Lecture Notes
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

An Introduction to the Ising Model Barry A. Cipra the American
An Introduction to the Ising Model Barry A. Cipra The American Mathematical Monthly, Vol. 94, No. 10. (Dec., 1987), pp. 937-959. Stable URL: http://links.jstor.org/sici?sici=0002-9890%28198712%2994%3A10%3C937%3AAITTIM%3E2.0.CO%3B2-V The American Mathematical Monthly is currently published by Mathematical Association of America. Your use of the JSTOR archive indicates your acceptance of JSTOR's Terms and Conditions of Use, available at http://www.jstor.org/about/terms.html. JSTOR's Terms and Conditions of Use provides, in part, that unless you have obtained prior permission, you may not download an entire issue of a journal or multiple copies of articles, and you may use content in the JSTOR archive only for your personal, non-commercial use. Please contact the publisher regarding any further use of this work. Publisher contact information may be obtained at http://www.jstor.org/journals/maa.html. Each copy of any part of a JSTOR transmission must contain the same copyright notice that appears on the screen or printed page of such transmission. JSTOR is an independent not-for-profit organization dedicated to and preserving a digital archive of scholarly journals. For more information regarding JSTOR, please contact [email protected]. http://www.jstor.org Mon Apr 30 12:49:36 2007 An Introduction to the Ising Model BARRYA. CIPRA,St. Olu/College, Northfield, Minnesotu 55057 Burry Cipru received a Ph.D, in mathematics from the University of Maryland in 1980. He has been an instructor at M.I.T. and at the Ohio State University, and is currently an assistant professor of mathematics at St. -

A New Look on the Two-Dimensional Ising Model: Thermal Artificial Spins
Home Search Collections Journals About Contact us My IOPscience A new look on the two-dimensional Ising model: thermal artificial spins This content has been downloaded from IOPscience. Please scroll down to see the full text. 2016 New J. Phys. 18 023008 (http://iopscience.iop.org/1367-2630/18/2/023008) View the table of contents for this issue, or go to the journal homepage for more Download details: IP Address: 130.238.169.108 This content was downloaded on 04/05/2016 at 14:41 Please note that terms and conditions apply. New J. Phys. 18 (2016) 023008 doi:10.1088/1367-2630/18/2/023008 PAPER A new look on the two-dimensional Ising model: thermal artificial OPEN ACCESS spins RECEIVED 29 October 2015 Unnar B Arnalds1, Jonathan Chico2, Henry Stopfel2, Vassilios Kapaklis2, Oliver Bärenbold2, REVISED Marc A Verschuuren3, Ulrike Wolff4, Volker Neu4, Anders Bergman2 and Björgvin Hjörvarsson2 14 December 2015 1 Science Institute, University of Iceland, Dunhaga 3, IS-107 Reykjavik, Iceland ACCEPTED FOR PUBLICATION 2 7 January 2016 Department of Physics and Astronomy, Uppsala University, SE-75120 Uppsala, Sweden 3 Philips Research Laboratories, Eindhoven, The Netherlands PUBLISHED 4 IFW Dresden, Institute of Metallic Materials, D-01171 Dresden, Germany 29 January 2016 E-mail: [email protected] Original content from this Keywords: magnetic ordering, artificial spins, Ising model work may be used under the terms of the Creative Supplementary material for this article is available online Commons Attribution 3.0 licence. Any further distribution of this work must maintain Abstract attribution to the author(s) and the title of We present a direct experimental investigation of the thermal ordering in an artificial analogue of an the work, journal citation and DOI. -

