Ecological Inference
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Assessing School and Teacher Effectiveness Using HLM and TIMSS Data from British Columbia and Ontario
Avoiding Ecological Fallacy: Assessing School and Teacher Effectiveness Using HLM and TIMSS Data from British Columbia and Ontario By Yichun Wei B. Eng. University of Hunan M. Sc. University of Hunan A Thesis submitted to the Faculty of Graduate Studies of The University of Manitoba in partial fulfillment of the requirements of the degree of DOCTOR OF PHILOSOPHY Faculty of Education University of Manitoba Winnipeg, MB. Canada Copyright © 2012 by Yichun Wei ABSTRACT There are two serious methodological problems in the research literature on school effectiveness, the ecological problem in the analysis of aggregate data and the problem of not controlling for important confounding variables. This dissertation corrects these errors by using multilevel modeling procedures, specifically Hierarchical Linear Modeling (HLM), and the Canadian Trends in International Mathematics and Science Study (TIMSS) 2007 data, to evaluate the effect of school variables on the students’ academic achievement when a number of theoretically-relevant student variables have been controlled. In this study, I demonstrate that an aggregate analysis gives the most biased results of the schools’ impact on the students’ academic achievement. I also show that a disaggretate analysis gives better results, but HLM gives the most accurate estimates using this nested data set. Using HLM, I show that the physical resources of schools, which have been evaluated by school principals and classroom teachers, actually have no positive impact on the students’ academic achievement. The results imply that the physical resources are important, but an excessive improvement in the physical conditions of schools is unlikely to improve the students’ achievement. Most of the findings in this study are consistent with the best research literature. -

2017 SPSA Conference Program
DETAILED PROGRAM JANUARY 12–14, 2017 NEW ORLEANS, LOUISIANA Sponsored by The University of Chicago Press, publishers of the Journal of Politics 1 www.spsa.net 2 Southern Political Science Association • 88th Annual Conference • January 12–14, 2017 • New Orleans Table of Contents Plenary Events and Sessions 7 – 11 Hotel Maps 12 – 15 Things To Do In The Central Business District 16 – 17 Committees 2015 – 2016 18 – 19 Award Winners 25 – 27 Professional Development 28 Authors Meet Critics 28 Round Tables 29 Mini-Conferences 30 – 35 2016 Program Committee 36 – 37 Conference Overview 38 – 55 Panels Listings 56 – 235 Thursday 56 – 112 Friday 113 – 158 Saturday 159 – 213 Participant Index 214 – 225 2017 Program Committee 226 – 227 3 88th Annual Conference Officers and Staff 2016-2017 President William G. Jacoby, Michigan State University President Elect Judith Baer, Texas A&M University Vice President Jeff Gill, Washington University in St.Louis Vice President Elect Saundra Schneider, Michigan State University 2019 President David Lewis, Vanderbilt University Executive Director Robert Howard, Georgia State University Secretary Lee Walker, University of North Texas Treasurer Sue Tolleson-Rinehart, University of North Carolina Past President Ann Bowman, Texas A&M University Executive Council Jasmine Farrier, University of Louisville Pearl Ford Dowe, University of Arkansas Susan Haire, University of Georgia D. Sunshine Hillygus, Duke University Cherie Maestas, Florida State University Seth McKee, Texas Tech University D’Andra Orey, Jackson State University Kirk Randazzo, University of South Carolina Mary Stegmaier, University of Missouri Journal of Politics Editors Jeffery A. Jenkins, University of Virginia, Editor-in Chief Elisabeth Ellis, University of Otago Sean Gailmard, University of California, Berkeley Lanny Martin, Rice University Jennifer L. -

The Impact Factor Fallacy
