Open Source Software for Parallel Workflows in Computational Engineering
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Meshing for the Finite Element Method
Meshing for the Finite Element Method Summer Seminar ISC5939 .......... John Burkardt Department of Scientific Computing Florida State University http://people.sc.fsu.edu/∼jburkardt/presentations/. mesh 2012 fsu.pdf 10/12 July 2012 1 / 119 FEM Meshing Meshing Computer Representations The Delaunay Triangulation TRIANGLE DISTMESH MESH2D Files and Graphics 1 2 2 D Problems 3D Problems Conclusion 2 / 119 MESHING: The finite element method begins by looking at a complicated region, and thinking of it as a mesh of smaller, simpler subregions. The subregions are simple, (perhaps triangles) so we understand their geometry; they are small because when we approximate the differential equations, our errors will be related to the size of the subregions. More, smaller subregions usually mean less total error. After we compute our solution, it is described in terms of the mesh. The simplest description uses piecewise linear functions, which we might expect to be a crude approximation. However, excellent results can be obtained as long as the mesh is small enough in places where the solution changes rapidly. 3 / 119 MESHING: Thus, even though the hard part of the finite element method involves considering abstract approximation spaces, sequences of approximating functions, the issue of boundary conditions, weak forms and so on, ...it all starts with a very simple idea: Given a geometric shape, break it into smaller, simpler shapes; fit the boundary, and be small in some places. Since this is such a simple idea, you might think there's no reason to worry about it much! 4 / 119 MESHING: Indeed, if we start by thinking of a 1D problem, such as modeling the temperature along a thin strand of wire that extends from A to B, our meshing problem is trivial: Choose N, the number of subregions or elements; Insert N-1 equally spaced nodes between A and B; Create N elements, the intervals between successive nodes. -

Advanced Molecular Dynamics in Openfoam✩ S.M
Computer Physics Communications 224 (2018) 1–21 Contents lists available at ScienceDirect Computer Physics Communications journal homepage: www.elsevier.com/locate/cpc Feature article mdFoam+: Advanced molecular dynamics in OpenFOAMI S.M. Longshaw a,*, M.K. Borg b, S.B. Ramisetti b, J. Zhang b, D.A. Lockerby c, D.R. Emerson a, J.M. Reese b a Scientific Computing Department, The Science & Technology Facilities Council, Daresbury Laboratory, Warrington, Cheshire WA4 4AD, UK b School of Engineering, University of Edinburgh, Edinburgh EH9 3FB, UK c School of Engineering, University of Warwick, Coventry, CV4 7AL, UK article info a b s t r a c t Article history: This paper introduces mdFoam+, which is an MPI parallelised molecular dynamics (MD) solver imple- Received 6 March 2017 mented entirely within the OpenFOAM software framework. It is open-source and released under the Received in revised form 17 August 2017 same GNU General Public License (GPL) as OpenFOAM. The source code is released as a publicly open Accepted 25 September 2017 software repository that includes detailed documentation and tutorial cases. Since mdFoam+ is designed Available online 23 October 2017 entirely within the OpenFOAM C++ object-oriented framework, it inherits a number of key features. The Keywords: code is designed for extensibility and flexibility, so it is aimed first and foremost as an MD research tool, OpenFOAM in which new models and test cases can be developed and tested rapidly. Implementing mdFoam+ in Molecular dynamics OpenFOAM also enables easier development of hybrid methods that couple MD with continuum-based MD solvers. Setting up MD cases follows the standard OpenFOAM format, as mdFoam+ also relies upon Computational fluid dynamics the OpenFOAM dictionary-based directory structure. -

Introduction to Nuclear Reactor Modelling Using Openfoam Carlo Fiorina 2