The Fate of Ernst Ising and the Fate of His Model
The Fate of Ernst Ising and the Fate of his Model Ising, T, Folk, R, Kenna, R, Berche, B & Holovatch, Y Published PDF deposited in Coventry University’s Repository Original citation: Ising, T, Folk, R, Kenna, R, Berche, B & Holovatch, Y 2017, 'The Fate of Ernst Ising and the Fate of his Model' Journal of Physical Studies, vol 21, no. 3, 3002. http://physics.lnu.edu.ua/jps/2017/3/abs/a3002-19.html ISSN 1027-4642 ESSN 2310-0052 Publisher: National University of Lviv Copyright © and Moral Rights are retained by the author(s) and/ or other copyright owners. A copy can be downloaded for personal non-commercial research or study, without prior permission or charge. This item cannot be reproduced or quoted extensively from without first obtaining permission in writing from the copyright holder(s). The content must not be changed in any way or sold commercially in any format or medium without the formal permission of the copyright holders. ЖУРНАЛ ФIЗИЧНИХ ДОСЛIДЖЕНЬ JOURNAL OF PHYSICAL STUDIES т. 21, № 3 (2017) 3002(19 ñ.) v. 21, No. 3 (2017) 3002(19 p.) THE FATE OF ERNST ISING AND THE FATE OF HIS MODEL∗ T. Ising1, R. Folk2, R. Kenna3;1, B. Berche4;1, Yu. Holovatch5;1 1 L4 Collaboration & Doctoral College for the Statistical Physics of Complex Systems, Leipzig-Lorraine-Lviv-Coventry 2 Institute for Theoretical Physics, Johannes Kepler University Linz, A-4040, Linz, Austria 3Applied Mathematics Research Centre, Coventry University, Coventry, CV1 5FB, United Kingdom 4Statistical Physics Group, Laboratoire de Physique et Chimie Th´eoriques, Universit´e de Lorraine, F-54506 Vandœuvre-les-Nancy Cedex, France 5Institute for Condensed Matter Physics, National Acad. -
Ising Model of Ferromagnetism
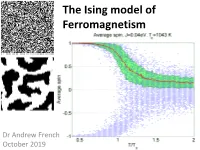
The Ising model of Ferromagnetism Dr Andrew French October 2019 The Ising Model of Ferromagnetism All atoms will respond in some fashion to magnetic fields. The angular momentum (and spin) properties of electrons imply a circulating charge, which means they will be subject to a Lorentz force in a magnetic field. However the effects of diamagnetism, paramagnetism and anti-ferromagnetism are typically very small. Ferromagnetic materials (iron, cobalt, nickel, some rare earth metal compounds) respond strongly to magnetic fields and can intensify them by orders of magnitude. i.e. the relative permeability can be tens or hundreds, or possibly thousands. The Ising model is a simplified model of a ferromagnet which exhibits a phase transition above the Curie temperature. Below this, magnetic dipole alignment will tend to cluster into domains, and its is these micro-scale groupings which give rise to ferromagnetic behaviour. Ernst Ising (1900-1998) “Soft” magnetism - Ferromagnets Unlike permanent “hard” magnets, once the applied field is removed, the domain alignment will randomize again, effectively zeroing the net magnetism. Magnetic domains The Ising model can be used to demonstrate spontaneous mass alignment of magnetic dipoles, and possibly a mechanism for domain formation. Perhaps the simplest model which yields characteristic behaviour is an N x N square grid, where each square is initially randomly assigned a +1 or -1 value, with equal probability. The +/-1 values correspond to a single direction of magnetic dipole moment in a rectangular lattice of ferromagnetic atoms, or in the case of individual electrons, spin. White squares represent +1 Black squares represent -1 10 x 10 grid 100 x 100 grid Original Metropolis algorithm 1. -

