Modelling the Propeller Slipstream Effect on the Longitudinal Stability and Control
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

General Information Summary
The purpose of the Dutch Safety Board’s work is to prevent future accidents and incidents or to limit their after-effects. It is no part of the Board’s remit to try to establish the blame, responsibility or liability attaching to any party. Information gathered during the course of an investigation – including statements given to the Board, information that the Board has compiled, results of technical research and analyses and drafted documents (including the published report) – cannot be used as evidence in criminal, disciplinary or civil law proceedings. GENERAL INFORMATION Identification number: 2007044 Classification: Serious incident Date, time1 of occurrence: 18 May 2007, 20.53 hours Location of occurrence: Groningen Airport Eelde (EHGG) Aircraft registration: OO-VLI Aircraft model: Fokker F27 MK50 (Fokker 50) Type of aircraft: Passenger Aircraft Type of flight: Scheduled passenger transport Phase of operation: Landing Damage to aircraft: Minor Cockpit crew: Two Cabin crew: One Passengers: Eleven Injuries: None Other damage: One runway edge light and a runway end light destroyed Light conditions: Daylight (sunset at 21.32 hours) SUMMARY A Fokker 50 made a flight from Amsterdam Schiphol Airport to Groningen Airport Eelde. After executing a visual approach to runway 05, the aircraft landed long (approximately halfway along the runway) and at high speed. The crew was unable to stop the aircraft within the remaining runway length. Subsequently, it ran off the end of the runway and came to a halt in the grass. None of the fourteen persons on board was injured. The aircraft sustained minor damage. This report is mainly based on information from the flight data recorder and the cockpit voice recorder and interviews with the flight crew members. -

Electronic Flight Bag (EFB): 2010 Industry Survey
Electronic Flight Bag (EFB): 2010 Industry Survey Scott Gabree Michelle Yeh Young Jin Jo U.S. Department of Transportation Research and Innovative Technology Administration John A. Volpe National DOT-VNTSC-FAA-10-14 Transportation Systems Center Cambridge, MA 02142 Air Traffic Organization Operations Planning Human Factors Research and Engineering Group September 2010 Washington, DC 20591 This document is available to the public through the National Technical Information Service, Springfield, Virginia, 22161 Notice This document is disseminated under the sponsorship of the Department of Transportation in the interest of information exchange. The United States Government assumes no liability for its contents or use thereof. Notice The United States Government does not endorse products or manufacturers. Trade or manufacturers’ names appear herein solely because they are considered essential to the objective of this report. Form Approved REPORT DOCUMENTATION PAGE OMB No. 0704-0188 Public reporting burden for this collection of information is estimated to average 1 hour per response, including the time for reviewing instructions, searching existing data sources, gathering and maintaining the data needed, and completing and reviewing the collection of information. Send comments regarding this burden estimate or any other aspect of this collection of information, including suggestions for reducing this burden, to Washington Headquarters Services, Directorate for Information Operations and Reports, 1215 Jefferson Davis Highway, Suite 1204, Arlington, VA 22202-4302, and to the Office of Management and Budget, Paperwork Reduction Project (0704-0188), Washington, DC 20503. 1. AGENCY USE ONLY (Leave blank) 2. REPORT DATE 3. REPORT TYPE AND DATES September 2010 COVERED Final Report 4. TITLE AND SUBTITLE 5. -

