Design of Solar Powered Airplanes for Continuous Flight
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Solar Irradiance Changes and the Sunspot Cycle 27
Solar Irradiance Changes and the Sunspot Cycle 27 Irradiance (also called insolation) is a measure of the amount of sunlight power that falls upon one square meter of exposed surface, usually measured at the 'top' of Earth's atmosphere. This energy increases and decreases with the season and with your latitude on Earth, being lower in the winter and higher in the summer, and also lower at the poles and higher at the equator. But the sun's energy output also changes during the sunspot cycle! The figure above shows the solar irradiance and sunspot number since January 1979 according to NOAA's National Geophysical Data Center (NGDC). The thin lines indicate the daily irradiance (red) and sunspot number (blue), while the thick lines indicate the running annual average for these two parameters. The total variation in solar irradiance is about 1.3 watts per square meter during one sunspot cycle. This is a small change compared to the 100s of watts we experience during seasonal and latitude differences, but it may have an impact on our climate. The solar irradiance data obtained by the ACRIM satellite, measures the total number of watts of sunlight that strike Earth's upper atmosphere before being absorbed by the atmosphere and ground. Problem 1 - About what is the average value of the solar irradiance between 1978 and 2003? Problem 2 - What appears to be the relationship between sunspot number and solar irradiance? Problem 3 - A homeowner built a solar electricity (photovoltaic) system on his roof in 1985 that produced 3,000 kilowatts-hours of electricity that year. -

Solar Irradiance Measurements Using Smart Devices: a Cost-Effective Technique for Estimation of Solar Irradiance for Sustainable Energy Systems
sustainability Article Solar Irradiance Measurements Using Smart Devices: A Cost-Effective Technique for Estimation of Solar Irradiance for Sustainable Energy Systems Hussein Al-Taani * ID and Sameer Arabasi ID School of Basic Sciences and Humanities, German Jordanian University, P.O. Box 35247, Amman 11180, Jordan; [email protected] * Correspondence: [email protected]; Tel.: +962-64-294-444 Received: 16 January 2018; Accepted: 7 February 2018; Published: 13 February 2018 Abstract: Solar irradiance measurement is a key component in estimating solar irradiation, which is necessary and essential to design sustainable energy systems such as photovoltaic (PV) systems. The measurement is typically done with sophisticated devices designed for this purpose. In this paper we propose a smartphone-aided setup to estimate the solar irradiance in a certain location. The setup is accessible, easy to use and cost-effective. The method we propose does not have the accuracy of an irradiance meter of high precision but has the advantage of being readily accessible on any smartphone. It could serve as a quick tool to estimate irradiance measurements in the preliminary stages of PV systems design. Furthermore, it could act as a cost-effective educational tool in sustainable energy courses where understanding solar radiation variations is an important aspect. Keywords: smartphone; solar irradiance; smart devices; photovoltaic; solar irradiation 1. Introduction Solar irradiation is the total amount of solar energy falling on a surface and it can be related to the solar irradiance by considering the area under solar irradiance versus time curve [1]. Measurements or estimation of the solar irradiation (solar energy in W·h/m2), in a specific location, is key to study the optimal design and to predict the performance and efficiency of photovoltaic (PV) systems; the measurements can be done based on the solar irradiance (solar power in W/m2) in that location [2–4]. -
Solar Radiation Modeling and Measurements for Renewable Energy Applications: Data and Model Quality