bioRxiv preprint doi: https://doi.org/10.1101/108027; this version posted February 20, 2017. The copyright holder for this preprint (which was not certified by peer review) is the author/funder. All rights reserved. No reuse allowed without permission. 1 Title: 2 The impact factor fallacy 3 Authors: 4 Frieder Michel Paulus 1; Nicole Cruz 2,3; Sören Krach 1 5 Affiliations: 6 1 Department of Psychiatry and Psychotherapy, Social Neuroscience Lab, University of Lübeck, 7 Ratzeburger Allee 160, D-23538 Lübeck, Germany 8 2 Department of Psychological Sciences, Birkbeck, University of London, London, UK 9 3 Laboratoire CHArt, École Pratique des Hautes Études (EPHE), Paris, France 10 Corresponding Authors: 11 Frieder Paulus, phone: ++49-(0)451- 31017527, email: [email protected] 12 Sören Krach, phone: ++49-(0)451-5001717, email: [email protected] 13 Department of Psychiatry and Psychotherapy, Social Neuroscience Lab, University of Lübeck, 14 Ratzeburger Allee 160, D-23538 Lübeck, Germany 15 Author contributions: 16 FMP, NC, and SK wrote the manuscript. 17 Running title: The impact factor fallacy 18 Word count abstract: 135 19 Word count manuscript (including footnotes): 4013 20 Number of tables: 1 21 Number of figures: 0 1 bioRxiv preprint doi: https://doi.org/10.1101/108027; this version posted February 20, 2017. The copyright holder for this preprint (which was not certified by peer review) is the author/funder. All rights reserved. No reuse allowed without permission. 22 Abstract 23 The use of the journal impact factor (JIF) as a measure for the quality of individual 24 manuscripts and the merits of scientists has faced significant criticism in recent years. -
What Can Ecological Studies Tell Us About Death? Yehuda Neumark
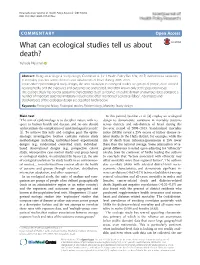
Neumark Israel Journal of Health Policy Research (2017) 6:52 DOI 10.1186/s13584-017-0176-x COMMENTARY Open Access What can ecological studies tell us about death? Yehuda Neumark Abstract: Using an ecological study design, Gordon et al. (Isr J Health Policy Res 6:39, 2017) demonstrate variations in mortality patterns across districts and sub-districts of Israel during 2008–2013. Unlike other epidemiological study designs, the units of analysis in ecological studies are groups of people, often defined geographically, and the exposures and outcomes are aggregated, and often known only at the population-level. The ecologic study has several appealing characteristics (suchasrelianceonpublic-domain anonymous data) alongside a number of important potential limitations including the often mentioned ‘ecological fallacy’.Advantagesand disadvantages of the ecological design are described briefly below. Keywords: Ecological fallacy, Ecological studies, Epidemiology, Mortality, Study design Main text In this journal, Gordon et al. [4] employ an ecological "The aim of epidemiology is to decipher nature with re- design to demonstrate variations in mortality patterns spect to human health and disease, and no one should across districts and sub-districts of Israel during the underestimate the complexities of epidemiological research" five-year period of 2008–2013. Standardized mortality [1]. To achieve this lofty and complex goal, the epide- ratios (SMRs) reveal a 25% excess of kidney disease re- miologic investigative toolbox contains various study lated deaths in the Haifa district, for example, while the methodologies including individual-based experimental risk of death from influenza/pneumonia is 25% lower designs (e.g., randomized controlled trial), individual- there than the national average. -

A Statistical Guide for the Ethically Perplexed Preamble Introduction
A Statistical Guide for the Ethically Perplexed Lawrence Hubert and Howard Wainer Preamble The meaning of \ethical" adopted here is one of being in accordance with the accepted rules or standards for right conduct that govern the practice of some profession. The profes- sions we have in mind are statistics and the behavioral sciences, and the standards for ethical practice are what we try to instill in our students through the methodology courses we offer, with particular emphasis on the graduate statistics sequence generally required for all the behavioral sciences. Our hope is that the principal general education payoff for competent statistics instruction is an increase in people's ability to be critical and ethical consumers and producers of the statistical reasoning and analyses faced in various applied contexts over the course of their careers. Introduction Generations of graduate students in the behavioral and social sciences have completed mandatory year-long course sequences in statistics, sometimes with difficulty and possibly with less than positive regard for the content and how it was taught. Prior to the 1960's, such a sequence usually emphasized a cookbook approach where formulas were applied un- thinkingly using mechanically operated calculators. The instructional method could be best characterized as \plug and chug," where there was no need to worry about the meaning of what one was doing, only that the numbers could be put in and an answer generated. This process would hopefully lead to numbers that could then be looked up in tables; in turn, p-values were sought that were less than the magical .05, giving some hope of getting an attendant paper published. -