215293694.Pdf
EFFECTS OF A WINGTIP-MOUNTED PROPELLER ON WING LIFT, INDUCED DRAG, AND SHED VORTEX PATTERN By MELVIN H. SNYDER, JR. II Bachelor of Science in Mechanical Engineering Carnegie Institute of Technology Pittsburgh, Pennsylvania 1947 Master of Science in Aeronautical Engineering Wichita State University Wichita, Kansas 1950 Submitted to the Faculty of the Graduate College of the Oklahoma State University in partial fulfillment of the requirements for the Degree of DOCTOR OF PHILOSOPHY May, 1967 OKLAHOMA STATE UNIVERSrrf LIBRARY JAN 18 1968 EFFECTS OF A WINGTIP-MOUNTED PROPELLER·· --..-.- --., ON WING LIFT, INDUCED DRAG, AND SHED VORTEX PATTERN Thesis Approved: Deanoa~ of the Graduate College 660169 ii PREFACE The subject of induced drag is one that is both intriguing and frustrating to an aerodynamicist. It is the penalty that must be paid for producing lift using a wing having a finite span. Induced drag is drag that would be present even in a perfect (inviscid) fluid. Also present is the trailing vortex which produces the induced drag. It was desired to determine whether it was possible to combine the swirling of a propeller slipstream with the trailing wing vortex in ways such that the wing loading would be affected and the induced drag either increased or decreased. This paper reports the results of a wind tunnel testing program designed to examine this idea. Indebtedness is acknowledged to the National Science Foundation for the financial support through a Science Faculty Fellowship, which made possible graduate study at Oklahoma State University. Acknowledgement is gratefully made of the guidance and encouragement of Dr. G. W. -
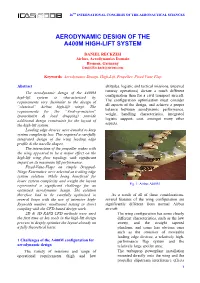
Aerodynamic Design of the A400m High-Lift System
26TH INTERNATIONAL CONGRESS OF THE AERONAUTICAL SCIENCES AERODYNAMIC DESIGN OF THE A400M HIGH-LIFT SYSTEM DANIEL RECKZEH Airbus, Aerodynamics Domain Bremen, Germany [email protected] Keywords: Aerodynamic Design, High-Lift, Propeller, Fixed Vane Flap Abstract altitudes, logistic and tactical missions, unpaved runway operations) dictate a much different The aerodynamic design of the A400M configuration than for a civil transport aircraft. high-lift system is characterized by The configuration optimisation must consider requirements very dissimilar to the design of all aspects of the design, and achieve a proper “classical” Airbus high-lift wings. The balance between aerodynamic performance, requirements for the “Airdrop-mission” weight, handling characteristics, integrated (parachutist & load dropping) provide logistic support, cost, amongst many other additional design constraints for the layout of aspects. the high-lift system. Leading edge devices were avoided to keep system complexity low. This required a carefully integrated design of the wing leading edge profile & the nacelle shapes. The interaction of the propeller wakes with the wing appeared to be a major effect on the high-lift wing flow topology with significant impact on its maximum lift performance. Fixed-Vane-Flaps on simple Dropped- Hinge Kinematics were selected as trailing edge system solution. While being beneficial for lower system complexity and weight the layout represented a significant challenge for an Fig. 1: Airbus A400M optimised aerodynamic design. The solution therefore had to be carefully optimised in As a result of all of these considerations, several loops with the use of intensive high- several features of the wing configuration are Reynolds number windtunnel testing in direct significantly different from normal Airbus coupling with the CFD-based design work. -

