The Use of SONAR to Measure Ice Thickness
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

River Ice Management in North America
RIVER ICE MANAGEMENT IN NORTH AMERICA REPORT 2015:202 HYDRO POWER River ice management in North America MARCEL PAUL RAYMOND ENERGIE SYLVAIN ROBERT ISBN 978-91-7673-202-1 | © 2015 ENERGIFORSK Energiforsk AB | Phone: 08-677 25 30 | E-mail: [email protected] | www.energiforsk.se RIVER ICE MANAGEMENT IN NORTH AMERICA Foreword This report describes the most used ice control practices applied to hydroelectric generation in North America, with a special emphasis on practical considerations. The subjects covered include the control of ice cover formation and decay, ice jamming, frazil ice at the water intakes, and their impact on the optimization of power generation and on the riparians. This report was prepared by Marcel Paul Raymond Energie for the benefit of HUVA - Energiforsk’s working group for hydrological development. HUVA incorporates R&D- projects, surveys, education, seminars and standardization. The following are delegates in the HUVA-group: Peter Calla, Vattenregleringsföretagen (ordf.) Björn Norell, Vattenregleringsföretagen Stefan Busse, E.ON Vattenkraft Johan E. Andersson, Fortum Emma Wikner, Statkraft Knut Sand, Statkraft Susanne Nyström, Vattenfall Mikael Sundby, Vattenfall Lars Pettersson, Skellefteälvens vattenregleringsföretag Cristian Andersson, Energiforsk E.ON Vattenkraft Sverige AB, Fortum Generation AB, Holmen Energi AB, Jämtkraft AB, Karlstads Energi AB, Skellefteå Kraft AB, Sollefteåforsens AB, Statkraft Sverige AB, Umeå Energi AB and Vattenfall Vattenkraft AB partivipates in HUVA. Stockholm, November 2015 Cristian -
Airplane Icing
Federal Aviation Administration Airplane Icing Accidents That Shaped Our Safety Regulations Presented to: AE598 UW Aerospace Engineering Colloquium By: Don Stimson, Federal Aviation Administration Topics Icing Basics Certification Requirements Ice Protection Systems Some Icing Generalizations Notable Accidents/Resulting Safety Actions Readings – For More Information AE598 UW Aerospace Engineering Colloquium Federal Aviation 2 March 10, 2014 Administration Icing Basics How does icing occur? Cold object (airplane surface) Supercooled water drops Water drops in a liquid state below the freezing point Most often in stratiform and cumuliform clouds The airplane surface provides a place for the supercooled water drops to crystalize and form ice AE598 UW Aerospace Engineering Colloquium Federal Aviation 3 March 10, 2014 Administration Icing Basics Important Parameters Atmosphere Liquid Water Content and Size of Cloud Drop Size and Distribution Temperature Airplane Collection Efficiency Speed/Configuration/Temperature AE598 UW Aerospace Engineering Colloquium Federal Aviation 4 March 10, 2014 Administration Icing Basics Cloud Characteristics Liquid water content is generally a function of temperature and drop size The colder the cloud, the more ice crystals predominate rather than supercooled water Highest water content near 0º C; below -40º C there is negligible water content Larger drops tend to precipitate out, so liquid water content tends to be greater at smaller drop sizes The average liquid water content decreases with horizontal -
Overview of Icing Research at NASA Glenn
Overview of Icing Research at NASA Glenn Eric Kreeger NASA Glenn Research Center Icing Branch 25 February, 2013 Glenn Research Center at Lewis Field Outline • The Icing Problem • Types of Ice • Icing Effects on Aircraft Performance • Icing Research Facilities • Icing Codes Glenn Research Center at Lewis Field 2 Aircraft Icing Ground Icing Ice build-up results in significant changes to the aerodynamics of the vehicle This degrades the performance and controllability of the aircraft In-Flight Icing Glenn Research Center at Lewis Field 3 3 Aircraft Icing During an in-flight encounter with icing conditions, ice can build up on all unprotected surfaces. Glenn Research Center at Lewis Field 4 Recent Commercial Aircraft Accidents • ATR-72: Roselawn, IN; October 1994 – 68 fatalities, hull loss – NTSB findings: probable cause of