March 2003 • NREL/CP-560-33620 Solar Radiation Modeling and Measurements for Renewable Energy Applications: Data and Model Quality Preprint D.R. Myers To be presented at the International Expert Conference on Mathematical Modeling of Solar Radiation and Daylight—Challenges for the 21st Century Edinburgh, Scotland September 15–16, 2003 National Renewable Energy Laboratory 1617 Cole Boulevard Golden, Colorado 80401-3393 NREL is a U.S. Department of Energy Laboratory Operated by Midwest Research Institute • Battelle • Bechtel Contract No. DE-AC36-99-GO10337 NOTICE The submitted manuscript has been offered by an employee of the Midwest Research Institute (MRI), a contractor of the US Government under Contract No. DE-AC36-99GO10337. Accordingly, the US Government and MRI retain a nonexclusive royalty-free license to publish or reproduce the published form of this contribution, or allow others to do so, for US Government purposes. This report was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not necessarily constitute or imply its endorsement, recommendation, or favoring by the United States government or any agency thereof. The views and opinions of authors expressed herein do not necessarily state or reflect those of the United States government or any agency thereof. -

Development of Design Methodology for a Small Solar-Powered Unmanned Aerial Vehicle
Hindawi International Journal of Aerospace Engineering Volume 2018, Article ID 2820717, 10 pages https://doi.org/10.1155/2018/2820717 Research Article Development of Design Methodology for a Small Solar-Powered Unmanned Aerial Vehicle 1 2 Parvathy Rajendran and Howard Smith 1School of Aerospace Engineering, Universiti Sains Malaysia, Penang, Malaysia 2Aircraft Design Group, School of Aerospace, Transport and Manufacture Engineering, Cranfield University, Cranfield, UK Correspondence should be addressed to Parvathy Rajendran; [email protected] Received 7 August 2017; Revised 4 January 2018; Accepted 14 January 2018; Published 27 March 2018 Academic Editor: Mauro Pontani Copyright © 2018 Parvathy Rajendran and Howard Smith. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited. Existing mathematical design models for small solar-powered electric unmanned aerial vehicles (UAVs) only focus on mass, performance, and aerodynamic analyses. Presently, UAV designs have low endurance. The current study aims to improve the shortcomings of existing UAV design models. Three new design aspects (i.e., electric propulsion, sensitivity, and trend analysis), three improved design properties (i.e., mass, aerodynamics, and mission profile), and a design feature (i.e., solar irradiance) are incorporated to enhance the existing small solar UAV design model. A design validation experiment established that the use of the proposed mathematical design model may at least improve power consumption-to-take-off mass ratio by 25% than that of previously designed UAVs. UAVs powered by solar (solar and battery) and nonsolar (battery-only) energy were also compared, showing that nonsolar UAVs can generally carry more payloads at a particular time and place than solar UAVs with sufficient endurance requirement. -
Optical Modeling and Characterization of Radiative Cooling for Solar Energy
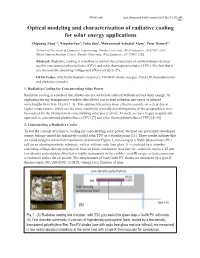
57K%SGI /LJKW(QHUJ\DQGWKH(QYLURQPHQW (3962/$5 66/ 2SWLFDOPRGHOLQJDQGFKDUDFWHUL]DWLRQRIUDGLDWLYHFRROLQJ IRUVRODUHQHUJ\DSSOLFDWLRQV =KLJXDQJ=KRX;LQJVKX6XQ<XER6XQ0XKDPPDG$VKUDIXO$ODP3HWHU%HUPHO 6FKRRORI(OHFWULFDO &RPSXWHU(QJLQHHULQJ3XUGXH8QLYHUVLW\:HVW/DID\HWWH,186$ %LUFN1DQRWHFKQRORJ\&HQWHU3XUGXH8QLYHUVLW\:HVW/DID\HWWH,186$ $EVWUDFW5DGLDWLYHFRROLQJLVDPHWKRGWRFRQWUROWKHWHPSHUDWXUHRIVHPLFRQGXFWRUGHYLFHV XVHGLQFRQFHQWUDWHGSKRWRYROWDLFV &39 DQGVRODUWKHUPRSKRWRYROWDLFV 739 :HILQGWKDWLW FDQLQFUHDVHWKHRSHUDWLQJYROWDJHDQGHIILFLHQF\XSWR 2&,6&RGHV 5DGLDWLYHWUDQVIHU 6RODUHQHUJ\ 1DQRSKRWRQLFV DQGSKRWRQLFFU\VWDOV 5DGLDWLYH&RROLQJIRU&RQFHQWUDWLQJ6RODU3RZHU 5DGLDWLYHFRROLQJLVDPHWKRGWKDWDOORZVRQHWRFRROEHORZDPELHQWZLWKRXWDQ\QHWLQSXWHQHUJ\E\ H[SORLWLQJWKHVN\WUDQVSDUHQF\ZLQGRZWKLVDOORZVRQHWRVHQGUDGLDWLRQLQWRVSDFHDWLQIUDUHG ZDYHOHQJWKVIURPWRPP>±@7KLVDSSURDFKEHFRPHVPRVWHIIHFWLYHRXWVLGHRQDFOHDUGD\DW KLJKHUWHPSHUDWXUHVZKLFKDUHWKHVDPHFRQGLWLRQVW\SLFDOO\GHVFULELQJPDQ\RIWKHJHRJUDSKLFDOVLWHV EHVWVXLWHGIRUWKHSURGXFWLRQRIFRQFHQWUDWLQJVRODUSRZHU>±@$VVXFKZHKDYHEHJXQWRDSSO\WKLV DSSURDFKWRFRQFHQWUDWHGSKRWRYROWDLFV &39 >@DQGVRODUWKHUPRSKRWRYROWDLFV 739 >±@ &RQVWUXFWLQJD5DGLDWLYH&RROHU 7RWHVWWKHFRQFHSWRIUDGLDWLYHFRROLQJIRUFRQFHQWUDWLQJVRODUSRZHUZHXVHGRXUSUHYLRXVO\GHYHORSHG HQHUJ\EDODQFHPRGHOIRUUDGLDWLYHO\FRROHGVRODU739DVDVWDUWLQJSRLQW>@7KHVHUHVXOWVLQGLFDWHWKDW ZHFRXOGGHVLJQDFRQWUROOHGH[SHULPHQWGHSLFWHGLQ)LJXUHFRQVLVWLQJRID*D6ESKRWRYROWDLF 39 FHOORQDQDOXPLQXPQLWULGHVXEVWUDWHZLWKRUZLWKRXWVRGDOLPHJODVV,WLVHQFORVHGE\DFKDPEHU FRQVLVWLQJRIKLJKGHQVLW\SRO\VW\UHQHIRDPWREORFNFRQGXFWLRQKHDWWUDQVIHUVHDOHGRQWRSE\DͳͷɊ -
Basic of Solar PV 3 A
Rooftop Solar PV System Designers and Installers Training Curriculum APEC Secretariat March 2015 BASIC SOLAR PV SYSTEM Phptp by marufish (flickr free use) TYPES Training of PV Designer and Installer Phptp by kyknoord (flickr free use) Phptp by thomas kohler (flickr free use) Contents A. Types of solar energy B. Basic terminology C. Types of solar PV systems D. Energy generation and storage Basic of Solar PV 3 A. Types of solar energy These are all “solar panels”: Solar thermal Solar Solar thermo-electric PV Basic of Solar PV 4 A. Types of solar energy There are two common types of solar energy systems: . Thermal systems . Photovoltaic systems (PV) Thermal systems heat water for domestic heating and recreational use (i.e. hot water, pool heating, radiant heating and air collectors). The use of thermal solar systems to produce steam for electricity is also increasing (Thermoelectric plants). Examples: Solar Thermal Electric Plants Pre-heating of feed water before turned into steam Photovoltaic (PV) systems convert sun’s rays into electricity Some PV systems have batteries to store electricity Other systems feed unused electric back into the grid Basic of Solar PV 5 A. Types of solar energy Thermal system application Basic of Solar PV 6 A. Types of solar energy Thermoelectric Basic of Solar PV 7 A. Types of solar energy Photovoltaic Photovoltaic systems primary components: . Modules . Inverters Basic of Solar PV 8 B. Basic terminology . Solar irradiance is the intensity of solar power, usually expressed in Watts per square meter [W/m2] . PV modules output is rated based on Peak Sun Hours (equivalent to 1000 W/m2). -
FUN with the SUN TEACHER’S ACTIVITY GUIDE for ELEMENTARY GRADES K-2
FUN WITH THE SUN TEACHER’S ACTIVITY GUIDE for ELEMENTARY GRADES K-2 National Renewable Energy Laboratory Education Programs 1617 Cole Blvd. Golden, Colorado 80401 Tel: (303) 275-3044 Home page: http://www.nrel.gov Fun with the Sun -K-2- page 2 ACKNOWLEDGMENTS The Education Program Office at NREL would like to thank the following individuals for their commitment and hard work in the testing and revising of this activity kit. The expertise of these educators was invaluable in producing a final product that attempts to be "user friendly " Their open-mindedness and willingness to try all the activities with their students generated productive feedback that will, we hope, continue as more teachers use these materials. Susan Fields, First Grade Teacher, Little Elementary, Jeffco School District Sue Ginsberg, First Grade Teacher, Van Arsdale Elementary, Jeffco School District Carol Prekker, Second Grade Teacher, Little Elementary, Jeffco School District Fran Tarchalski, Second Grade Teacher, Eiber Elementary, Jeffco School District A special thank you also is extended to Professor James Schreck, Department of Chemistry and Biochemistry at the University of Northern Colorado for his assistance in the development of these kits. It is the goal of the Education Programs Office to make these kits accessible, easy to use, and fun. We want your students to gain, not only an understanding of renewable and nonrenewable energy resources, but a greater confidence in investigating, questioning, and experimenting with scientific ideas. Your feedback on the evaluation form found at the end of this packet is very important for us to continue to build and improve this kit. -