3 Quantum Magnetism 1 3.5 1D & 2D Heisenberg Magnets...33
Contents 3 Quantum Magnetism 1 3.1 Introduction ........................... 1 3.1.1 Atomic magnetic Hamiltonian .......... 1 3.1.2 Curie Law-free spins .................. 3 3.1.3 Magnetic interactions ................. 6 3.2 Ising model ............................ 11 3.2.1 Phase transition/critical point .......... 12 3.2.2 1D solution by transfer matrix ......... 15 3.2.3 Ferromagnetic domains ................ 15 3.3 Ferromagnetic magnons ............... 15 3.3.1 Holstein-Primakoff transformation ...... 15 3.3.2 Linear spin wave theory .............. 18 3.3.3 Dynamical Susceptibility .............. 20 3.4 Quantum antiferromagnet ............. 24 3.4.1 Antiferromagnetic magnons ............ 25 3.4.2 Quantum fluctuations in the ground state 28 3.4.3 Nonlinear spin wave theory ............ 33 3.4.4 Frustrated models .................... 33 3.5 1D & 2D Heisenberg magnets ......... 33 3.5.1 Mermin-Wagner theorem .............. 33 3.5.2 1D: Bethe solution .................... 33 3.5.3 2D: Brief summary ................... 33 3.6 Itinerant magnetism ................... 33 3.7 Stoner model for magnetism in metals ...... 33 3.7.1 Moment formation in itinerant systems . 38 3.7.2 RKKY Interaction .................... 41 3.7.3 Kondo model ......................... 41 0 Reading: 1. Chs. 31-33, Ashcroft & Mermin 2. Ch. 4, Kittel 3. For a more detailed discussion of the topic, see e.g. D. Mattis, Theory of Magnetism I & II, Springer 1981 3 Quantum Magnetism The main purpose of this section is to introduce you to ordered magnetic states in solids and their “spin wave-like” elementary excitations. Magnetism is an enormous field, and reviewing it entirely is beyond the scope of this course. 3.1 Introduction 3.1.1 Atomic magnetic Hamiltonian The simplest magnetic systems to consider are insulators where electron-electron interactions are weak. -

Phenomena, Models and Understanding the Lenz-Ising Model and Critical Phenomena 1920–1971
Phenomena, Models and Understanding The Lenz-Ising Model and Critical Phenomena 1920–1971 Martin Niss 2005 Preface This dissertation has been prepared as the main component in the fulfilment of the re- quirements for the Ph.D. degree at the Department of Mathematics and Physics (IMFUFA) at the University of Roskilde, Denmark. The work has been carried out in the period from February 2001 to March 2005, interrupted by a leave of absence in the academic year 2002-2003 due to my reception of a scholarship to study mathematics abroad. Professor Jeppe C. Dyre was my supervisor. Acknowledgements I would very much like to thank my supervisor Jeppe. From the very beginning of my dissertation work he had enough confidence in me to allow me to go my own ways. Even though he is a professor of physics proper and not a professional historian of physics, he has been keenly interested in my project throughout its duration and his door has always been open when I needed any sort of help. I would also like to thank Dr. Tinne Hoff Kjeldsen who in her capacity as a historian of mathematics has helped me greatly on numerous scholarly issues. I have also benefited very much from her help and advice on non-scholarly problems which unavoidably appear during a Ph.D. study and need to be tackled. My father Mogens Niss has provided numerous supportive comments on my project on all scales of magnitude. The linguistic appearance of the dissertation has greatly benefited from his detailed comments. Jeppe, Tinne and Mogens have all discussed the project with me during the whole period on numerous occasions, and they have read and commented on a draft of the entire dissertation. -

12.2% 119,000 135M Top 1% 154 4,600
See discussions, stats, and author profiles for this publication at: https://www.researchgate.net/publication/337987394 The Ising Model: Brief Introduction and Its Application Chapter · February 2020 DOI: 10.5772/intechopen.90875 CITATIONS READS 2 2,682 1 author: Satya Pal Singh Madan Mohan Malaviya University of Technology, Gorakhpur (U.P.) India 89 PUBLICATIONS 50 CITATIONS SEE PROFILE Some of the authors of this publication are also working on these related projects: UGC Major Research Project View project All content following this page was uploaded by Satya Pal Singh on 29 February 2020. The user has requested enhancement of the downloaded file. We are IntechOpen, the world’s leading publisher of Open Access books Built by scientists, for scientists 4,600 119,000 135M Open access books available International authors and editors Downloads Our authors are among the 154 TOP 1% 12.2% Countries delivered to most cited scientists Contributors from top 500 universities Selection of our books indexed in the Book Citation Index in Web of Science™ Core Collection (BKCI) Interested in publishing with us? Contact [email protected] Numbers displayed above are based on latest data collected. For more information visit www.intechopen.com Chapter The Ising Model: Brief Introduction and Its Application Satya Pal Singh Abstract Though the idea to use numerical techniques, in order to solve complex three-dimensional problems, has become quite old, computational techniques have gained immense importance in past few decades because of the advent of new generation fast and efficient computers and development of algorithms as parallel computing. Many mathematical problems have no exact solutions. -

