The Symmetric Group, Its Representations, and Combinatorics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Bijective Proofs for Schur Function Identities Which Imply Dodgson's Condensation Formula and Plücker Relations
Bijective proofs for Schur function identities which imply Dodgson’s condensation formula and Pl¨ucker relations Markus Fulmek Institut f¨urMathematik der Universit¨atWien Strudlhofgasse 4, A-1090 Wien, Austria [email protected] Michael Kleber Massachusetts Institute of Technology 77 Massachusetts Avenue, Cambridge, MA 02139, USA [email protected] Submitted: July 3, 2000; Accepted: March 7, 2001. MR Subject Classifications: 05E05 05E15 Abstract We present a “method” for bijective proofs for determinant identities, which is based on translating determinants to Schur functions by the Jacobi–Trudi identity. We illustrate this “method” by generalizing a bijective construction (which was first used by Goulden) to a class of Schur function identities, from which we shall obtain bijective proofs for Dodgson’s condensation formula, Pl¨ucker relations and a recent identity of the second author. 1 Introduction Usually, bijective proofs of determinant identities involve the following steps (cf., e.g, [19, Chapter 4] or [23, 24]): Expansion of the determinant as sum over the symmetric group, • Interpretation of this sum as the generating function of some set of combinatorial • objects which are equipped with some signed weight, Construction of an explicit weight– and sign–preserving bijection between the re- • spective combinatorial objects, maybe supported by the construction of a sign– reversing involution for certain objects. the electronic journal of combinatorics 8 (2001), #R16 1 Here, we will present another “method” of bijective proofs for determinant identitities, which involves the following steps: First, we replace the entries ai;j of the determinants by hλ i+j (where hm denotes i− • the m–th complete homogeneous function), Second, by the Jacobi–Trudi identity we transform the original determinant identity • into an equivalent identity for Schur functions, Third, we obtain a bijective proof for this equivalent identity by using the interpre- • tation of Schur functions in terms of nonintersecting lattice paths. -

On Some Generation Methods of Finite Simple Groups
Introduction Preliminaries Special Kind of Generation of Finite Simple Groups The Bibliography On Some Generation Methods of Finite Simple Groups Ayoub B. M. Basheer Department of Mathematical Sciences, North-West University (Mafikeng), P Bag X2046, Mmabatho 2735, South Africa Groups St Andrews 2017 in Birmingham, School of Mathematics, University of Birmingham, United Kingdom 11th of August 2017 Ayoub Basheer, North-West University, South Africa Groups St Andrews 2017 Talk in Birmingham Introduction Preliminaries Special Kind of Generation of Finite Simple Groups The Bibliography Abstract In this talk we consider some methods of generating finite simple groups with the focus on ranks of classes, (p; q; r)-generation and spread (exact) of finite simple groups. We show some examples of results that were established by the author and his supervisor, Professor J. Moori on generations of some finite simple groups. Ayoub Basheer, North-West University, South Africa Groups St Andrews 2017 Talk in Birmingham Introduction Preliminaries Special Kind of Generation of Finite Simple Groups The Bibliography Introduction Generation of finite groups by suitable subsets is of great interest and has many applications to groups and their representations. For example, Di Martino and et al. [39] established a useful connection between generation of groups by conjugate elements and the existence of elements representable by almost cyclic matrices. Their motivation was to study irreducible projective representations of the sporadic simple groups. In view of applications, it is often important to exhibit generating pairs of some special kind, such as generators carrying a geometric meaning, generators of some prescribed order, generators that offer an economical presentation of the group. -

