Integrating Scientific Knowledge with Machine Learning for Engineering and Environmental Systems
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Foundations of Computational Science August 29-30, 2019
Foundations of Computational Science August 29-30, 2019 Thursday, August 29 Time Speaker Title/Abstract 8:30 - 9:30am Breakfast 9:30 - 9:40am Opening Explainable AI and Multimedia Research Abstract: AI as a concept has been around since the 1950’s. With the recent advancements in machine learning algorithms, and the availability of big data and large computing resources, the scene is set for AI to be used in many more systems and applications which will profoundly impact society. The current deep learning based AI systems are mostly in black box form and are often non-explainable. Though it has high performance, it is also known to make occasional fatal mistakes. 9:30 - 10:05am Tat Seng Chua This has limited the applications of AI, especially in mission critical applications. In this talk, I will present the current state-of-the arts in explainable AI, which holds promise to helping humans better understand and interpret the decisions made by the black-box AI models. This is followed by our preliminary research on explainable recommendation, relation inference in videos, as well as leveraging prior domain knowledge, information theoretic principles, and adversarial algorithms to achieving explainable framework. I will also discuss future research towards quality, fairness and robustness of explainable AI. Group Photo and 10:05 - 10:35am Coffee Break Deep Learning-based Chinese Language Computation at Tsinghua University: 10:35 - 10:50am Maosong Sun Progress and Challenges 10:50 - 11:05am Minlie Huang Controllable Text Generation 11:05 - 11:20am Peng Cui Stable Learning: The Convergence of Causal Inference and Machine Learning 11:20 - 11:45am Yike Guo Data Efficiency in Machine Learning Deep Approximation via Deep Learning Abstract: The primary task of many applications is approximating/estimating a function through samples drawn from a probability distribution on the input space. -

Computational Science and Engineering
Computational Science and Engineering, PhD College of Engineering Graduate Coordinator: TBA Email: Phone: Department Chair: Marwan Bikdash Email: [email protected] Phone: 336-334-7437 The PhD in Computational Science and Engineering (CSE) is an interdisciplinary graduate program designed for students who seek to use advanced computational methods to solve large problems in diverse fields ranging from the basic sciences (physics, chemistry, mathematics, etc.) to sociology, biology, engineering, and economics. The mission of Computational Science and Engineering is to graduate professionals who (a) have expertise in developing novel computational methodologies and products, and/or (b) have extended their expertise in specific disciplines (in science, technology, engineering, and socioeconomics) with computational tools. The Ph.D. program is designed for students with graduate and undergraduate degrees in a variety of fields including engineering, chemistry, physics, mathematics, computer science, and economics who will be trained to develop problem-solving methodologies and computational tools for solving challenging problems. Research in Computational Science and Engineering includes: computational system theory, big data and computational statistics, high-performance computing and scientific visualization, multi-scale and multi-physics modeling, computational solid, fluid and nonlinear dynamics, computational geometry, fast and scalable algorithms, computational civil engineering, bioinformatics and computational biology, and computational physics. Additional Admission Requirements Master of Science or Engineering degree in Computational Science and Engineering (CSE) or in science, engineering, business, economics, technology or in a field allied to computational science or computational engineering field. GRE scores Program Outcomes: Students will demonstrate critical thinking and ability in conducting research in engineering, science and mathematics through computational modeling and simulations. -
Artificial Intelligence Research For
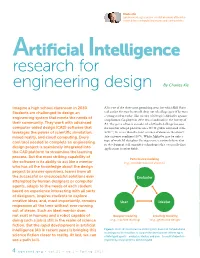
Charles Xie ([email protected]) is a senior scientist who works at the inter- section between computational science and learning science. Artificial Intelligence research for engineering design By Charles Xie Imagine a high school classroom in 2030. AI is one of the three most promising areas for which Bill Gates Students are challenged to design an said earlier this year he would drop out of college again if he were a young student today. The victory of Google’s AlphaGo against engineering system that meets the needs of a top human Go player in 2016 was a landmark in the history of their community. They work with advanced AI. The game of Go is considered a difficult challenge because computer-aided design (CAD) software that the number of legal positions on a 19×19 grid is estimated to be leverages the power of scientific simulation, 2×10170, far more than the total number of atoms in the observ- mixed reality, and cloud computing. Every able universe combined (1082). While AlphaGo may be only a cool tool needed to complete an engineering type of weak AI that plays Go at present, scientists believe that its development will engender technologies that eventually find design project is seamlessly integrated into applications in other fields. the CAD platform to streamline the learning process. But the most striking capability of Performance modeling the software is its ability to act like a mentor (e.g., simulation-based analysis) who has all the knowledge about the design project to answer questions, learns from all the successful or unsuccessful solutions ever Evaluator attempted by human designers or computer agents, adapts to the needs of each student based on experience interacting with all sorts of designers, inspires students to explore creative ideas, and, most importantly, remains User Ideator responsive all the time without ever running out of steam. -

