13. Rigid Body Dynamics II Gerhard Müller University of Rhode Island, [email protected] Creative Commons License
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Spin, the Nutation and the Precession of the Earth's Axis Revisited
The spin, the nutation and the precession of the Earth’s axis revisited The spin, the nutation and the precession of the Earth’s axis revisited: A (numerical) mechanics perspective W. H. M¨uller [email protected] Abstract Mechanical models describing the motion of the Earth’s axis, i.e., its spin, nutation and its precession, have been presented for more than 400 years. Newton himself treated the problem of the precession of the Earth, a.k.a. the precession of the equinoxes, in Liber III, Propositio XXXIX of his Principia [1]. He decomposes the duration of the full precession into a part due to the Sun and another part due to the Moon, to predict a total duration of 26,918 years. This agrees fairly well with the experimentally observed value. However, Newton does not really provide a concise rational derivation of his result. This task was left to Chandrasekhar in Chapter 26 of his annotations to Newton’s book [2] starting from Euler’s equations for the gyroscope and calculating the torques due to the Sun and to the Moon on a tilted spheroidal Earth. These differential equations can be solved approximately in an analytic fashion, yielding Newton’s result. However, they can also be treated numerically by using a Runge-Kutta approach allowing for a study of their general non-linear behavior. This paper will show how and explore the intricacies of the numerical solution. When solving the Euler equations for the aforementioned case numerically it shows that besides the precessional movement of the Earth’s axis there is also a nu- tation present. -

Thomas Precession Is the Basis for the Structure of Matter and Space Preston Guynn
Thomas Precession is the Basis for the Structure of Matter and Space Preston Guynn To cite this version: Preston Guynn. Thomas Precession is the Basis for the Structure of Matter and Space. 2018. hal- 02628032 HAL Id: hal-02628032 https://hal.archives-ouvertes.fr/hal-02628032 Submitted on 26 May 2020 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Thomas Precession is the Basis for the Structure of Matter and Space Einstein's theory of special relativity was incomplete as originally formulated since it did not include the rotational effect described twenty years later by Thomas, now referred to as Thomas precession. Though Thomas precession has been accepted for decades, its relationship to particle structure is a recent discovery, first described in an article titled "Electromagnetic effects and structure of particles due to special relativity". Thomas precession acts as a velocity dependent counter-rotation, so that at a rotation velocity of 3 / 2 c , precession is equal to rotation, resulting in an inertial frame of reference. During the last year and a half significant progress was made in determining further details of the role of Thomas precession in particle structure, fundamental constants, and the galactic rotation velocity. -

Research on the Precession of the Equinoxes and on the Nutation of the Earth’S Axis∗
Research on the Precession of the Equinoxes and on the Nutation of the Earth’s Axis∗ Leonhard Euler† Lemma 1 1. Supposing the earth AEBF (fig. 1) to be spherical and composed of a homogenous substance, if the mass of the earth is denoted by M and its radius CA = CE = a, the moment of inertia of the earth about an arbitrary 2 axis, which passes through its center, will be = 5 Maa. ∗Leonhard Euler, Recherches sur la pr´ecession des equinoxes et sur la nutation de l’axe de la terr,inOpera Omnia, vol. II.30, p. 92-123, originally in M´emoires de l’acad´emie des sciences de Berlin 5 (1749), 1751, p. 289-325. This article is numbered E171 in Enestr¨om’s index of Euler’s work. †Translated by Steven Jones, edited by Robert E. Bradley c 2004 1 Corollary 2. Although the earth may not be spherical, since its figure differs from that of a sphere ever so slightly, we readily understand that its moment of inertia 2 can be nonetheless expressed as 5 Maa. For this expression will not change significantly, whether we let a be its semi-axis or the radius of its equator. Remark 3. Here we should recall that the moment of inertia of an arbitrary body with respect to a given axis about which it revolves is that which results from multiplying each particle of the body by the square of its distance to the axis, and summing all these elementary products. Consequently this sum will give that which we are calling the moment of inertia of the body around this axis. -