Effect of Temperature and Irradiance on Solar Module Performance
IOSR Journal of Electrical and Electronics Engineering (IOSR-JEEE) e-ISSN: 2278-1676,p-ISSN: 2320-3331, Volume 13, Issue 2 Ver. III (Mar. – Apr. 2018), PP 36-40 www.iosrjournals.org Effect of Temperature and Irradiance on Solar Module Performance Dr.P.Sobha Rani1, Dr.M.S.Giridhar2, Mr.R.Sarveswara Prasad3 1(Department Of Eee, L.B.R.College of Engineering, India) 2(Department Of Eee, L.B.R.College of Engineering, India) 3(Department Of Eie, L.B.R.College of Engineering, India) Corresponding Author: Dr.P.Sobha Rani Abstract : Solar Photovoltaic power generation systems are progressively widespread with the rise in the energy demand, to reduce consumption of fossil fuels and the concern for the environmental pollution around the world. Solar cell performance is determined by its parameters short circuit current (Isc), open circuit voltage (Voc), and fill factor. This paper analyses theoretically the effect of temperature, irradiance on the performance of solar cell and Module. Keywords - Solar PV cell, Irradiance, Temperature, Cell characteristics, Fill factor ----------------------------------------------------------------------------------------------------------------------------- ---------- Date of Submission: 28-03-2018 Date of acceptance: 14-04-2018 ----------------------------------------------------------------------------------------------------------------- ---------------------- I. Introduction Over the past decade utilization of solar energy has grown tremendously due to its advantages. These advantages include easy installing, no noise, maintenance free, inexhaustible and environment friendly. It is interesting to note that the surface of earth receives solar energy which is 6000 times the earth’s energy demand. A solar PV system is powered by many crystalline and thin film PV modules. Individual PV cells are interconnected to form a module [1, 2]. This takes the form of a panel for easy installation. -

Renewable Energy Data, Analysis, and Decisions: a Guide For
Renewable Energy Data, Analysis, and Decisions: A Guide for Practitioners Sadie Cox, Anthony Lopez, Andrea Watson, and Nick Grue National Renewable Energy Laboratory Jennifer E. Leisch United States Agency for International Development NREL is a national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy Operated by the Alliance for Sustainable Energy, LLC This report is available at no cost from the National Renewable Energy Laboratory (NREL) at www.nrel.gov/publications. Technical Report NREL/TP-6A20-68913 March 2018 Contract No. DE-AC36-08GO28308 Renewable Energy Data, Analysis, and Decisions: A Guide for Practitioners Sadie Cox, Anthony Lopez, Andrea Watson, and Nick Grue National Renewable Energy Laboratory Jennifer E. Leisch United States Agency for International Development Prepared under Task No. WFED.10355.08.01.11 NREL is a national laboratory of the U.S. Department of Energy Office of Energy Efficiency & Renewable Energy Operated by the Alliance for Sustainable Energy, LLC This report is available at no cost from the National Renewable Energy Laboratory (NREL) at www.nrel.gov/publications. National Renewable Energy Laboratory Technical Report 15013 Denver West Parkway NREL/TP-6A20-68913 Golden, CO 80401 March 2018 303-275-3000 • www.nrel.gov Contract No. DE-AC36-08GO28308 NOTICE This report was prepared as an account of work sponsored by an agency of the United States government. Neither the United States government nor any agency thereof, nor any of their employees, makes any warranty, express or implied, or assumes any legal liability or responsibility for the accuracy, completeness, or usefulness of any information, apparatus, product, or process disclosed, or represents that its use would not infringe privately owned rights. -