Introduction to nuclear reactor modelling using OpenFOAM Carlo Fiorina 2 Disclaimer C. Fiorina ▪ Focus on the use of OpenFOAM for multiphysics ○ Use of OpenFOAM as CFD tool widely covered by documentation, forums, courses, etc. ▪ Focus on already existing tool (GeN-Foam) as an example ○ Programming from scratch is not that difficult, but unsuited for a 75 minutes lecture ▪ In the slides, more material than can actually be covered in this lecture ○ Can help better understanding the slides after the lecture 3 Content C. Fiorina ▪ General Introduction ▪ Introduction to the use of OpenFOAM ▪ Basics of GeN-Foam ▪ Short introduction on the use of GeN-Foam 4 Objective C. Fiorina What is it about? ▪ Provide you with general information, references, suggestions, terminology and lessons learnt that can facilitate your approach to the OpenFOAM world ▪ Provide with slides that can help you out orienting yourself if you decide to embrace the use of OpenFOAM What is not about? ▪ Detailed course on the use of OpenFOAM ▪ Hands-on training 5 The IAEA-facilitated ONCORE initiative C. Fiorina ONCORE to support the open-source nuclear community and help addressing typical shortcomings of open-source development (scattered community, documentation, QA, loss of knowledge) ▪ Promote collaboration and facilitate communication (connect the community) ▪ Provide guidelines for code contribution (documentation, QA) ▪ Provide development best practices (QA) ▪ Preserve knowledge ○ Incl. compiling a list of open-source codes https://www.iaea.org/topics/nuclear-power-reactors/open-source-nuclear-cod e-for-reactor-analysis-oncore 6 A first important outcome: list of C. Fiorina available codes ▪ https://nucleus.iaea.org/sites/oncore/SitePages/List%20of%20Codes.aspx ▪ A vibrant community with an impressive R&D output ▪ ~35 codes already identified so far: ○ OpenMC ○ Raven ○ Dragon ○ MOOSE ○ Salome platform (Code_Saturne, Code_Aster) ○ TrioCFD ○ … ○ Several OpenFOAM-based tools 7 A central tool for open-source simulation C. -
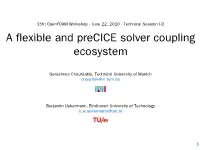
15Th Openfoam Workshop - June 22, 2020 - Technical Session I-D a Flexible and Precice Solver Coupling Ecosystem
15th OpenFOAM Workshop - June 22, 2020 - Technical Session I-D A flexible and preCICE solver coupling ecosystem Gerasimos Chourdakis, Technical University of Munich [email protected] Benjamin Uekermann, Eindhoven University of Technology [email protected] Find these slides on GitHub https://github.com/MakisH/ofw15-slides The Big Picture e r ic r te c e p e lv a r o d p s a lib structure fluid solver solver The Big Picture e r ic r te c e p e lv a r o d p s a lib structure fluid solver solver in-house commercial solver solver The Big Picture e r ic r te c e p e lv a r o d p s a lib structure fluid solver solver OpenFOAM CalculiX SU2 Code_Aster foam-extend FEniCS deal-ii Nutils MBDyn in-house commercial solver solver API in: C++ Python Matlab ANSYS Fluent C Fortran COMSOL The Big Picture e r ic r te c e p e lv a r o d p s a lib structure fluid solver A Coupling Library for Partitioned Multi-Physics Simulations solver OpenFOAM CalculiX SU2 Code_Aster . foam-extend FEniCS deal-ii . Nutils MBDyn communication data mapping in-house commercial solver solver coupling schemes time interpolation API in: C++ Python Matlab ANSYS Fluent C Fortran COMSOL News preCICE v2.0 Simplified config & API Better building & testing XML reference & visualizer xSDK member Faster initialization Better Python bindings Spack / Debian / AUR New Matlab bindings packages Upgrade guide in the wiki Other news deal.ii adapter new non-linear example for FSI FEniCS adapter new example for FSI code_aster adapter revived for code_aster 14 and preCICE v2 The OpenFOAM adapter -

New Development in Freefem++
J. Numer. Math., Vol. 20, No. 3-4, pp. 251–265 (2012) DOI 10.1515/jnum-2012-0013 c de Gruyter 2012 New development in freefem++ F. HECHT∗ Received July 2, 2012 Abstract — This is a short presentation of the freefem++ software. In Section 1, we recall most of the characteristics of the software, In Section 2, we recall how to to build the weak form of a partial differential equation (PDE) from the strong form. In the 3 last sections, we present different examples and tools to illustrated the power of the software. First we deal with mesh adaptation for problems in two and three dimension, second, we solve numerically a problem with phase change and natural convection, and the finally to show the possibilities for HPC we solve a Laplace equation by a Schwarz domain decomposition problem on parallel computer. Keywords: finite element, mesh adaptation, Schwarz domain decomposition, parallel comput- ing, freefem++ 1. Introduction This paper intends to give a small presentation of the software freefem++. A partial differential equation is a relation between a function of several variables and its (partial) derivatives. Many problems in physics, engineering, mathematics and even banking are modeled by one or several partial differen- tial equations. Freefem++ is a software to solve these equations numerically in dimen- sions two or three. As its name implies, it is a free software based on the Finite Element Method; it is not a package, it is an integrated product with its own high level programming language; it runs on most UNIX, WINDOWS and MacOs computers. -

