEERING (ISO-9001:2000 certified, Accredited by NAAC ‘A’ Permanently affiliated to VTU) Outer Ring Road, Panathur Post, Near Marathalli, Bangalore-560 103 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING CERTIFICATE Certified that the project work entitled “PREDICTIVE SCHEDULING OF SORTING ALGORITHMS” carried out by RANJIT KUMAR SHA (1NH13CS092), SANDIP SHAH (1NH13CS101), SAURABH RAI (1NH13CS104) and GAURAV KUMAR (1NH13CS718) bonafide students of NEW HORIZON COLLEGE OF ENGINEERING in partial fulfillment for the award of Bachelor of Engineering in Computer Science and Engineering of the Visvesvaraya Technological University, Belagavi during the year 2016-2017. It is certified that all corrections/suggestions indicated for Internal Assessment have been incorporated in the report deposited in the department library. The project report has been approved as it satisfies the academic requirements in respect of Project work prescribed for the Degree. Name & Signature of Guide Name Signature of HOD Signature of Principal (Ms. Sridevi) (Dr. Prashanth C.S.R.) (Dr. Manjunatha) External Viva Name of Examiner Signature with date 1. -

I. Sorting Networks Thomas Sauerwald
I. Sorting Networks Thomas Sauerwald Easter 2015 Outline Outline of this Course Introduction to Sorting Networks Batcher’s Sorting Network Counting Networks I. Sorting Networks Outline of this Course 2 Closely follow the book and use the same numberring of theorems/lemmas etc. I. Sorting Networks (Sorting, Counting, Load Balancing) II. Matrix Multiplication (Serial and Parallel) III. Linear Programming (Formulating, Applying and Solving) IV. Approximation Algorithms: Covering Problems V. Approximation Algorithms via Exact Algorithms VI. Approximation Algorithms: Travelling Salesman Problem VII. Approximation Algorithms: Randomisation and Rounding VIII. Approximation Algorithms: MAX-CUT Problem (Tentative) List of Topics Algorithms (I, II) Complexity Theory Advanced Algorithms I. Sorting Networks Outline of this Course 3 Closely follow the book and use the same numberring of theorems/lemmas etc. (Tentative) List of Topics Algorithms (I, II) Complexity Theory Advanced Algorithms I. Sorting Networks (Sorting, Counting, Load Balancing) II. Matrix Multiplication (Serial and Parallel) III. Linear Programming (Formulating, Applying and Solving) IV. Approximation Algorithms: Covering Problems V. Approximation Algorithms via Exact Algorithms VI. Approximation Algorithms: Travelling Salesman Problem VII. Approximation Algorithms: Randomisation and Rounding VIII. Approximation Algorithms: MAX-CUT Problem I. Sorting Networks Outline of this Course 3 (Tentative) List of Topics Algorithms (I, II) Complexity Theory Advanced Algorithms I. Sorting Networks (Sorting, Counting, Load Balancing) II. Matrix Multiplication (Serial and Parallel) III. Linear Programming (Formulating, Applying and Solving) IV. Approximation Algorithms: Covering Problems V. Approximation Algorithms via Exact Algorithms VI. Approximation Algorithms: Travelling Salesman Problem VII. Approximation Algorithms: Randomisation and Rounding VIII. Approximation Algorithms: MAX-CUT Problem Closely follow the book and use the same numberring of theorems/lemmas etc.