The Rotating Reference Frame and the Precession of the Equinoxes
The rotating reference frame and the precession of the equinoxes Adrián G. Cornejo Electronics and Communications Engineering from Universidad Iberoamericana, Calle Santa Rosa 719, CP 76138, Col. Santa Mónica, Querétaro, Querétaro, Mexico. E-mail: [email protected] (Received 7 August 2013, accepted 27 December 2013) Abstract In this paper, angular frequency of a rotating reference frame is derived, where a given body orbiting and rotating around a fixed axis describes a periodical rosette path completing a periodical “circular motion”. Thus, by the analogy between a rotating frame of reference and the whole Solar System, angular frequency and period of a possible planetary circular motion are calculated. For the Earth's case, the circular period is calculated from motion of the orbit by the rotation effect, together with the advancing caused by the apsidal precession, which results the same amount than the period of precession of the equinoxes. This coincidence could provide an alternative explanation for this observed effect. Keywords: Rotating reference frame, Lagranian mechanics, Angular frequency, Precession of the equinoxes. Resumen En este trabajo, se deriva la frecuencia angular de un marco de referencia rotante, donde un cuerpo dado orbitando y rotando alrededor de un eje fijo describe una trayectoria en forma de una roseta periódica completando un “movimiento circular” periódico. Así, por la analogía entre un marco de referencia rotacional y el Sistema Solar como un todo, se calculan la frecuencia angular y el periodo de un posible movimiento circular planetario. Para el caso de la Tierra, el periodo circular es calculado a partir del movimiento de la órbita por el efecto de la rotación, junto con el avance causado por la precesión absidal, resultando el mismo valor que el periodo de la precesión de los equinoccios. -

3D Rigid Body Dynamics: Tops and Gyroscopes
J. Peraire, S. Widnall 16.07 Dynamics Fall 2008 Version 2.0 Lecture L30 - 3D Rigid Body Dynamics: Tops and Gyroscopes 3D Rigid Body Dynamics: Euler Equations in Euler Angles In lecture 29, we introduced the Euler angles as a framework for formulating and solving the equations for conservation of angular momentum. We applied this framework to the free-body motion of a symmetrical body whose angular momentum vector was not aligned with a principal axis. The angular moment was however constant. We now apply Euler angles and Euler’s equations to a slightly more general case, a top or gyroscope in the presence of gravity. We consider a top rotating about a fixed point O on a flat plane in the presence of gravity. Unlike our previous example of free-body motion, the angular momentum vector is not aligned with the Z axis, but precesses about the Z axis due to the applied moment. Whether we take the origin at the center of mass G or the fixed point O, the applied moment about the x axis is Mx = MgzGsinθ, where zG is the distance to the center of mass.. Initially, we shall not assume steady motion, but will develop Euler’s equations in the Euler angle variables ψ (spin), φ (precession) and θ (nutation). 1 Referring to the figure showing the Euler angles, and referring to our study of free-body motion, we have the following relationships between the angular velocities along the x, y, z axes and the time rate of change of the Euler angles. The angular velocity vectors for θ˙, φ˙ and ψ˙ are shown in the figure. -

Is the Precession of Mercury's Perihelion a Natural (Non-Relativistic) Phenomenon?
The Proceedings of the International Conference on Creationism Volume 1 Print Reference: Volume 1:II, Page 175-186 Article 46 1986 Is the Precession of Mercury's Perihelion a Natural (Non- Relativistic) Phenomenon? Francisco Salvador Ramirez Avila ACCTRA Follow this and additional works at: https://digitalcommons.cedarville.edu/icc_proceedings DigitalCommons@Cedarville provides a publication platform for fully open access journals, which means that all articles are available on the Internet to all users immediately upon publication. However, the opinions and sentiments expressed by the authors of articles published in our journals do not necessarily indicate the endorsement or reflect the views of DigitalCommons@Cedarville, the Centennial Library, or Cedarville University and its employees. The authors are solely responsible for the content of their work. Please address questions to [email protected]. Browse the contents of this volume of The Proceedings of the International Conference on Creationism. Recommended Citation Ramirez Avila, Francisco Salvador (1986) "Is the Precession of Mercury's Perihelion a Natural (Non- Relativistic) Phenomenon?," The Proceedings of the International Conference on Creationism: Vol. 1 , Article 46. Available at: https://digitalcommons.cedarville.edu/icc_proceedings/vol1/iss1/46 IS THE PRECESSION OF MERCURY'S PERIHELION A NATURAL (NON-RELATIVISTIC) PHENOMENON? Francisco Salvador Ramirez Avila IV ACCTRA C. Geronimo Antonio Gil No. 13 Cd. Juarez Chih.. Mexico, C.P. 32340 ABSTRACT The general theory of relativity claims that the excess of precession of the planetary orbits has its origin in the curvature of space-time produced by the Sun in its near vicin ity. In general relativity, gravity is thought to be a measure of the curvature of space- time when matter is present. -