Model Order Reduction for Aerodynamic Lifting Surfaces Aerospace Engineering
Model Order Reduction for Aerodynamic Lifting Surfaces Gonçalo da Cunha Laboreiro Mendonça Thesis to obtain the Master of Science Degree in Aerospace Engineering Supervisors: Prof. Fernando José Parracho Lau Dr. Frederico José Prata Rente Reis Afonso Examination Committee Chairperson: Prof. Filipe Szolnoky Ramos Pinto Cunha Supervisor: Prof. Fernando José Parracho Lau Member of the Committee: Prof. Afzal Suleman November 2017 ii Dedicated to my family and friends, who were always there for me. iii iv Acknowledgments I would like to thank dearly my supervisors Prof. Lau and Dr. Afonso who gave me constant support throughout this thesis up until the very end. Their insights on aerodynamics and CFD models guided me in my research of model order reduction methods and allowed me to better understand the models with which I had to work. Their demands for rigor and quality also pushed me to better my work, and in the end write a better thesis. v vi Resumo Nesta tese o tema de reduc¸ao˜ de modelos e a sua aplicac¸ao˜ a Mecanicaˆ de Fluidos Computacional sao˜ abordados. E´ mostrada a necessidade da industria´ aeroespacial, seja nacional ou Europeia, de modelos mais rapidos´ mas fieis´ a` realidade. Isto e´ devido ao elevado tempo de calculo´ associado aos modelos de alta-fidelidade. Estes mostram-se pouco viaveis´ para aplicac¸oes˜ do tipo Optimizac¸ao˜ Multi- disciplinar, como a plataforma de optimizac¸ao˜ NOVEMOR. Tendo por objectivo testar e aplicar reduc¸ao˜ de modelos a modelos CFD de superf´ıcies sustentadoras, uma pesquisa bibliografica´ abrangendo a reduc¸ao˜ de modelos nao-lineares,˜ dinamicosˆ e ou estaticos´ foi feita. -

The One-Way FSI Method Based on RANS-FEM for the Open Water Test of a Marine Propeller at the Different Loading Conditions
Journal of Marine Science and Engineering Article The One-Way FSI Method Based on RANS-FEM for the Open Water Test of a Marine Propeller at the Different Loading Conditions Mobin Masoomi 1 and Amir Mosavi 2,3,* 1 Department of Mechanical Engineering, Babol Noshirvani University of Technology, Babol, Iran; [email protected] 2 Faculty of Civil Engineering, Technische Universität Dresden, 01069 Dresden, Germany 3 John von Neumann Faculty of Informatics, Obuda University, 1034 Budapest, Hungary * Correspondence: [email protected] Abstract: This paper aims to assess a new fluid–structure interaction (FSI) coupling approach for the vp1304 propeller to predict pressure and stress distributions with a low-cost and high-precision approach with the ability of repeatability for the number of different structural sets involved, other materials, or layup methods. An outline of the present coupling approach is based on an open- access software (OpenFOAM) as a fluid solver, and Abaqus used to evaluate and predict the blade’s deformation and strength in dry condition mode, which means the added mass effects due to propeller blades vibration is neglected. Wherein the imposed pressures on the blade surfaces are extracted for all time-steps. Then, these pressures are transferred to the structural solver as a load condition. Although this coupling approach was verified formerly (wedge impact), for the case in-hand, a further verification case, open water test, was performed to evaluate the hydrodynamic part of the solution with an e = 7.5% average error. A key factor for the current coupling approach is Citation: Masoomi, M.; Mosavi, A. -

Wind Field Simulation in a Wind Farm Using Openfoam and Actuator Line Model