The Principled Design of Large-Scale Recursive Neural Network Architectures–DAG-Rnns and the Protein Structure Prediction Problem
Journal of Machine Learning Research 4 (2003) 575-602 Submitted 2/02; Revised 4/03; Published 9/03 The Principled Design of Large-Scale Recursive Neural Network Architectures–DAG-RNNs and the Protein Structure Prediction Problem Pierre Baldi [email protected] Gianluca Pollastri [email protected] School of Information and Computer Science Institute for Genomics and Bioinformatics University of California, Irvine Irvine, CA 92697-3425, USA Editor: Michael I. Jordan Abstract We describe a general methodology for the design of large-scale recursive neural network architec- tures (DAG-RNNs) which comprises three fundamental steps: (1) representation of a given domain using suitable directed acyclic graphs (DAGs) to connect visible and hidden node variables; (2) parameterization of the relationship between each variable and its parent variables by feedforward neural networks; and (3) application of weight-sharing within appropriate subsets of DAG connec- tions to capture stationarity and control model complexity. Here we use these principles to derive several specific classes of DAG-RNN architectures based on lattices, trees, and other structured graphs. These architectures can process a wide range of data structures with variable sizes and dimensions. While the overall resulting models remain probabilistic, the internal deterministic dy- namics allows efficient propagation of information, as well as training by gradient descent, in order to tackle large-scale problems. These methods are used here to derive state-of-the-art predictors for protein structural features such as secondary structure (1D) and both fine- and coarse-grained contact maps (2D). Extensions, relationships to graphical models, and implications for the design of neural architectures are briefly discussed. -

Full Academic Cv: Grigori Fursin, Phd
FULL ACADEMIC CV: GRIGORI FURSIN, PHD Current position VP of MLOps at OctoML.ai (USA) Languages English (British citizen); French (spoken, intermediate); Russian (native) Address Paris region, France Education PhD in computer science with the ORS award from the University of Edinburgh (2004) Website cKnowledge.io/@gfursin LinkedIn linkedin.com/in/grigorifursin Publications scholar.google.com/citations?user=IwcnpkwAAAAJ (H‐index: 25) Personal e‐mail [email protected] I am a computer scientist, engineer, educator and business executive with an interdisciplinary background in computer engineering, machine learning, physics and electronics. I am passionate about designing efficient systems in terms of speed, energy, accuracy and various costs, bringing deep tech to the real world, teaching, enabling reproducible research and sup‐ porting open science. MY ACADEMIC RESEARCH (TENURED RESEARCH SCIENTIST AT INRIA WITH PHD IN CS FROM THE UNIVERSITY OF EDINBURGH) • I was among the first researchers to combine machine learning, autotuning and knowledge sharing to automate and accelerate the development of efficient software and hardware by several orders of magnitudeGoogle ( scholar); • developed open‐source tools and started educational initiatives (ACM, Raspberry Pi foundation) to bring this research to the real world (see use cases); • prepared and tought M.S. course at Paris‐Saclay University on using ML to co‐design efficient software and hardare (self‐optimizing computing systems); • gave 100+ invited research talks; • honored to receive the -