accident was aileron hinge moment reversal due to an ice ridge that formed aft of the protected areas • EMB-120: Monroe, MI; January 1997 – 29 fatalities, hull loss – NTSB findings: probable cause of accident was loss-of-control due to ice contaminated wing stall • EMB-120: West Palm Beach, FL; March 2001 – 0 fatalities, no hull loss, significant damage to wing control surfaces – NTSB findings: probable cause was loss-of-control due to increased stall speeds while operating in icing conditions (8K feet altitude loss prior to recovery) • Bombardier DHC-8-400: Clarence Center, NY; February 2009 – 50 fatalities, hull loss – NTSB findings: probable cause was captain’s inappropriate response to icing condition 5 Glenn Research -

High-Throughput Sequencing of Fungal Communities Across the Perennial Ice Block of Scărisoara̦ Ice Cave
Annals of Glaciology 59(77) 2018 doi: 10.1017/aog.2019.6 134 © The Author(s) 2019. This is an Open Access article, distributed under the terms of the Creative Commons Attribution-NonCommercial-ShareAlike licence (http://creativecommons.org/licenses/by-nc-sa/4.0/), which permits non-commercial re-use, distribution, and reproduction in any medium, provided the same Creative Commons licence is included and the original work is properly cited. The written permission of Cambridge University Press must be obtained for commercial re-use. High-throughput sequencing of fungal communities across the perennial ice block of Scărisoara̦ Ice Cave Antonio MONDINI,1 Johanna DONHAUSER,2 Corina ITCUS,1 Constantin MARIN,3 Aurel PERȘOIU,1,4,5 Paris LAVIN,6,7 Beat FREY,2 Cristina PURCAREA1 1Department of Microbiology, Institute of Biology, Bucharest, Romania E-mail: [email protected] 2Swiss Federal Research Institute WSL, Birmensdorf, Switzerland 3Emil Racovita Institute of Speleology, Bucharest, Romania 4Stable Isotope Laboratory, Ștefan cel Mare University, Suceava, Romania 5Emil Racovită̦Institute of Speleology, Cluj-Napoca, Romania 6Laboratorio de Complejidad Microbiana y Ecología Funcional, Instituto Antofagasta, Universidad de Antofagasta, Antofagasta, Chile 7Departamento de Biotecnología, Facultad de Ciencias del Mar y Recursos Biológicos, Universidad de Antofagasta, Antofagasta, Chile ABSTRACT. This survey presents the first high-throughput characterisation of fungal distribution based on ITS2 Illumina sequencing of uncultured microbiome from a 1500 years old perennial ice deposit in Scărisoara̦ Ice Cave, Romania. Of the total of 1 751 957 ITS2 sequences, 64% corresponded to 182 fungal operational taxonomic units, showing a low diversity, particularly in older ice strata, and a distinct temporal distribution pattern. -
Preventing Ice Dams
{Property} Preventing Ice Dams waterWhat CAU Recommends: Introduction > Clean rain gutters annually to Ice dams represent a costly (and potentially remove obstructions that can dangerous) hazard for property owners and block the flow of water from community associations. Even worse, once a the roof building has shown itself to be susceptible to ice > Inspect attic insulation and dams, it is more likely to keep developing them ventilation during future cold weather. > Install ice shields or other waterproof membranes The majority of ice dams form as a ridge of ice beneath the roof covering along a rain gutter and roof eave. As ice builds during roof replacement up, it creates an unintended dam that prevents projects melting snow from draining off of the roof. Some > Locate a contractor that can can be very easy to see, but others form around clear ice dams from your skylights, chimneys, and other features that make buildings them harder to detect from the ground. Need More Information? Whether they are visible or not, ice dams can Additional information relating cause significant damage to a building or unit. to ice dam prevention is That’s because water that pools up behind it can available from The Institute find its way under the roof and into the structure for Business and Home Safety and the interior of a home. It isn’t unusual for (www.disastersafety.org) or by ice dams to cause damage to insulation, wall contacting CAU’s Loss Control interiors, ceiling finishes, and trim. Exterior Department. damage to roofs, gutters, and spaces below an ice dam (like windows and landscaping) is also common. -