14.2 Covers of Symmetric and Alternating Groups
Remark 206 In terms of Galois cohomology, there an exact sequence of alge- braic groups (over an algebrically closed field) 1 → GL1 → ΓV → OV → 1 We do not necessarily get an exact sequence when taking values in some subfield. If 1 → A → B → C → 1 is exact, 1 → A(K) → B(K) → C(K) is exact, but the map on the right need not be surjective. Instead what we get is 1 → H0(Gal(K¯ /K), A) → H0(Gal(K¯ /K), B) → H0(Gal(K¯ /K), C) → → H1(Gal(K¯ /K), A) → ··· 1 1 It turns out that H (Gal(K¯ /K), GL1) = 1. However, H (Gal(K¯ /K), ±1) = K×/(K×)2. So from 1 → GL1 → ΓV → OV → 1 we get × 1 1 → K → ΓV (K) → OV (K) → 1 = H (Gal(K¯ /K), GL1) However, taking 1 → µ2 → SpinV → SOV → 1 we get N × × 2 1 ¯ 1 → ±1 → SpinV (K) → SOV (K) −→ K /(K ) = H (K/K, µ2) so the non-surjectivity of N is some kind of higher Galois cohomology. Warning 207 SpinV → SOV is onto as a map of ALGEBRAIC GROUPS, but SpinV (K) → SOV (K) need NOT be onto. Example 208 Take O3(R) =∼ SO3(R)×{±1} as 3 is odd (in general O2n+1(R) =∼ SO2n+1(R) × {±1}). So we have a sequence 1 → ±1 → Spin3(R) → SO3(R) → 1. 0 × Notice that Spin3(R) ⊆ C3 (R) =∼ H, so Spin3(R) ⊆ H , and in fact we saw that it is S3. 14.2 Covers of symmetric and alternating groups The symmetric group on n letter can be embedded in the obvious way in On(R) as permutations of coordinates. -

Representations of the Infinite Symmetric Group
Representations of the infinite symmetric group Alexei Borodin1 Grigori Olshanski2 Version of February 26, 2016 1 Department of Mathematics, Massachusetts Institute of Technology, Cambridge, MA, USA Institute for Information Transmission Problems of the Russian Academy of Sciences, Moscow, Russia 2 Institute for Information Transmission Problems of the Russian Academy of Sciences, Moscow, Russia National Research University Higher School of Economics, Moscow, Russia Contents 0 Introduction 4 I Symmetric functions and Thoma's theorem 12 1 Symmetric group representations 12 Exercises . 19 2 Theory of symmetric functions 20 Exercises . 31 3 Coherent systems on the Young graph 37 The infinite symmetric group and the Young graph . 37 Coherent systems . 39 The Thoma simplex . 41 1 CONTENTS 2 Integral representation of coherent systems and characters . 44 Exercises . 46 4 Extreme characters and Thoma's theorem 47 Thoma's theorem . 47 Multiplicativity . 49 Exercises . 52 5 Pascal graph and de Finetti's theorem 55 Exercises . 60 6 Relative dimension in Y 61 Relative dimension and shifted Schur polynomials . 61 The algebra of shifted symmetric functions . 65 Modified Frobenius coordinates . 66 The embedding Yn ! Ω and asymptotic bounds . 68 Integral representation of coherent systems: proof . 71 The Vershik{Kerov theorem . 74 Exercises . 76 7 Boundaries and Gibbs measures on paths 82 The category B ............................. 82 Projective chains . 83 Graded graphs . 86 Gibbs measures . 88 Examples of path spaces for branching graphs . 91 The Martin boundary and Vershik{Kerov's ergodic theorem . 92 Exercises . 94 II Unitary representations 98 8 Preliminaries and Gelfand pairs 98 Exercises . 108 9 Spherical type representations 111 10 Realization of spherical representations 118 Exercises . -

Math 958–Topics in Discrete Mathematics Spring Semester 2018 TR 09:30–10:45 in Avery Hall (AVH) 351 1 Instructor
Math 958{Topics in Discrete Mathematics Spring Semester 2018 TR 09:30{10:45 in Avery Hall (AVH) 351 1 Instructor Dr. Tri Lai Assistant Professor Department of Mathematics University of Nebraska - Lincoln Lincoln, NE 68588-0130, USA Email: [email protected] Website: http://www.math.unl.edu/$\sim$tlai3/ Office: Avery Hall 339 Office Hours: By Appointment 2 Prerequisites Math 450. 3 Contacting me The best way to contact with me is by email, [email protected]. Please put \[MATH 958]" at the beginning of the title and make sure to include your whole name in your email. Using your official UNL email to contact me is strongly recommended. My office is Avery Hall 339. My office hours are by appoinment. 4 Course Description Bijective Combinatorics is a branch of combinatorics focusing on bijections between mathematical objects. The fact is that there many totally different objects in mathematics that are actually equinumerous, in this case, we always want to seek for a simple bijection between them. For example, the number of ways to divide that a convex (n + 2)-gon into triangles by non-intersecting diagonals is equal to the number of full binary trees with n + 1 leaves. Both objects are counted 1 2n by the well known Catalan number Cn = n+1 n . Do you know that there are more than two hundred (!!) mathematical objects are counted by the Catalan number? In this course, we will go over a number of such \Catalan objects" and investigate the beautiful bijections between them. One more example is the well-known theorem by Euler about integer partitions stating that the number of ways to write a positive integer n as the sum of distinct positive integers is equal to the number of ways to write n as the sum of odd positive integers. -