Some Topics in Health Economics That Become Distorted Cliches for Health Policy
Health Policy Papers Collection 2017 – 09 (bis) SOME TOPICS IN HEALTH ECONOMICS THAT BECOME DISTORTED CLICHES FOR HEALTH POLICY Guillem López Casasnovas Professor at the Department of Economics and Business Universitat Pompeu Fabra Centre for Research in Health and Economics (CRES) Ricard Meneu Fundación Instituto de Investigación en Servicios de Salud (IISS) Centre de Recerca en Economia i Salut (CRES) Barcelona The Policy Papers Collection includes a series form, in Health Economics and Health Policy, carried out and selected by Researchers from the Centre for Research in Health and Economics of the University Pompeu Fabra (CRES - UPF). The Collection Policy Papers is part of an agreement between UPF and Novartis, whose activities provided not conditioned support of Novartis to the dissemination of studies and research of the CRES-UPF. "This is an Open Access article distributed under the terms of the Creative Commons Attribution License 4.0 International, which permits unrestricted use, distribution and reproduction in any medium provided that the original work is properly attributed" https://creativecommons.org/licenses/by/4.0/ Barcelona, October 2017 1 2 Health Policy Papers Collection 2017 – 09(bis) SOME TOPICS IN HEALTH ECONOMICS THAT BECOME DISTORTED CLICHES FOR HEALTH POLICY Guillem López i Casasnovas (1) y Ricard Meneu de Guillerna (2) (1) Department of Economics and Business. Centre for Research in Health and Economics (CRES). Universitat Pompeu Fabra (UPF). (2) Fundación Instituto de Investigación en Servicios de Salud (IISS). Centre for Research in Health and Economics (CRES) Introduction. The purpose of this paper is to pick up some of the best known clichés that surround the translation of the equivalent topics in health economics into health policy. -

Appendix 1 a Great Big List of Fallacies
Why Brilliant People Believe Nonsense Appendix 1 A Great Big List of Fallacies To avoid falling for the "Intrinsic Value of Senseless Hard Work Fallacy" (see also "Reinventing the Wheel"), I began with Wikipedia's helpful divisions, list, and descriptions as a base (since Wikipedia articles aren't subject to copyright restrictions), but felt free to add new fallacies, and tweak a bit here and there if I felt further explanation was needed. If you don't understand a fallacy from the brief description below, consider Googling the name of the fallacy, or finding an article dedicated to the fallacy in Wikipedia. Consider the list representative rather than exhaustive. Informal fallacies These arguments are fallacious for reasons other than their structure or form (formal = the "form" of the argument). Thus, informal fallacies typically require an examination of the argument's content. • Argument from (personal) incredulity (aka - divine fallacy, appeal to common sense) – I cannot imagine how this could be true, therefore it must be false. • Argument from repetition (argumentum ad nauseam) – signifies that it has been discussed so extensively that nobody cares to discuss it anymore. • Argument from silence (argumentum e silentio) – the conclusion is based on the absence of evidence, rather than the existence of evidence. • Argument to moderation (false compromise, middle ground, fallacy of the mean, argumentum ad temperantiam) – assuming that the compromise between two positions is always correct. • Argumentum verbosium – See proof by verbosity, below. • (Shifting the) burden of proof (see – onus probandi) – I need not prove my claim, you must prove it is false. • Circular reasoning (circulus in demonstrando) – when the reasoner begins with (or assumes) what he or she is trying to end up with; sometimes called assuming the conclusion. -
OMB No. 0925-0046, Biographical Sketch Format Page