Water Rescue Ice Rescue Training
Ice Rescue Know the Ice Ice Formation: Cold air cools surface of the water. As the surface water cools it becomes more dense and sinks—being replaced by the less dense and warmer water. This thermal inversion continues until the water is a consistent 39 degrees. At this point the water no longer becomes dense as it gets colder. The cold air continues to cool the water surface until the temperature is sufficient to create ice. Ice expands 9% as it is converted from water. It is therefore less dense and floats. Types of Ice: • Frazil - thin layers of new ice in disc shapes—very weak. • Clear Ice - New, Strong Ice • Snow Ice - Formed from refrozen snow, murky, porous--weak • Layer Ice - Layers of snow and other forms of ice, refrozen—weak • Anchor Ice - Form on very cold river bottoms and then releases with the warmth of the sun. • Pack Ice - Broken pieces of Ice, blown together and frozen in place. Will have holes and weak spots. Ice Strength: Thickness is only one factor in judging the strength of Ice. The formula for calculating the strength of Clear Ice is: Strength = 50 x thickness squared. (S = 50Tsq.) or 2" will support 200 lbs, 4" will support 800 lbs. Remember that Ice will be thickest near to shore. If you measure 3" at shore, count on losing at least an inch of ice as you move to deeper water. Other factors affecting ice: • Snow on Ice - can insulate Ice from the cold air. Warmer water below the ice may help it deteriorate. -
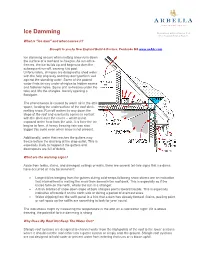
Ice Damming Reproduced with Permission from New England Build & Restore
Ice Damming Reproduced with permission from New England Build & Restore. What is "ice dam" and what causes it? Brought to you by New England Build & Restore, Pembroke MA www.neAbr.com Ice damming occurs when melting snow runs down the surface of a roof and re-freezes. As run-off re- freezes, the ice builds up and begins to dam the subsequent run-off, causing it to pool. Unfortunately, shingles are designed to shed water with the help of gravity and they don’t perform well against the standing water. Some of the pooled water finds its way under shingles to hidden seams and fastener holes. Some of it re-freezes under the tabs and lifts the shingles, literally opening a floodgate. The phenomenon is caused by warm air in the attic space, heating the undersurface of the roof deck, melting snow. Run-off makes its way down the slope of the roof and eventually comes in contact with the deck over the eaves -- which is not exposed to the heat from the attic. It is here the ice begins to form. A heavy freezing rain can also trigger this cycle even when snow is not present. Additionally, water that reaches the gutters may freeze before the draining at the drop outlet. This is especially likely to happen if the gutters and downspouts are full of debris. What are the warning signs? Aside from leaks, stains, and damaged ceilings or walls, there are several tell-tale signs that ice dams have occurred or may be imminent: • Large icicles hanging from the gutters during cold-snaps following snow storms are an indication that internal heat is melting the snow from beneath the roof deck. -

California 94025 Observations of Iceberg Rafting In
Notes and Discussions A. THOMAS OVENSHINE U.S. Geological Sumy, Menlo Par/(, California 94025 Observations of Iceberg Rafting in Glacier Bay, Alaska, and the Identification of Ancient Ice-Rafted Deposits ABSTRACT Observations of icebergs in a modern glacial originally disseminated fine sediment. Thus when marine environment indicate that ancient rocks freed by melting and deposited by iceberg rafting, that received iceberg-rafted material should con- the pellets would reliably indicate the presence of tain: (1) local concentrations of stones that origi- glacial ice in an ancient environment. In the nated when icebergs overturned, and (2) small Gowganda Formation, a Precambnan glacial de- pellets of till that