Methodology for Predicting Semantic Annotations of Protein Sequences by Feature Extraction Derived of Statistical Contact Potentials and Continuous Wavelet Transform
Universidad Nacional de Colombia Sede Manizales Master’s Thesis Methodology for predicting semantic annotations of protein sequences by feature extraction derived of statistical contact potentials and continuous wavelet transform Author: Supervisor: Gustavo Alonso Arango Dr. Cesar German Argoty Castellanos Dominguez A thesis submitted in fulfillment of the requirements for the degree of Master’s on Engineering - Industrial Automation in the Department of Electronic, Electric Engineering and Computation Signal Processing and Recognition Group June 2014 Universidad Nacional de Colombia Sede Manizales Tesis de Maestr´ıa Metodolog´ıapara predecir la anotaci´on sem´antica de prote´ınaspor medio de extracci´on de caracter´ısticas derivadas de potenciales de contacto y transformada wavelet continua Autor: Tutor: Gustavo Alonso Arango Dr. Cesar German Argoty Castellanos Dominguez Tesis presentada en cumplimiento a los requerimientos necesarios para obtener el grado de Maestr´ıaen Ingenier´ıaen Automatizaci´onIndustrial en el Departamento de Ingenier´ıaEl´ectrica,Electr´onicay Computaci´on Grupo de Procesamiento Digital de Senales Enero 2014 UNIVERSIDAD NACIONAL DE COLOMBIA Abstract Faculty of Engineering and Architecture Department of Electronic, Electric Engineering and Computation Master’s on Engineering - Industrial Automation Methodology for predicting semantic annotations of protein sequences by feature extraction derived of statistical contact potentials and continuous wavelet transform by Gustavo Alonso Arango Argoty In this thesis, a method to predict semantic annotations of the proteins from its primary structure is proposed. The main contribution of this thesis lies in the implementation of a novel protein feature representation, which makes use of the pairwise statistical contact potentials describing the protein interactions and geometry at the atomic level. -

Delivering a Machine Learning Course on HPC Resources
Delivering a machine learning course on HPC resources Stefano Bagnasco, Federica Legger, Sara Vallero This project has received funding from the European Union’s Horizon 2020 research and innovation programme under the Marie Skłodowska-Curie grant agreement LHCBIGDATA No 799062 The course ● Title: Big Data Science and Machine Learning ● Graduate Program in Physics at University of Torino ● Academic year 2018-2019: ○ Starts in 2 weeks ○ 2 CFU, 10 hours (theory+hands-on) ○ 7 registered students ● Academic year 2019-2020: ○ March 2020 ○ 4 CFU, 16 hours (theory+hands-on) ○ Already 2 registered students 2 The Program ● Introduction to big data science ○ The big data pipeline: state-of-the-art tools and technologies ● ML and DL methods: ○ supervised and unsupervised models, ○ neural networks ● Introduction to computer architecture and parallel computing patterns ○ Initiation to OpenMP and MPI (2019-2020) ● Parallelisation of ML algorithms on distributed resources ○ ML applications on distributed architectures ○ Beyond CPUs: GPUs, FPGAs (2019-2020) 3 The aim ● Applied ML course: ○ Many courses on advanced statistical methods available elsewhere ○ Focus on hands-on sessions ● Students will ○ Familiarise with: ■ ML methods and libraries ■ Analysis tools ■ Collaborative models ■ Container and cloud technologies ○ Learn how to ■ Optimise ML models ■ Tune distributed training ■ Work with available resources 4 Hands-on ● Python with Jupyter notebooks ● Prerequisites: some familiarity with numpy and pandas ● ML libraries ○ Day 2: MLlib ■ Gradient Boosting Trees GBT ■ Multilayer Perceptron Classifier MCP ○ Day 3: Keras ■ Sequential model ○ Day 4: bigDL ■ Sequential model ● Coming: ○ CUDA ○ MPI ○ OpenMP 5 ML Input Dataset for hands on ● Open HEP dataset @UCI, 7GB (.csv) ● Signal (heavy Higgs) + background ● 10M MC events (balanced, 50%:50%) ○ 21 low level features ■ pt’s, angles, MET, b-tag, … Signal ○ 7 high level features ■ Invariant masses (m(jj), m(jjj), …) Background: ttbar Baldi, Sadowski, and Whiteson. -