Astronomy 113 Laboratory Manual
UNIVERSITY OF WISCONSIN - MADISON Department of Astronomy Astronomy 113 Laboratory Manual Fall 2011 Professor: Snezana Stanimirovic 4514 Sterling Hall [email protected] TA: Natalie Gosnell 6283B Chamberlin Hall [email protected] 1 2 Contents Introduction 1 Celestial Rhythms: An Introduction to the Sky 2 The Moons of Jupiter 3 Telescopes 4 The Distances to the Stars 5 The Sun 6 Spectral Classification 7 The Universe circa 1900 8 The Expansion of the Universe 3 ASTRONOMY 113 Laboratory Introduction Astronomy 113 is a hands-on tour of the visible universe through computer simulated and experimental exploration. During the 14 lab sessions, we will encounter objects located in our own solar system, stars filling the Milky Way, and objects located much further away in the far reaches of space. Astronomy is an observational science, as opposed to most of the rest of physics, which is experimental in nature. Astronomers cannot create a star in the lab and study it, walk around it, change it, or explode it. Astronomers can only observe the sky as it is, and from their observations deduce models of the universe and its contents. They cannot ever repeat the same experiment twice with exactly the same parameters and conditions. Remember this as the universe is laid out before you in Astronomy 113 – the story always begins with only points of light in the sky. From this perspective, our understanding of the universe is truly one of the greatest intellectual challenges and achievements of mankind. The exploration of the universe is also a lot of fun, an experience that is largely missed sitting in a lecture hall or doing homework. -

Lense-Thirring Precession in Strong Gravitational Fields
1 Lense-Thirring Precession in Strong Gravitational Fields Chandrachur Chakraborty Tata Institute of Fundamental Research, Mumbai 400005, India Abstract The exact frame-dragging (or Lense-Thirring (LT) precession) rates for Kerr, Kerr-Taub-NUT (KTN) and Taub-NUT spacetimes have been derived. Remarkably, in the case of the ‘zero an- gular momentum’ Taub-NUT spacetime, the frame-dragging effect is shown not to vanish, when considered for spinning test gyroscope. In the case of the interior of the pulsars, the exact frame- dragging rate monotonically decreases from the center to the surface along the pole and but it shows an ‘anomaly’ along the equator. Moving from the equator to the pole, it is observed that this ‘anomaly’ disappears after crossing a critical angle. The ‘same’ anomaly can also be found in the KTN spacetime. The resemblance of the anomalous LT precessions in the KTN spacetimes and the spacetime of the pulsars could be used to identify a role of Taub-NUT solutions in the astrophysical observations or equivalently, a signature of the existence of NUT charge in the pulsars. 1 Introduction Stationary spacetimes with angular momentum (rotation) are known to exhibit an effect called Lense- Thirring (LT) precession whereby locally inertial frames are dragged along the rotating spacetime, making any test gyroscope in such spacetimes precess with a certain frequency called the LT precession frequency [1]. This frequency has been shown to decay as the inverse cube of the distance of the test gyroscope from the source for large enough distances where curvature effects are small, and known to be proportional to the angular momentum of the source. -
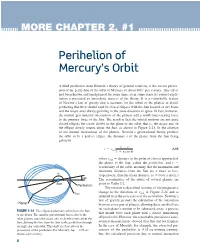
Perihelion of Mercury's Orbit
MORE CHAPTER 2, #1 Perihelion of Mercury’s Orbit A third prediction from Einstein’s theory of general relativity is the excess preces- sion of the perihelion of the orbit of Mercury of about 0.01° per century. This effect had been known and unexplained for some time, so in some sense its correct expla- nation represented an immediate success of the theory. It is a remarkable feature of Newton’s law of gravity that it accounts for the orbits of the planets in detail, predicting that they should each be closed ellipses with the Sun located at one focus and the major axes always pointing in the same direction in space. In fact, however, the mutual gravitational interactions of the planets add a small time-varying force to the primary force of the Sun. The result is that the orbital motions are not quite closed ellipses but rotate slowly in the plane of the orbit; that is, the major axis of the ellipse slowly rotates about the Sun, as shown in Figure 2-21. In the absence of the mutual interactions of the planets, Newton’s gravitational theory predicts the orbit to be a perfect ellipse, the distance r of the planet from the Sun being given by 1 + r = r 2-55 min1 + cos ϭ where rmin distance to the point of closest approach of the planet to the Sun, called the perihelion, and ϭ eccentricity of the orbit, meaning that the maximum and φ minimum distances from the Sun are more or less, respectively, than the mean distance. -