DESCRIPTION Fokker 50
Fokker 50 - Power Plant DESCRIPTION The aircraft is equipped with two Pratt and Whitney PW 125B turboprop engines, which are enclosed, in wing-mounted nacelles. Each engine drives a Dowty Rotol six-bladed reversible- pitch constant-speed propeller. The engine is essentially a twin-spool turbojet combined with a free power-turbine assembly, which drives the reduction gearbox and propeller via a third concentric shaft. Engine layout Air intake The air intake is located below the propeller spinner. The intake has an anti-icing system. Combustion section The combustion section comprises an annular combustion chamber, fourteen fuel nozzles, and two igniters. Fuel control is through combined mechanical and electronic control systems. High pressure spool This spool comprises a centrifugal compressor and a single stage axial turbine. HP-spool rpm (NH) is governed by fuel metering. The spool drives the HP fuel pump and the lubrication oil pumps. Low pressure spool This spool comprises a centrifugal compressor and a single stage axial turbine. The LP spool is ungoverned; it is free to adapt itself to the operating conditions. LP-spool rpm is designated NL. To ease the gas flow paths and to minimize the gyroscopic moment, the LP spool rotates in a direction opposite to the HP spool and power-turbine shaft. Power turbine The two-stage axial power turbine drives the propeller via the reduction gearbox. The propeller shaft line is set above the engine shaft centerline. Propeller rpm is designated NP. The reduction gearbox also drives an integrated drive generator, a hydraulic pump, a propeller-pitch-control oil pump, a propeller overspeed governor, and the NP indicator. -
Wing Shape Multidisciplinary Design Optimization
Faculty of Aerospace Engineering Wing Shape Multidisciplinary Design Optimization Jan Mariens August 2, 2012 Wing Shape Multidisciplinary Design Optimization Master of Science Thesis For obtaining the degree of Master of Science in Aerospace Engineering at Delft University of Technology Jan Mariens August 2, 2012 Faculty of Aerospace Engineering Delft University of Technology · Delft University of Technology Copyright c Jan Mariens All rights reserved. Delft University Of Technology Department Of Flight Performance and Propulsion The undersigned hereby certify that they have read and recommend to the Faculty of Aerospace En- gineering for acceptance a thesis entitled “Wing Shape Multidisciplinary Design Optimization” by Jan Mariens in partial fulfillment of the requirements for the degree of Master of Science. Dated: August 2, 2012 Head of Department: Dr. ir. Dries Visser Supervisor: Ali Elham, MSc. Reader one: Prof. dr. ir. Egbert Torenbeek Reader two: Dr. ir. Roelof Vos Summary Multidisciplinary design optimizations have shown great benefits for aerospace applications in the past. Especially in the last decades with the advent of high speed computing. Still computational time limits the desire for models with high level of fidelity cannot be always fulfilled. As a conse- quence, fidelity is often sacrificed in order to keep the computing time of the optimization within limits. There is always a compromise required to select proper tools for an optimization problem. In this final thesis work, the differences between existing weight modeling techniques are investi- gated. Secondly, the results of using different weight modeling techniques in multidisciplinary design optimization of aircraft wings is compared. The aircraft maximum take-off weight was selected as the objective function. -

Air Transport
The History of Air Transport KOSTAS IATROU Dedicated to my wife Evgenia and my sons George and Yianni Copyright © 2020: Kostas Iatrou First Edition: July 2020 Published by: Hermes – Air Transport Organisation Graphic Design – Layout: Sophia Darviris Material (either in whole or in part) from this publication may not be published, photocopied, rewritten, transferred through any electronical or other means, without prior permission by the publisher. Preface ommercial aviation recently celebrated its first centennial. Over the more than 100 years since the first Ctake off, aviation has witnessed challenges and changes that have made it a critical component of mod- ern societies. Most importantly, air transport brings humans closer together, promoting peace and harmo- ny through connectivity and social exchange. A key role for Hermes Air Transport Organisation is to contribute to the development, progress and promo- tion of air transport at the global level. This would not be possible without knowing the history and evolu- tion of the industry. Once a luxury service, affordable to only a few, aviation has evolved to become accessible to billions of peo- ple. But how did this evolution occur? This book provides an updated timeline of the key moments of air transport. It is based on the first aviation history book Hermes published in 2014 in partnership with ICAO, ACI, CANSO & IATA. I would like to express my appreciation to Professor Martin Dresner, Chair of the Hermes Report Committee, for his important role in editing the contents of the book. I would also like to thank Hermes members and partners who have helped to make Hermes a key organisa- tion in the air transport field. -