Ising Model – Phase Transition
MATH 505 Project: Ising model – Phase transition Xin-ZengWu DiLi ZhengDai 1 Introduction Ising model is a mathematical model of ferromagnetism in statistical mechanics, which was invented by Wilhelm Lenz (1920). Wilhelm Lenz gave the model as a problem to his student Ernst Ising. Ising solved this problem in one-dimension in his PHD thesis (1924)[1], which worked on linear chains of coupled magnetic moments. Rudolf Peierls named this model by Ising model in his 1936 publication “On Ising’s model of ferromagnetism”. However, this model was ignored by most scientists for many years and even Ising himself gave up due to the difficulty of solving two-dimensional Ising model. Almost twenty years later, Lars Onsager, winner of the 1968 Nobel Prize in Chemistry, solved two dimensional Ising model in 1944 and exhibited phase transition. And then Ising model enjoyed increased popularity and took its place as the preferred basic theory of all cooperative phenomena. In that time, Ising model is the only one which o↵ers much hope of an accurate study of mechanism. More and more people involved in solving high dimensional Ising model. They modeled phase transition in higher dimensions. Figure 1: Left: Ernst Ising, Right:Lars Onsager The Ising model is concerned with the physical phase transitions. When a small change in a parameter such as temperature or pressure causes a large-scale, qualitative change in the state of a system, it is called phase transitions, which are common in physics and familiar in everyday life. For example, whenever the temperature drops below 0C or it is above 100C, we will see phase transitions of water. -

The Ising Model: Phase Transition in a Square Lattice
THE ISING MODEL: PHASE TRANSITION IN A SQUARE LATTICE ALEXANDRE R. PUTTICK Abstract. The aim of this paper is to give a mathematical treatment of the Ising model, named after its orginal contributor Ernst Ising (1925). The paper will present a brief history concerning the early formulation and applications of the model as well as several of its basic qualities and the relevant equations. We proceed to prove the existence of a critical temperature in two dimensions that follows from the application of the model onto the square lattice. We then move on to a discussion of further breakthroughs concerning the model, providing the mathematical argument that leads to the calculation of the value of the critical temperature as well as a further discussion on the Ising model's continuing significance in an array of scientific fields. Contents 1. Formulation and Brief History 1 2. Characteristics of the Ising Model 3 3. The Existence of a Critical Temperature on the Two-Dimensional Lattice 5 4. The Onsager Transfer Matrix Solution of the Two-dimensional Model 8 5. Concluding Remarks 10 Acknowledgments 10 References 10 1. Formulation and Brief History In 1925 German physicist Ernst Ising formulated what is now called the Ising model as his doctoral thesis under the guidance of Lenz. His orginal aim was to provide a mathematical model for empirically observed qualities of ferromagnetism. Ising initally formulated the model on the points (1,2,...,n) arranged along the Z-line as shown: At each site there is a dipole or spin with two possible orientations, \up" or \down." Definition 1.1. -
Computational Physics Shuai Dong
Computational physiCs Shuai Dong Dice 骰子 Monte Carlo simulations • Sampling and integration • Darts method to calculate p • Random-number generators • The Metropolis algorithm • Ising model What is Monte Carlo? Monte-Carlo, Monaco Monte Carlo Casino Monte Carlo method: computational statistics Birthday: World War II, 1940s Father: S. Ulam Birth Place: neutron reaction in atom bomb, Manhattan Project Von Neumann Stanislaw Ulam (1903-1957) (1909-1984) Principle Physical Problems Simulated by Random Processes Why is it called Monte Carlo? Numerical solutions Sampling and integration If we want to find the numerical value of the integral Divide the region [0, 1] evenly into M slices with x0 = 0 and xM = 1, and then the integral can be approximated as which is equivalent to sampling from a set of points x1, x2, . , xM in the region[0, 1] with an equal weight, in this case, 1, at each point. We can also select xn with n = 1,2,... , M from a uniform random number generator in the region [0,1] to a ccomplish the same goal. If M is very large, we would expect xn to be a set of numbers uniformly distributed in the region [0, 1] with fluctuations proportional to 1/sqrt(M). Then the integral can be approximated by the average where xn is a set of M points generated from a uniform random number generator in the region [0,1]. Example • In order to demonstrate the algorithm clearly, let us take a very simple integrand f (x) = x2 from 0 to 1. • The exact result of the integral is 1/3. -