This Restless Globe
www.astrosociety.org/uitc No. 45 - Winter 1999 © 1999, Astronomical Society of the Pacific, 390 Ashton Avenue, San Francisco, CA 94112. This Restless Globe A Look at the Motions of the Earth in Space and How They Are Changing by Donald V. Etz The Major Motions of the Earth How These Motions Are Changing The Orientation of the Earth in Space The Earth's Orbit Precession in Human History The Motions of the Earth and the Climate Conclusion Our restless globe and its companion. While heading out for The Greek philosopher Heraclitus of Ephesus, said 2500 years ago that the its rendezvous with Jupiter, a camera on NASA's Galileo perceptible world is always changing. spacecraft snapped this 1992 image of Earth and its Moon. The Heraclitus was not mainstream, of course. Among his contemporaries were terminator, or line between night and day, is clearly visible on the philosophers like Zeno of Elea, who used his famous paradoxes to argue that two worlds. Image courtesy of change and motion are logically impossible. And Aristotle, much admired in NASA. ancient Greece and Rome, and the ultimate authority in medieval Europe, declared "...the earth does not move..." We today know that Heraclitus was right, Aristotle was wrong, and Zeno...was a philosopher. Everything in the heavens moves, from the Earth on which we ride to the stars in the most distant galaxies. As James B. Kaler has pointed out in The Ever-Changing Sky: "The astronomer quickly learns that nothing is truly stationary. There are no fixed reference frames..." The Earth's motions in space establish our basic units of time measurement and the yearly cycle of the seasons. -

Precession of Earth WS.Pdf
Precession of Earth: Spinning on the Axis Environmental Science Name: ____________________________________________Period:__________ Date: ___________ Essential Question: Why is earth’s axis wobbling? Een 1.1.1 Instructions: Study the selection and answer the questions. Just like a toy top that wobbles before it falls, the Earth wobbles as it rotates on its axis, the imaginary line that extends through the poles. This wobbling motion is due to the slight bulge at the equator. If you traced the Earth's axis out into space, you would see the extension of the axis slowly tracing a cone shape. The wobble is very slow; it takes the Earth 26,000 years to trace one complete conical shape. This wobbling motion of Earth on its axis is called precession. Because of precession, Polaris and Vega alternate as the North Star every 13,000 years. Polaris: The Current North Star Today the Earth's axis points within one degree of Polaris, the brightest star in the constellation Ursa Minor (also called the Little Bear or the Little Dipper). Polaris appears to be in a fixed position in the sky throughout the year. All other stars and constellations seem to revolve around the North Star. Why isn't the North Star Fixed? Over the course of time, the North Star changes. Right now Polaris is within one degree of true north, but at other times the North Star has been and will again be Thuban (the brightest star in the constellation Draco), Vega (the brightest star in the constellation Lyra), and Alpha Cephei (the brightest star in the constellation Cepheus). -

A Astronomical Terminology
A Astronomical Terminology A:1 Introduction When we discover a new type of astronomical entity on an optical image of the sky or in a radio-astronomical record, we refer to it as a new object. It need not be a star. It might be a galaxy, a planet, or perhaps a cloud of interstellar matter. The word “object” is convenient because it allows us to discuss the entity before its true character is established. Astronomy seeks to provide an accurate description of all natural objects beyond the Earth’s atmosphere. From time to time the brightness of an object may change, or its color might become altered, or else it might go through some other kind of transition. We then talk about the occurrence of an event. Astrophysics attempts to explain the sequence of events that mark the evolution of astronomical objects. A great variety of different objects populate the Universe. Three of these concern us most immediately in everyday life: the Sun that lights our atmosphere during the day and establishes the moderate temperatures needed for the existence of life, the Earth that forms our habitat, and the Moon that occasionally lights the night sky. Fainter, but far more numerous, are the stars that we can only see after the Sun has set. The objects nearest to us in space comprise the Solar System. They form a grav- itationally bound group orbiting a common center of mass. The Sun is the one star that we can study in great detail and at close range. Ultimately it may reveal pre- cisely what nuclear processes take place in its center and just how a star derives its energy.