Finding Direct Partition Bijections by Two-Directional Rewriting Techniques
View metadata, citation and similar papers at core.ac.uk brought to you by CORE provided by Elsevier - Publisher Connector Discrete Mathematics 285 (2004) 151–166 www.elsevier.com/locate/disc Finding direct partition bijections by two-directional rewriting techniques Max Kanovich Department of Computer and Information Science, University of Pennsylvania, 3330 Walnut Street, Philadelphia, PA 19104, USA Received 7 May 2003; received in revised form 27 October 2003; accepted 21 January 2004 Abstract One basic activity in combinatorics is to establish combinatorial identities by so-called ‘bijective proofs,’ which consists in constructing explicit bijections between two types of the combinatorial objects under consideration. We show how such bijective proofs can be established in a systematic way from the ‘lattice properties’ of partition ideals, and how the desired bijections are computed by means of multiset rewriting, for a variety of combinatorial problems involving partitions. In particular, we fully characterizes all equinumerous partition ideals with ‘disjointly supported’ complements. This geometrical characterization is proved to automatically provide the desired bijection between partition ideals but in terms of the minimal elements of the order ÿlters, their complements. As a corollary, a new transparent proof, the ‘bijective’ one, is given for all equinumerous classes of the partition ideals of order 1 from the classical book “The Theory of Partitions” by G.Andrews. Establishing the required bijections involves two-directional reductions technique novel in the sense that forward and backward application of rewrite rules heads, respectively, for two di?erent normal forms (representing the two combinatorial types). It is well-known that non-overlapping multiset rules are con@uent. -

6 Permutation Groups
Arkansas Tech University MATH 4033: Elementary Modern Algebra Dr. Marcel B. Finan 6 Permutation Groups Let S be a nonempty set and M(S) be the collection of all mappings from S into S. In this section, we will emphasize on the collection of all invertible mappings from S into S. The elements of this set will be called permutations because of Theorem 2.4 and the next definition. Definition 6.1 Let S be a nonempty set. A one-to-one mapping from S onto S is called a permutation. Consider the collection of all permutations on S. Then this set is a group with respect to composition. Theorem 6.1 The set of all permutations of a nonempty set S is a group with respect to composition. This group is called the symmetric group on S and will be denoted by Sym(S). Proof. By Theorem 2.4, the set of all permutations on S is just the set I(S) of all invertible mappings from S to S. According to Theorem 4.3, this set is a group with respect to composition. Definition 6.2 A group of permutations , with composition as the operation, is called a permutation group on S. Example 6.1 1. Sym(S) is a permutation group. 2. The collection L of all invertible linear functions from R to R is a permu- tation group with respect to composition.(See Example 4.4.) Note that L is 1 a proper subset of Sym(R) since we can find a function in Sym(R) which is not in L, namely, the function f(x) = x3. -