were originally sediment filling posit, strata that contain outsized, presumably the spaces between clear ice crystals. iceberg-rafted stones also contain abundant small The till pellets are especially significant in iden- flattened clasts of unsorted graywacke interpreted tifying an ancient glacial setting because they as the lithified counterparts of the till pellets ob- originate through a process unique to glaciers—the served on modern icebergs. flow- and recrystallization-mduced segregation of INTRODUCTION THE ICEBERG-RAFTING PROCESS In recent years, geologists have discussed Icebergs up to several hundred feet long which features of sedimentary rocks reliably form when tidal glaciers calve into the fiord indicate that glaciers existed in or near an waterways of Glacier Bay. For several hours ancient depositional basin (see Harland and after calving, the bergs fragment and turn over others, 1966, for a review). Some have con- in the water until the resulting solid chunks of cluded that finely laminated sediments con- glacier ice attain a stable position. -

Chapter 19. Antarctic Sea Ice and Icebergs
Chapter 19. Antarctic Sea Ice and Icebergs Robert G. Onstott General Dynamics - Advanced Information Systems, Ann Arbor, MI, USA 19.1 Introduction The monitoring of floating ice in the Southern Ocean is of great interest because of its vast winter extent and the scale of its retreat during summer. With a winter extent that is about 20% greater than that in the Northern Hemisphere, Southern Ocean sea ice plays an important role in the global energy balance. In addition, the icebergs that calve from the Antarctic ice shelves and glacier tongues may initially be the size of a small state (e.g., 400 to 11,000 km2), and, frequently produce many smaller icebergs that may become deadly marine hazards. Icebergs are also a source of fresh water to the world’s oceans. There are important differences between the northern and southern polar oceans that affect sea ice conditions, and sea ice physical and microwave properties. In the Southern Ocean, sea ice is bounded on the south by the Antarctic continent, whereas to the north there is no land boundary. Ice formation regions extend north from the Antarctic coastline for hundreds of kilometers. In addition, the ocean around the Antarctic continent is essentially obstruction-free for hundreds of kilometers beyond the ice edge. Storms are frequent in the Southern Hemisphere and swell waves of significant height form in the open ocean and propagate into the Antarctic sea ice zone. Katabatic winds form because cold and dense air is pulled from high elevations to the coast by gravity. These winds flow off of this very cold continent over the ocean surface, are very strong, and may persist for long periods (e.g., days). -
Glacier Clear Ice Bands Indicate Englacial Channel Microbial Distribution
Portland State University PDXScholar Geology Faculty Publications and Presentations Geology 3-22-2021 Glacier Clear Ice Bands Indicate Englacial Channel Microbial Distribution Gilda Varliero University of Bristol Alexandra Holland University of Bristol Gary L. A. Barker University of Bristol Marian L. Yallop University of Bristol Andrew G. Fountain Portland State University, [email protected] See next page for additional authors Follow this and additional works at: https://pdxscholar.library.pdx.edu/geology_fac Part of the Geology Commons, and the Glaciology Commons Let us know how access to this document benefits ou.y Citation Details Varliero, G., Holland, A., Barker, G., Yallop, M., Fountain, A., & Anesio, A. (2021). Glacier clear ice bands indicate englacial channel microbial distribution. Journal of Glaciology, 1-13. doi:10.1017/jog.2021.30 This Article is brought to you for free and open access. It has been accepted for inclusion in Geology Faculty Publications and Presentations by an authorized administrator of PDXScholar. Please contact us if we can make this document more accessible: [email protected]. Authors Gilda Varliero, Alexandra Holland, Gary L. A. Barker, Marian L. Yallop, Andrew G. Fountain, and Alexandre M. Anesio This article is available at PDXScholar: https://pdxscholar.library.pdx.edu/geology_fac/195 Journal of Glaciology Glacier clear ice bands indicate englacial channel microbial distribution Gilda Varliero1, Alexandra Holland2, Gary L. A. Barker1, Marian L. Yallop1, 3 4 Article Andrew G. Fountain and Alexandre M. Anesio 1 2 Cite this article: Varliero G, Holland A, Barker School of Life Sciences, University of Bristol, Bristol, UK; Bristol Glaciology Centre, School of Geographical GLA, Yallop ML, Fountain AG, Anesio AM (2021). -