ParCFD'2019 31st International Conference on Parallel Computational Fluid Dynamics May-14-17 2019, Antalya TURKEY WIND FIELD SIMULATION IN A WIND FARM USING OPENFOAM AND ACTUATOR LINE MODEL Huseyin Can Onel∗ & Dr. Ismail H. Tuncery ∗ Middle East Technical University (METU) Department of Aerospace Engineering 06800 Ankara, TURKEY e-mail: [email protected] yMiddle East Technical University (METU) Department of Aerospace Engineering 06800 Ankara, TURKEY e-mail: [email protected] - Web page: http://www.ae.metu.edu.tr/tuncer/ Key words: Aerospace applications, Wind turbine, HAWT, Actuator Line Model, Wake calculation Abstract. In this study, a horizontal axis wind turbine (HAWT) is modeled using so called Actuator Line Model (ALM), where full resolution of boundary layer over turbine blades is not needed and hence computation is cheaper. Results are validated against other numerical and experimental studies as well as panel method (XFOIL) and Blade Element Momentum Theory (BEMT) results which are still widely employed in today's wind energy industry. Important simulation and operation parameters and their effects on accuracy are discussed. It is concluded that within a certain range of tip speed ratios, ALM gives acceptable results and is a promising model for full-scale wind farm simulations to estimate energy production. 1 INTRODUCTION Market share of renewable energy grows at ever highest rates and wind turbine and wind farm design processes becomes more sophisticated with the advancements in computation technologies. There are two main design problems in wind energy: • Design of an individual wind turbine at its ideal operation conditions, where classical methods like 2D airfoil theory, potential flow theory and Blade Element Momentum Theory (BEMT) are still widely used, • Design of a complete wind farm, in which statistical meteorological data is used for macro-siting and simple analytical or empirical methods are used for micro-siting. -
An XFEM Based Fixed-Grid Approach to Fluid-Structure Interaction
TECHNISCHE UNIVERSITAT¨ MUNCHEN¨ Lehrstuhl fur¨ Numerische Mechanik An XFEM based fixed-grid approach to fluid-structure interaction Axel Gerstenberger Vollstandiger¨ Abdruck der von der Fakultat¨ fur¨ Maschinenwesen der Techni- schen Universitat¨ Munchen¨ zur Erlangung des akademischen Grades eines Doktor-Ingenieurs (Dr.-Ing.) genehmigten Dissertation. Vorsitzender: Univ.-Prof. Dr.-Ing. habil. Nikolaus A. Adams Prufer¨ der Dissertation: 1. Univ.-Prof. Dr.-Ing. Wolfgang A. Wall 2. Prof. Peter Hansbo, Ph.D. University of Gothenburg / Sweden Die Dissertation wurde am 14. 4. 2010 bei der Technischen Universitat¨ Munchen¨ eingereicht und durch die Fakultat¨ fur¨ Maschinenwesen am 21. 6. 2010 ange- nommen. Zusammenfassung Die vorliegende Arbeit behandelt ein Finite Elemente (FE) basiertes Festgit- terverfahren zur Simulation von dreidimensionaler Fluid-Struktur-Interak- tion (FSI) unter Berucksichtigung¨ großer Strukturdeformationen. FSI ist ein oberflachengekoppeltes¨ Mehrfeldproblem, bei welchem Stuktur- und Fluid- gebiete eine gemeinsame Oberflache¨ teilen. In dem vorgeschlagenen Festgit- terverfahren wird die Stromung¨ durch eine Eulersche Betrachtungsweise be- schrieben, wahrend¨ die Struktur wie ublich¨ in Lagrangscher Betrachtungs- weise formuliert wird. Die Fluid-Struktur-Grenzflache¨ kann sich dabei un- abhangig¨ von dem ortsfesten Fluidnetz bewegen, so dass keine Fluidnetzver- formungen auftreten und beliebige Grenzflachenbewegungen¨ moglich¨ sind. Durch die unveranderte¨ Lagrangsche Strukturformulierung liegt der Schwer- punkt der Arbeit -

Development of a Coupling Approach for Multi-Physics Analyses of Fusion Reactors
Development of a coupling approach for multi-physics analyses of fusion reactors Zur Erlangung des akademischen Grades eines Doktors der Ingenieurwissenschaften (Dr.-Ing.) bei der Fakultat¨ fur¨ Maschinenbau des Karlsruher Instituts fur¨ Technologie (KIT) genehmigte DISSERTATION von Yuefeng Qiu Datum der mundlichen¨ Prufung:¨ 12. 05. 2016 Referent: Prof. Dr. Stieglitz Korreferent: Prof. Dr. Moslang¨ This document is licensed under the Creative Commons Attribution – Share Alike 3.0 DE License (CC BY-SA 3.0 DE): http://creativecommons.org/licenses/by-sa/3.0/de/ Abstract Fusion reactors are complex systems which are built of many complex components and sub-systems with irregular geometries. Their design involves many interdependent multi- physics problems which require coupled neutronic, thermal hydraulic (TH) and structural mechanical (SM) analyses. In this work, an integrated system has been developed to achieve coupled multi-physics analyses of complex fusion reactor systems. An advanced Monte Carlo (MC) modeling approach has been first developed for converting complex models to MC models