Quasi P Or Not Quasi P? That Is the Question
Rose-Hulman Undergraduate Mathematics Journal Volume 3 Issue 2 Article 2 Quasi p or not Quasi p? That is the Question Ben Harwood Northern Kentucky University, [email protected] Follow this and additional works at: https://scholar.rose-hulman.edu/rhumj Recommended Citation Harwood, Ben (2002) "Quasi p or not Quasi p? That is the Question," Rose-Hulman Undergraduate Mathematics Journal: Vol. 3 : Iss. 2 , Article 2. Available at: https://scholar.rose-hulman.edu/rhumj/vol3/iss2/2 Quasi p- or not quasi p-? That is the Question.* By Ben Harwood Department of Mathematics and Computer Science Northern Kentucky University Highland Heights, KY 41099 e-mail: [email protected] Section Zero: Introduction The question might not be as profound as Shakespeare’s, but nevertheless, it is interesting. Because few people seem to be aware of quasi p-groups, we will begin with a bit of history and a definition; and then we will determine for each group of order less than 24 (and a few others) whether the group is a quasi p-group for some prime p or not. This paper is a prequel to [Hwd]. In [Hwd] we prove that (Z3 £Z3)oZ2 and Z5 o Z4 are quasi 2-groups. Those proofs now form a portion of Proposition (12.1) It should also be noted that [Hwd] may also be found in this journal. Section One: Why should we be interested in quasi p-groups? In a 1957 paper titled Coverings of algebraic curves [Abh2], Abhyankar conjectured that the algebraic fundamental group of the affine line over an algebraically closed field k of prime characteristic p is the set of quasi p-groups, where by the algebraic fundamental group of the affine line he meant the family of all Galois groups Gal(L=k(X)) as L varies over all finite normal extensions of k(X) the function field of the affine line such that no point of the line is ramified in L, and where by a quasi p-group he meant a finite group that is generated by all of its p-Sylow subgroups. -
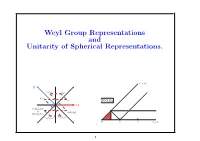
Weyl Group Representations and Unitarity of Spherical Representations
Weyl Group Representations and Unitarity of Spherical Representations. Alessandra Pantano, University of California, Irvine Windsor, October 23, 2008 ν1 = ν2 β S S ν α β Sβν Sαν ν SO(3,2) 0 α SαSβSαSβν = SβSαSβν SβSαSβSαν S S SαSβSαν β αν 0 1 2 ν = 0 [type B2] 2 1 0: Introduction Spherical unitary dual of real split semisimple Lie groups spherical equivalence classes of unitary-dual = irreducible unitary = ? of G spherical repr.s of G aim of the talk Show how to compute this set using the Weyl group 2 0: Introduction Plan of the talk ² Preliminary notions: root system of a split real Lie group ² De¯ne the unitary dual ² Examples (¯nite and compact groups) ² Spherical unitary dual of non-compact groups ² Petite K-types ² Real and p-adic groups: a comparison of unitary duals ² The example of Sp(4) ² Conclusions 3 1: Preliminary Notions Lie groups Lie Groups A Lie group G is a group with a smooth manifold structure, such that the product and the inversion are smooth maps Examples: ² the symmetryc group Sn=fbijections on f1; 2; : : : ; ngg à finite ² the unit circle S1 = fz 2 C: kzk = 1g à compact ² SL(2; R)=fA 2 M(2; R): det A = 1g à non-compact 4 1: Preliminary Notions Root systems Root Systems Let V ' Rn and let h; i be an inner product on V . If v 2 V -f0g, let hv;wi σv : w 7! w ¡ 2 hv;vi v be the reflection through the plane perpendicular to v. A root system for V is a ¯nite subset R of V such that ² R spans V , and 0 2= R ² if ® 2 R, then §® are the only multiples of ® in R h®;¯i ² if ®; ¯ 2 R, then 2 h®;®i 2 Z ² if ®; ¯ 2 R, then σ®(¯) 2 R A1xA1 A2 B2 C2 G2 5 1: Preliminary Notions Root systems Simple roots Let V be an n-dim.l vector space and let R be a root system for V . -

13. Symmetric Groups
13. Symmetric groups 13.1 Cycles, disjoint cycle decompositions 13.2 Adjacent transpositions 13.3 Worked examples 1. Cycles, disjoint cycle decompositions The symmetric group Sn is the group of bijections of f1; : : : ; ng to itself, also called permutations of n things. A standard notation for the permutation that sends i −! `i is 1 2 3 : : : n `1 `2 `3 : : : `n Under composition of mappings, the permutations of f1; : : : ; ng is a group. The fixed points of a permutation f are the elements i 2 f1; 2; : : : ; ng such that f(i) = i. A k-cycle is a permutation of the form f(`1) = `2 f(`2) = `3 : : : f(`k−1) = `k and f(`k) = `1 for distinct `1; : : : ; `k among f1; : : : ; ng, and f(i) = i for i not among the `j. There is standard notation for this cycle: (`1 `2 `3 : : : `k) Note that the same cycle can be written several ways, by cyclically permuting the `j: for example, it also can be written as (`2 `3 : : : `k `1) or (`3 `4 : : : `k `1 `2) Two cycles are disjoint when the respective sets of indices properly moved are disjoint. That is, cycles 0 0 0 0 0 0 0 (`1 `2 `3 : : : `k) and (`1 `2 `3 : : : `k0 ) are disjoint when the sets f`1; `2; : : : ; `kg and f`1; `2; : : : ; `k0 g are disjoint. [1.0.1] Theorem: Every permutation is uniquely expressible as a product of disjoint cycles. 191 192 Symmetric groups Proof: Given g 2 Sn, the cyclic subgroup hgi ⊂ Sn generated by g acts on the set X = f1; : : : ; ng and decomposes X into disjoint orbits i Ox = fg x : i 2 Zg for choices of orbit representatives x 2 X. -