A Numerical Blade Element Approach to Estimating Propeller Flowfields
A Numerical Blade Element Approach to Estimating Propeller Flowfields Douglas F. Hunsaker∗ Brigham Young University, Provo, UT, 84606, USA A numerical method is presented as a low computational cost approach to modeling an induced propeller flowfield. This method uses blade element theory coupled with momen- tum equations to predict the axial and tangential velocities within the slipstream of the propeller, without the small angle approximation assumption common to most propeller models. The approach is of significant importance in the design of tail-sitter vertical take- off and landing (VTOL) aircraft, where the propeller slipstream is the primary source of air flow past the wings in some flight conditions. The algorithm is presented, the model is characterized, and the results (including the results of coupling the propeller model with a lifting-line aerodynamic model) are compared with published experimental data. Nomenclature Bd = slipstream development factor b = number of blades Cl = section coefficient of lift cb = blade section chord Dp = propeller diameter J = advance ratio N = number of blade sections Rp = propeller radius r = radial distance from propeller axis s = normal distance to propeller plane Vi = blade section total induced velocity Vθi = blade section induced tangential velocity α = angle of attack to freestream βt = geometric angle of attack at propeller tip i = blade section induced angle of attack ∞ = blade section advance angle of attack Γ = blade section circulation κ = Goldstein’s kappa factor ω = propeller angular velocity θ = azimuthal angle of propeller I. Introduction nterest in vertical take-off and landing (VTOL) small unmanned air vehicles (SUAVs) has heightened Irecently as micro autopilots have become capable of handling flight trajectories common to VTOL mis- sions. -

Alliance Aviation Services Limited A.C.N
Alliance Aviation Services Limited A.C.N. 153 361 525 PO Box 1126 EAGLE FARM QLD 4009 Telephone +61 7 3212 1212 Facsimile +61 7 3212 1522 www.allianceairlines.com.au 25 November 2015 Alliance Aviation Services (ASX code: AQZ) Alliance Aviation creates a new business and establishes a European presence . Alliance Aviation Services Limited (Alliance or the Company) today announced that it has contracted to purchase Austrian Airlines entire fleet of 21 Fokker Aircraft for a total consideration of USD 15 million ( a combination of shares and deferred cash payments). This fleet consists of 15 Fokker 100 and 6 Fokker 70 aircraft. It provides Alliance with a cost effective and guaranteed supply of engines and parts for its existing fleet. This acquisition provides significant revenue opportunities in wet leasing, dry leasing, engine sales and leasing, spare parts sales and aircraft sales. It diversifies Alliance’s revenue streams. No debt funding is required to undertake this acquisition. Austrian Airlines AG becomes a shareholder of Alliance. The transaction will be earnings accretive in future years. Overview Alliance Aviation Services Limited (Alliance or the Company) today announced that it has executed a binding contract to purchase Austrian Airlines entire fleet of 21 Fokker Aircraft for a total consideration of USD 15 million. This fleet consists of 15 Fokker 100 and 6 Fokker 70 aircraft. Strategic Rationale Over the last 18 months Alliance has undertaken a strategic review of its operations as a result of reduced activity in the resources sector. This has resulted in a number of measures For personal use only being undertaken that have improved our cost base and the efficient delivery of our services to our clients whilst at the same time looking for revenue opportunities. -

Slipstream Deformation of a Propeller-Wing Combination Applied for Convertible Uavs in Hover Condition Yuchen Leng, Murat Bronz, T
Slipstream Deformation of a Propeller-Wing Combination Applied for Convertible UAVs in Hover Condition Yuchen Leng, Murat Bronz, T. Jardin, Jean-Marc Moschetta To cite this version: Yuchen Leng, Murat Bronz, T. Jardin, Jean-Marc Moschetta. Slipstream Deformation of a Propeller-Wing Combination Applied for Convertible UAVs in Hover Condition. IMAV 2019, 11th International Micro Air Vehicle Competition and Conference, Sep 2019, Madrid, Spain. 10.1142/S2301385020500247. hal-02312623 HAL Id: hal-02312623 https://hal-enac.archives-ouvertes.fr/hal-02312623 Submitted on 11 Oct 2019 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. IMAV2019-13 11th INTERNATIONAL MICRO AIR VEHICLE COMPETITION AND CONFERENCE Slipstream Deformation of a Propeller-Wing Combination Applied for Convertible UAVs in Hover Condition Y. Leng∗, M. Bronz, T. Jardin and J-M. Moschetta ISAE-SUPAERO, Université de Toulouse, France ENAC, Université de Toulouse, France ABSTRACT up new type of missions. Rotor lifting system is inefficient for long-endurance flight, and thus mission range is limited. On the other hand, most current fixed-wing UAVs rely on Convertible unmanned aerial vehicle (UAV) promises a good balance between convenient crew and sometimes specific systems for launch and recovery, autonomous launch/recovery and efficient long which limits the origin and destination to dedicated points range cruise performance. -