Icebergs and Iceberg Rafted Detritus (IRD) in the North Atlantic: Facts and Assumptions
REGULAR ISSUE Icebergs and iceberg rafted detritus (IRD) in the North Atlantic: facts and assumptions John T. Andrews University ~ Colorado • Bouldel, Colorado USA Abstract Over the last decade considerable attention has been of IRD varies, e.g. Molnia, 1972; Ruddiman, 1977; Bond given to evidence for the iceberg rafting of sediments and Lotti, 1995). into the North Atlantic, especially during Heinrich (H) Glacially transported sediments (striated clasts and events (presumed to be associated with short-lived, far-travelled erratics) were first described in detail from abrupt intervals of increased iceberg and meltwater marine sediments in the North Atlantic by Bramlette flux). However, our knowledge of the present sediment and Bradley (1940). Little came from these investiga- distribution within icebergs and the fate of this sedi- tions until the 1970s (cf. Molnia, 1972) when downcore ment during iceberg drift is rudimentary. Debris is usu- changes in IRD were computed as fluxes over intervals ally concentrated in a 1 3 m layer at the base of a glacier associated with Marine Isotope Stages 1 to 5 (approxi- ; if present in calved icebergs, this layer is rapidly melt- mately the last 130 ka) (Ruddiman, 1977). Subsequently, ed within a few 10s to 100s of km from an ice margin. Heinrich (1988) systematically counted the numbers of Ice rafted debris (IRD) is frequently characterized by lithic clasts and foraminifera in a series of cores west of the weight percentage or counts of mineral grains Portugal, and showed that the percentages of lithics > within certain size fractions (i.e. > 63, > 250 Fun, etc.) 180 pm in these cores represented a series of IRD events. -

Determining the Effects of Hailstone Impact on Flat Cold-Reduced Steel Roof Sheeting
University of Wollongong Research Online University of Wollongong Thesis Collection 2017+ University of Wollongong Thesis Collections 2018 Determining the Effects of Hailstone Impact on Flat Cold-Reduced Steel Roof Sheeting Yufei Wu University of Wollongong Follow this and additional works at: https://ro.uow.edu.au/theses1 University of Wollongong Copyright Warning You may print or download ONE copy of this document for the purpose of your own research or study. The University does not authorise you to copy, communicate or otherwise make available electronically to any other person any copyright material contained on this site. You are reminded of the following: This work is copyright. Apart from any use permitted under the Copyright Act 1968, no part of this work may be reproduced by any process, nor may any other exclusive right be exercised, without the permission of the author. Copyright owners are entitled to take legal action against persons who infringe their copyright. A reproduction of material that is protected by copyright may be a copyright infringement. A court may impose penalties and award damages in relation to offences and infringements relating to copyright material. Higher penalties may apply, and higher damages may be awarded, for offences and infringements involving the conversion of material into digital or electronic form. Unless otherwise indicated, the views expressed in this thesis are those of the author and do not necessarily represent the views of the University of Wollongong. Recommended Citation Wu, Yufei, Determining the Effects of Hailstone Impact on Flat Cold-Reduced Steel Roof Sheeting, Master of Philosophy thesis, School of Civil, Mining and Environmental Engineering, University of Wollongong, 2018.