OMB No. 0925-0001 and 0925-0002 (Rev. 03/2020 Approved Through 02/28/2023) BIOGRAPHICAL SKETCH Provide the following information for the Senior/key personnel and other significant contributors. Follow this format for each person. DO NOT EXCEED FIVE PAGES. NAME: Jeff Gill eRA COMMONS USER NAME (credential, e.g., agency login): JGILL22 POSITION TITLE: Distinguished Professor EDUCATION/TRAINING DEGREE Completion (if Date FIELD OF STUDY INSTITUTION AND LOCATION applicable) MM/YYYY University of California, Los Angeles BA 1984 Mathematics Georgetown University, Washington DC Masters 1988 Business Administration American University, Washington, DC Ph.D. 1996 Statistics, Government Harvard University, Boston Postdoctoral 1998 Statistics, Government A. Personal Statement I am currently Distinguished Professor in the Department of Government, Professor in the Department of Mathematics & Statistics, and a member of the Center for Behavioral Neuroscience at American University. I have done extensive work in the development of Bayesian hierarchical models, nonparametric Bayesian models, elicited prior development from expert interviews, as well in fundamental issues in statistical inference. I have extensive expertise in statistical computing, Markov chain Monte Carlo (MCMC) tools in particular. Most sophisticated Bayesian models for the social or medical sciences require complex, compute-intensive tools such as MCMC to efficiently estimate parameters of interest. I am an expert in these statistical and computational techniques and use them to contribute to empirical knowledge in the biomedical and social sciences. Current theoretical work builds logically on my prior applied work and adds opportunities to develop new hybrid algorithms for statistical estimation with multilevel specifications and complex time-series and spatial relationships, as well clustering detection within algorithms. -
American Gridlock: the Sources, Character, and Impact of Political Polarization Edited by James A
Cambridge University Press 978-1-107-11416-6 - American Gridlock: The Sources, Character, and Impact of Political Polarization Edited by James A. Thurber And Antoine Yoshinaka Frontmatter More information American Gridlock American Gridlock brings together the country’s preeminent experts on the causes, characteristics, and consequences of partisan polarization in U.S. politics and government, with each chapter presenting original scholarship and novel data. This book is the first to combine research on all facets of polarization, among the public (both voters and acti- vists), in our federal institutions (Congress, the presidency, and the Supreme Court), at the state level, and in the media. Each chapter includes a bullet-point summary of its main argument and conclusions, and is written in clear prose that highlights the substantive implications of polarization for representation and policymaking. The authors examine polarization with an array of current and historical data, including public opinion surveys; electoral, legislative, and congres- sional data; experimental data; and content analyses of media outlets. American Gridlock’s theoretical and empirical depth distinguishes it from any other volume on polarization. James A. Thurber is University Distinguished Professor of Government and Founder and Director of the Center for Congressional and Presidential Studies at American University. In 2010, he won the Walter Beach Pi Sigma American Political Science Association Award for his work combining applied and academic research. He is a fellow of the National Academy of Public Administration and a member of the American Bar Association’s Task Force on Lobbying Law Reform. He is the author of multiple books and more than eighty articles and chapters on Congress, congressional-presidential relations, congressional bud- geting, congressional reform, interest groups and lobbying, congres- sional ethics, and campaigns and elections. -
CV for Webpage
JEFF GILL August 3, 2021 POSITIONS American University Distinguished Professor, Department of Government, and Department of Mathematics & Statistics, July 2017–Present. Member, Center for Behavioral Neuroscience, July 2017–Present. Founder and Director, Center for Data Science, January 2018–Present. Co-Director, Biostatistics Program, November 2017–Present. Washington University in St. Louis Professor Emeritus, July 2017–Present. Professor, Department of Political Science, College of Arts & Sciences (primary appointment), July 2007– July 2017. Professor, Division of Biostatistics, School of Medicine (secondary appointment), July 2011–July 2017. Professor, Department of Surgery (Division of Public Health Sciences), School of Medicine (research appointment), July 2011–July 2017. Professor, Department of Mathematics, College of Arts & Sciences (courtesy appointment), July 2008– July 2017. Professor and Co-Founder, Machine Learning