The Fate of Ernst Ising and the Fate of His Model
The Fate of Ernst Ising and the Fate of his Model Thomas Ising a, Reinhard Folk b, Ralph Kenna c,a, Bertrand Berche d,a, Yurij Holovatch e,a aL4 Collaboration & Doctoral College for the Statistical Physics of Complex Systems, Leipzig-Lorraine-Lviv-Coventry b Institute for Theoretical Physics, Johannes Kepler University Linz, A-4040, Linz, Austria cApplied Mathematics Research Centre, Coventry University, Coventry, CV1 5FB, United Kingdom dStatistical Physics Group, Laboratoire de Physique et Chimie Th´eoriques, Universit´ede Lorraine, F-54506 Vandœuvre-les-Nancy Cedex, France eInstitute for Condensed Matter Physics, National Acad. Sci. of Ukraine, UA–79011 Lviv, Ukraine June 6, 2017 Abstract On this, the occasion of the 20th anniversary of the “Ising Lec- tures” in Lviv (Ukraine), we give some personal reflections about the famous model that was suggested by Wilhelm Lenz for ferromagnetism in 1920 and solved in one dimension by his PhD student, Ernst Ising, in 1924. That work of Lenz and Ising marked the start of a scientific direction that, over nearly 100 years, delivered extraordinary successes in explaining collective behaviour in a vast variety of systems, both within and beyond the natural sciences. The broadness of the appeal of the Ising model is reflected in the variety of talks presented at the Ising lectures (http://www.icmp.lviv.ua/ising/) over the past two arXiv:1706.01764v1 [physics.hist-ph] 6 Jun 2017 decades but requires that we restrict this report to a small selection of topics. The paper starts with some personal memoirs of Thomas Ising (Ernst’s son). We then discuss the history of the model, exact solutions, experimental realisations, and its extension to other fields. -

The Ising Model in One and Two Dimensions
Seminar on Statistical Physics at the University of Heidelberg The Ising Model in One and Two Dimensions Johannes Obermeyer Summary of talk from 22 may 2020 Lecturer: Prof. Dr. G. Wolschin Abstract The Ising model is a theoretical model in statistical physics to describe ferromagnetism. It simplifies the complex properties of solids by assuming only nearest neighbor interaction between lattice sites and allowing only two opposite pointing orientations of each lattice site’s magnetic moment. It is analytically exactly solvable in one and two dimensions by means of different mathematical approaches. The Ising model shows the expected phase transition for a ferromagnet only in two and higher dimensions. 29 may 2020 Contents 1 Basic idea and motivation1 2 History of the Ising model2 3 Ising model3 3.1 One-dimensional Ising model........................4 3.1.1 Ernst Ising’s origianl solution......................4 3.1.2 Transfer matrix formalism.......................6 3.2 Two-dimensional Ising model........................8 3.2.1 Transfer matrix formalism.......................8 3.2.2 L. Onsager’s exact solution....................... 10 4 Numerical simulations of the Ising model 12 4.1 The Metropolis algorithm.......................... 12 5 Summary and Outlook 15 Bibliography 16 i 1. Basic idea and motivation The Ising model is a theoretical model in statistical physics that was developed to describe ferromagnetism. The ferromagnet in one or two dimensions can be modeled as a linear chain or rather a rectangular lattice with one molecule or atom at each lattice site i. To each molecule or atom a magnetic moment is assigned that is rep- resented in the model by a discrete variable σi.