An Evaluation of Tensorflow As a Programming Framework for HPC Applications
DEGREE PROJECT IN COMPUTER SCIENCE AND ENGINEERING, SECOND CYCLE, 30 CREDITS STOCKHOLM, SWEDEN 2018 An Evaluation of TensorFlow as a Programming Framework for HPC Applications WEI DER CHIEN KTH ROYAL INSTITUTE OF TECHNOLOGY SCHOOL OF ELECTRICAL ENGINEERING AND COMPUTER SCIENCE An Evaluation of TensorFlow as a Programming Framework for HPC Applications WEI DER CHIEN Master in Computer Science Date: August 28, 2018 Supervisor: Stefano Markidis Examiner: Erwin Laure Swedish title: En undersökning av TensorFlow som ett utvecklingsramverk för högpresterande datorsystem School of Electrical Engineering and Computer Science iii Abstract In recent years, deep-learning, a branch of machine learning gained increasing popularity due to their extensive applications and perfor- mance. At the core of these application is dense matrix-matrix multipli- cation. Graphics Processing Units (GPUs) are commonly used in the training process due to their massively parallel computation capabili- ties. In addition, specialized low-precision accelerators have emerged to specifically address Tensor operations. Software frameworks, such as TensorFlow have also emerged to increase the expressiveness of neural network model development. In TensorFlow computation problems are expressed as Computation Graphs where nodes of a graph denote operation and edges denote data movement between operations. With increasing number of heterogeneous accelerators which might co-exist on the same cluster system, it became increasingly difficult for users to program efficient and scalable applications. TensorFlow provides a high level of abstraction and it is possible to place operations of a computation graph on a device easily through a high level API. In this work, the usability of TensorFlow as a programming framework for HPC application is reviewed. -

Deep Learning in Chemoinformatics Using Tensor Flow
UC Irvine UC Irvine Electronic Theses and Dissertations Title Deep Learning in Chemoinformatics using Tensor Flow Permalink https://escholarship.org/uc/item/963505w5 Author Jain, Akshay Publication Date 2017 Peer reviewed|Thesis/dissertation eScholarship.org Powered by the California Digital Library University of California UNIVERSITY OF CALIFORNIA, IRVINE Deep Learning in Chemoinformatics using Tensor Flow THESIS submitted in partial satisfaction of the requirements for the degree of MASTER OF SCIENCE in Computer Science by Akshay Jain Thesis Committee: Professor Pierre Baldi, Chair Professor Cristina Videira Lopes Professor Eric Mjolsness 2017 c 2017 Akshay Jain DEDICATION To my family and friends. ii TABLE OF CONTENTS Page LIST OF FIGURES v LIST OF TABLES vi ACKNOWLEDGMENTS vii ABSTRACT OF THE THESIS viii 1 Introduction 1 1.1 QSAR Prediction Methods . .2 1.2 Deep Learning . .4 2 Artificial Neural Networks(ANN) 5 2.1 Artificial Neuron . .5 2.2 Activation Function . .7 2.3 Loss function . .8 2.4 Optimization . .8 3 Deep Recursive Architectures 10 3.1 Recurrent Neural Networks (RNN) . 10 3.2 Recursive Neural Networks . 11 3.3 Directed Acyclic Graph Recursive Neural Networks (DAG-RNN) . 11 4 UG-RNN for small molecules 14 4.1 DAG Generation . 16 4.2 Local Information Vector . 16 4.3 Contextual Vectors . 17 4.4 Activity Prediction . 17 4.5 UG-RNN With Contracted Rings (UG-RNN-CR) . 18 4.6 Example: UG-RNN Model of Propionic Acid . 20 5 Implementation 24 6 Data & Results 26 6.1 Aqueous Solubility Prediction . 26 6.2 Melting Point Prediction . 28 iii 7 Conclusions 30 Bibliography 32 A Source Code 37 A.1 UGRNN . -