Linear Algebraic Groups
Clay Mathematics Proceedings Volume 4, 2005 Linear Algebraic Groups Fiona Murnaghan Abstract. We give a summary, without proofs, of basic properties of linear algebraic groups, with particular emphasis on reductive algebraic groups. 1. Algebraic groups Let K be an algebraically closed field. An algebraic K-group G is an algebraic variety over K, and a group, such that the maps µ : G × G → G, µ(x, y) = xy, and ι : G → G, ι(x)= x−1, are morphisms of algebraic varieties. For convenience, in these notes, we will fix K and refer to an algebraic K-group as an algebraic group. If the variety G is affine, that is, G is an algebraic set (a Zariski-closed set) in Kn for some natural number n, we say that G is a linear algebraic group. If G and G′ are algebraic groups, a map ϕ : G → G′ is a homomorphism of algebraic groups if ϕ is a morphism of varieties and a group homomorphism. Similarly, ϕ is an isomorphism of algebraic groups if ϕ is an isomorphism of varieties and a group isomorphism. A closed subgroup of an algebraic group is an algebraic group. If H is a closed subgroup of a linear algebraic group G, then G/H can be made into a quasi- projective variety (a variety which is a locally closed subset of some projective space). If H is normal in G, then G/H (with the usual group structure) is a linear algebraic group. Let ϕ : G → G′ be a homomorphism of algebraic groups. Then the kernel of ϕ is a closed subgroup of G and the image of ϕ is a closed subgroup of G. -
Rational Catalan Combinatorics 1
Rational Catalan Combinatorics Drew Armstrong et al. University of Miami www.math.miami.edu/∼armstrong March 18, 2012 This talk will advertise a definition. Here is it. Definition Let x be a positive rational number written as x = a=(b − a) for 0 < a < b coprime. Then we define the Catalan number 1 a + b (a + b − 1)! Cat(x) := = : a + b a; b a!b! !!! Please note the a; b-symmetry. This talk will advertise a definition. Here is it. Definition Let x be a positive rational number written as x = a=(b − a) for 0 < a < b coprime. Then we define the Catalan number 1 a + b (a + b − 1)! Cat(x) := = : a + b a; b a!b! !!! Please note the a; b-symmetry. This talk will advertise a definition. Here is it. Definition Let x be a positive rational number written as x = a=(b − a) for 0 < a < b coprime. Then we define the Catalan number 1 a + b (a + b − 1)! Cat(x) := = : a + b a; b a!b! !!! Please note the a; b-symmetry. Special cases. When b = 1 mod a ::: I Eug`eneCharles Catalan (1814-1894) (a < b) = (n < n + 1) gives the good old Catalan number n 1 2n + 1 Cat(n) = Cat = : 1 2n + 1 n I Nicolaus Fuss (1755-1826) (a < b) = (n < kn + 1) gives the Fuss-Catalan number n 1 (k + 1)n + 1 Cat = : (kn + 1) − n (k + 1)n + 1 n Special cases. When b = 1 mod a ::: I Eug`eneCharles Catalan (1814-1894) (a < b) = (n < n + 1) gives the good old Catalan number n 1 2n + 1 Cat(n) = Cat = : 1 2n + 1 n I Nicolaus Fuss (1755-1826) (a < b) = (n < kn + 1) gives the Fuss-Catalan number n 1 (k + 1)n + 1 Cat = : (kn + 1) − n (k + 1)n + 1 n Special cases.