with hybrid constructive solid and unstructured mesh geometries. A Tessellation-Tetrahedralization approach has been proposed for generating accurate and efficient unstructured meshes for describing MC models. For coupled multi-physics analyses, a high-fidelity coupling approach has been developed for the physical conservative data mapping from MC meshes to TH and SM meshes. Interfaces have been implemented for the MC codes MCNP5/6, TRIPOLI-4 and Geant4, the CFD codes CFX and Fluent, and the FE analysis platform ANSYS Workbench. Furthermore, these approaches have been implemented and integrated into the SALOME simulation platform. Therefore, a coupling system has been developed, which covers the entire analysis cycle of CAD design, neutronic, TH and SM analyses. -

Scientific Computing WS 2019/2020 Lecture 1 Jürgen Fuhrmann
Scientific Computing WS 2019/2020 Lecture 1 Jürgen Fuhrmann [email protected] Lecture 1 Slide 1 Me I Name: Dr. Jürgen Fuhrmann (no, not Prof.) I Affiliation: Weierstrass Institute for Applied Analysis and Stochastics, Berlin (WIAS); Deputy Head, Numerical Mathematics and Scientific Computing I Contact: [email protected] I Course homepage: http://www.wias-berlin.de/people/fuhrmann/teach.html I Experience/Field of work: I Numerical solution of partial differential equations (PDEs) I Development, investigation, implementation of finite volume discretizations for nonlinear systems of PDEs I Ph.D. on multigrid methods I Applications: electrochemistry, semiconductor physics, groundwater… I Software development: I WIAS code pdelib (http://pdelib.org) I Languages: C, C++, Python, Lua, Fortran, Julia I Visualization: OpenGL, VTK Lecture 1 Slide 2 Admin stuff I Lectures: Tue 10-12 FH 311, Thu 10-12 MA269 I Consultation: Thu 12-13 MA269, more at WIAS on appointment I There will be coding assignments in Julia I Unix pool I Installation possible for Linux, MacOSX, Windows I Access to examination I Attend ≈ 80% of lectures I Return assignments I Slides and code will be online, a script is being developed from the slides. I See course homepage for literature, specific hints during course Lecture 1 Slide 3 Thursday lectures in MA269 (UNIX Pool) https://www.math.tu-berlin.de/iuk/lehrrechnerbereich/v_menue/ lehrrechnerbereich/ I Working groups of two students per account/computer I Please sign up to the account list provided -
Livelink for MATLAB User's Guide
LiveLink™ for MATLAB® User’s Guide LiveLink™ for MATLAB® User’s Guide © 2009–2020 COMSOL Protected by patents listed on www.comsol.com/patents, and U.S. Patents 7,519,518; 7,596,474; 7,623,991; 8,457,932;; 9,098,106; 9,146,652; 9,323,503; 9,372,673; 9,454,625, 10,019,544, 10,650,177; and 10,776,541. Patents pending. This Documentation and the Programs described herein are furnished under the COMSOL Software License Agreement (www.comsol.com/comsol-license-agreement) and may be used or copied only under the terms of the license agreement. COMSOL, the COMSOL logo, COMSOL Multiphysics, COMSOL Desktop, COMSOL Compiler, COMSOL Server, and LiveLink are either registered trademarks or trademarks of COMSOL AB. MATLAB and Simulink are registered trademarks of The MathWorks, Inc.. All other trademarks are the property of their respective owners, and COMSOL AB and its subsidiaries and products are not affiliated with, endorsed by, sponsored by, or supported by those or the above non-COMSOL trademark owners. For a list of such trademark owners, see www.comsol.com/trademarks. Version: COMSOL 5.6 Contact Information Visit the Contact COMSOL page at www.comsol.com/contact to submit general inquiries, contact Technical Support, or search for an address and phone number. You can also visit the Worldwide Sales Offices page at www.comsol.com/contact/offices for address and contact information. If you need to contact Support, an online request form is located at the COMSOL Access page at www.comsol.com/support/case. Other useful links include: • Support Center: www.comsol.com/support • Product Download: www.comsol.com/product-download • Product Updates: www.comsol.com/support/updates • COMSOL Blog: www.comsol.com/blogs • Discussion Forum: www.comsol.com/community • Events: www.comsol.com/events • COMSOL Video Gallery: www.comsol.com/video • Support Knowledge Base: www.comsol.com/support/knowledgebase Part number: CM020008 Contents Chapter 1: Introduction About This Product 12 Help and Documentation 14 Getting Help .