Group, September 2012–July 2017. Director, Center for Applied Statistics, Washington University, July 2007–July 2011. University of California, Davis Professor, Department of Political Science, July 2007 (promoted). Associate Professor, Department of Political Science, January 2004–July 2007. Member, Graduate Group in Epidemiology, July 2005–July 2007. Harvard University Visiting Professor, Department of Government, January 2021–July 2021. Faculty Associate, Institute for Quantitative Social Science, January 2021–July 2021. Visiting Professor, Department of Government, January 2018–July 2018. Faculty Associate, Institute for Quantitative Social Science, January 2018–July 2018. Visiting Associate Professor, Department of Government, July 2006–July 2007. Faculty Associate, Institute for Quantitative Social Science, July 2006–July 2007. University of Florida Associate Professor, Department of Political Science, May 2002–December 2003. Assistant Professor, Department of Political Science, August 2000–May 2002. Courtesy Professor, Department of Statistics, August 2000–Present (not a typo). -

List of Fallacies
List of fallacies For specific popular misconceptions, see List of common if>). The following fallacies involve inferences whose misconceptions. correctness is not guaranteed by the behavior of those log- ical connectives, and hence, which are not logically guar- A fallacy is an incorrect argument in logic and rhetoric anteed to yield true conclusions. Types of propositional fallacies: which undermines an argument’s logical validity or more generally an argument’s logical soundness. Fallacies are either formal fallacies or informal fallacies. • Affirming a disjunct – concluding that one disjunct of a logical disjunction must be false because the These are commonly used styles of argument in convinc- other disjunct is true; A or B; A, therefore not B.[8] ing people, where the focus is on communication and re- sults rather than the correctness of the logic, and may be • Affirming the consequent – the antecedent in an in- used whether the point being advanced is correct or not. dicative conditional is claimed to be true because the consequent is true; if A, then B; B, therefore A.[8] 1 Formal fallacies • Denying the antecedent – the consequent in an indicative conditional is claimed to be false because the antecedent is false; if A, then B; not A, therefore Main article: Formal fallacy not B.[8] A formal fallacy is an error in logic that can be seen in the argument’s form.[1] All formal fallacies are specific types 1.2 Quantification fallacies of non sequiturs. A quantification fallacy is an error in logic where the • Appeal to probability – is a statement that takes quantifiers of the premises are in contradiction to the something for granted because it would probably be quantifier of the conclusion. -

Preliminary Program V. 2.0 Southern Political Science Association 2021 Annual Meeting Online, January 6-9, 2021
Preliminary Program v. 2.0 Southern Political Science Association 2021 Annual Meeting Online, January 6-9, 2021 1100 WSSR Workshop: Case Studies for Policy Analysis I Wednesday Program Chair's Panels/Program Chair's Panels (Online) 8:00am-11:00am Churchill A1 - 2nd Chair Floor Derek Beach, Aarhus University 1100 WSSR Workshop: Generalized Linear Regression Models for Social Scientists I Wednesday Program Chair's Panels/Program Chair's Panels (Online) 8:00am-11:00am Churchill A2 - 2nd Chair Floor Jeff Gill, American University 1100 1100 WSSR Workshop: Analyzing the 2020 American Election I Wednesday Program Chair's Panels/Program Chair's Panels (Online) 8:00am-11:00am Churchill B1 - 2nd Chair Floor Harold Clarke, University of Texas at Dallas 1400 WSSR Workshop: Process-Tracing Methods I Wednesday Program Chair's Panels/Program Chair's Panels (Online) 12:30pm-3:30pm Churchill A1 - 2nd Chair Floor Andrew Bennett, State University of New York at Binghamton 1400 1400 WSSR Workshop: Generalized Linear Regression Models for Social Scientists II Wednesday Program Chair's Panels/Program Chair's Panels (Online) 12:30pm-3:30pm Churchill A2 - 2nd Chair Floor Jeff Gill, American University 1400 WSSR Workshop: Analyzing the 2020 American Election II Wednesday Program Chair's Panels/Program Chair's Panels (Online) 12:30pm-3:30pm Churchill B1 - 2nd Chair Floor Harold Clarke, University of Texas at Dallas 1600 1600 WSSR Workshop: Defining and Working with Concepts in the Social Sciences I Wednesday Program Chair's Panels/Program Chair's Panels (Online)