Small Transport Aircraft
SMALL TRANSPORT AIRCRAFT A Catalogue of New and Used Commuter / Regional Aircraft SAMPLE © AVMARK, Inc. Table of Contents Introduction 1 Market Overview 2 Regional Jet Phenomenon 4 ATR 42 5 ATR 72 12 BAE ATP 19 BAE Avro RJ 70/85 23 BAE Jetstream 31/32 29 BAE Jetstream 41 36 Beech C99 40 Beech 1900 44 Canadair Regional Jet (CRJ) 100/200 51 Canadair Regional Jet (CRJ) 700 58 CASA 212 62 CN235 66 Dornier 228 70 Dornier 328 74 Dornier 328JET 78 Dornier 728JET 82 de Havilland DHC-6 86 de Havilland DHC-7 90 de Havilland DHC-8 100/200 93 de Havilland DHC-8 300 100 de Havilland DHC-8 400 104 Embraer 120 Brasilia 108 Embraer Regional Jet (ERJ) 135/140/145 112 Embraer Regional Jet (ERJ) 170/175/190/195 121 Metro 124 Fokker 50 128 Fokker 70 132 Let 410/420 136 Saab 340 140 Saab 2000 144 Shorts 330 148 Shorts 360 152 MARKET OVERVIEW Today, we find the regional airline industry emerging as the most dynamic and fastest growing segment in air transportation. What started as a lower tiered ai rline system using old generation propeller aircraft to carry 50 million passengers worldwide in 1982, now ca rries 230 million passengers using state of the art equipment that rivals that of the mainline carriers. The following points of interest are provided by the Regional Airline Association (RAA): U.S. Regional Airlines Passengers (January 1, 2001) * 1 out of every 8 domestic passengers flies on a regional airline. * Regionals operate 1/3 of the commercial fleet. -
2013 Safety Report a Coordinated, Risk-Based Approach to Improving Global Aviation Safety
2013 Safety Report A Coordinated, Risk-based Approach to Improving Global Aviation Safety The air transport industry plays a major role in In every case, these activities are augmented by ICAO’s world economic activity. One of the key elements to detailed appraisal of global and regional aviation safety maintaining the vitality of civil aviation is to ensure metrics on the basis of established risk management safe, secure, efficient and environmentally sustainable principles—a core component of contemporary State operations at the global, regional and national levels. Safety Programmes (SSP) and Safety Management Systems (SMS). Applying these principles in the field A specialized agency of the United Nations, the of aviation safety requires ICAO to pursue a strategy International Civil Aviation Organization (ICAO) comprised of proactive and reactive safety analysis was created in 1944 to promote the safe and orderly and risk management processes. development of international civil aviation throughout the world. In all of its coordinated safety activities, ICAO strives to achieve a balance between assessed risk and the ICAO sets the Standards and Recommended Practices requirements of practical, achievable and effective (SARPs) necessary for aviation safety, security, efficiency risk mitigation strategies. and environmental protection on a global basis. ICAO serves as the primary forum for cooperation in all fields The ICAO Safety Report is published annually each of civil aviation among its 191 Member States.1 April in electronic format to provide updates on safety indicators including accidents and related risk factors Improving the safety of the global air transport system occurring in the previous year. is ICAO’s guiding and most fundamental Strategic Objective.