Interpreting Zheng Chenggong: the Politics of Dramatizing
, - 'I ., . UN1VERSIlY OF HAWAII UBRARY 3~31 INTERPRETING ZHENG CHENGGONG: THE POLITICS OF DRAMATIZING A HISTORICAL FIGURE IN JAPAN, CHINA, AND TAIWAN (1700-1963) A THESIS SUBMITTED TO THE GRADUATE DIVISION OF THE UNIVERSITY OF HAW AI'I IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER OF ARTS IN THEATRE AUGUST 2007 By Chong Wang Thesis Committee: Julie A. Iezzi, Chairperson Lurana D. O'Malley Elizabeth Wichmann-Walczak · - ii .' --, L-' ~ J HAWN CB5 \ .H3 \ no. YI,\ © Copyright 2007 By Chong Wang We certity that we have read this thesis and that, in our opinion, it is satisfactory in scope and quality as a thesis for the degree of Master of Arts in Theatre. TIIESIS COMMITTEE Chairperson iii ACKNOWLEDGEMENTS I want to give my wannest thanks to my family for their strong support. I also want to give my since're thanks to Dr. Julie Iezzi for her careful guidance and tremendous patience during each stage of the writing process. Finally, I want to thank my proofreaders, Takenouchi Kaori and Vance McCoy, without whom this thesis could not have been completed. - . iv ABSTRACT Zheng Chenggong (1624 - 1662) was sired by Chinese merchant-pirate in Hirado, Nagasaki Prefecture, Japan. A general at the end of the Chinese Ming Dynasty, he was a prominent leader of the movement opposing the Manchu Qing Dynasty, and in recovering Taiwan from Dutch colonial occupation in 1661. Honored as a hero in Japan, China, and Taiwan, he has been dramatized in many plays in various theatre forms in Japan (since about 1700), China (since 1906), and Taiwan (since the 1920s). -

Course Outline
Department of Computer Science and Software Engineering COMP 6811 Bioinformatics Algorithms (Reading Course) Fall 2019 Section AA Instructor: Gregory Butler Curriculum Description COMP 6811 Bioinformatics Algorithms (4 credits) The principal objectives of the course are to cover the major algorithms used in bioinformatics; sequence alignment, multiple sequence alignment, phylogeny; classi- fying patterns in sequences; secondary structure prediction; 3D structure prediction; analysis of gene expression data. This includes dynamic programming, machine learning, simulated annealing, and clustering algorithms. Algorithmic principles will be emphasized. A project is required. Outline of Topics The course will focus on algorithms for protein sequence analysis. It will not cover genome assembly, genome mapping, or gene recognition. • Background in Biology and Genomics • Sequence Alignment: Pairwise and Multiple • Representation of Protein Amino Acid Composition • Profile Hidden Markov Models • Specificity Determining Sites • Curation, Annotation, and Ontologies • Machine Learning: Secondary Structure, Signals, Subcellular Location • Protein Families, Phylogenomics, and Orthologous Groups • Profile-Based Alignments • Algorithms Based on k-mers 1 Texts | in Library D. Higgins and W. Taylor (editors). Bioinformatics: Sequence, Structure and Databanks, Oxford University Press, 2000. A. D. Baxevanis and B. F. F. Ouelette. Bioinformatics: A Practical Guide to the Analysis of Genes and Proteins, Wiley, 1998. Richard Durbin, Sean R. Eddy, Anders Krogh, -
B.Sc Computer Science with Specialization in Artificial Intelligence & Machine Learning
B.Sc Computer Science with Specialization in Artificial Intelligence & Machine Learning Curriculum & Syllabus (Based on Choice Based Credit System) Effective from the Academic year 2020-2021 PROGRAMME EDUCATIONAL OBJECTIVES (PEO) PEO 1 : Graduates will have solid basics in Mathematics, Programming, Machine Learning, Artificial Intelligence fundamentals and advancements to solve technical problems. PEO 2 : Graduates will have the capability to apply their knowledge and skills acquired to solve the issues in real world Artificial Intelligence and Machine learning areas and to develop feasible and reliable systems. PEO 3 : Graduates will have the potential to participate in life-long learning through the successful completion of advanced degrees, continuing education, certifications and/or other professional developments. PEO 4 : Graduates will have the ability to apply the gained knowledge to improve the society ensuring ethical and moral values. PEO 5 : Graduates will have exposure to emerging cutting edge technologies and excellent training in the field of Artificial Intelligence & Machine learning PROGRAMME OUTCOMES (PO) PO 1 : Develop knowledge in the field of AI & ML courses necessary to qualify for the degree. PO 2 : Acquire a rich basket of value added courses and soft skill courses instilling self-confidence and moral values. PO 3 : Develop problem solving, decision making and communication skills. PO 4 : Demonstrate social responsibility through Ethics and values and Environmental Studies related activities in the campus and in the society. PO 5 : Strengthen the critical thinking skills and develop professionalism with the state of art ICT facilities. PO 6 : Quality for higher education, government services, industry needs and start up units through continuous practice of preparatory examinations.