Sevscience - Physical Science Summer Series #1
SevScience - Physical Science Summer Series #1 Message from Mr. Severino: CK-12 Welcome to your study of Physical Science! This course serves as a solid foundation for courses in Jeanphysics, Brainard, chemistry, Ph.D. technology, and design-process learning. Through these introductory readings, you will gain insight into some of the careers and fields of human endeavor characterized by the physical sciences. For your summer assignment, please complete the following points: 1) Thoroughly read each chapter. 2) Complete the review questions at the end of each chapter.These review questions are to be completed electronically. To share your answers with me, you may use Google Docs, your Microsoft Office school account, or email. 3) Later this summer, you will receive links for online quizzes related to the readings in this textbook. These quizzes will be compiled as a major test grade. 4) The due date for all summer assignments is Tuesday, September 1, 2020. Say Thanks to the Authors If you have any questionsClick about http://www.ck12.org/saythanks this assignment, please do not hesitate to contact me at [email protected].(No sign in required) I look forward to seeing you in the Fall. Have a safe, enjoyable Summer! Contents www.ck12.org Contents 1 Introduction to Physical Science1 1.1 Nature of Science.......................................... 2 1.2 Scientific Theory .......................................... 6 1.3 Scientific Law............................................ 9 1.4 History of Science.......................................... 11 1.5 Ethics in Science .......................................... 15 1.6 Scope of Physical Science...................................... 18 1.7 Scope of Chemistry......................................... 20 1.8 Scope of Physics........................................... 23 1.9 Physical Science Careers ..................................... -

Outdoor Performance of Organic Photovoltaics: Diurnal Analysis, Dependence on Temperature, Irradiance, and Degradation
Outdoor performance of organic photovoltaics: Diurnal analysis, dependence on temperature, irradiance, and degradation Cite as: J. Renewable Sustainable Energy 7, 013111 (2015); https://doi.org/10.1063/1.4906915 Submitted: 06 October 2014 . Accepted: 17 January 2015 . Published Online: 29 January 2015 N. Bristow, and J. Kettle ARTICLES YOU MAY BE INTERESTED IN Effects of concentrated sunlight on organic photovoltaics Applied Physics Letters 96, 073501 (2010); https://doi.org/10.1063/1.3298742 Temperature dependence for the photovoltaic device parameters of polymer-fullerene solar cells under operating conditions Journal of Applied Physics 90, 5343 (2001); https://doi.org/10.1063/1.1412270 Two-layer organic photovoltaic cell Applied Physics Letters 48, 183 (1986); https://doi.org/10.1063/1.96937 J. Renewable Sustainable Energy 7, 013111 (2015); https://doi.org/10.1063/1.4906915 7, 013111 © 2015 AIP Publishing LLC. JOURNAL OF RENEWABLE AND SUSTAINABLE ENERGY 7, 013111 (2015) Outdoor performance of organic photovoltaics: Diurnal analysis, dependence on temperature, irradiance, and degradation N. Bristow and J. Kettlea) School of Electronic Engineering, Bangor University, Dean St., Bangor, Gwynedd, Wales, United Kingdom (Received 6 October 2014; accepted 17 January 2015; published online 29 January 2015) The outdoor dependence of temperature and diurnal irradiance on inverted organic photovoltaic (OPV) module performance has been analysed and benchmarked against monocrystalline-silicon (c-Si) photovoltaic technology. This is first such report and it is observed that OPVs exhibit poorer performance under low light conditions, such as overcast days, as a result of inflexion behaviour in the current- voltage curves, which limits the open-circuit voltage (VOC) and fill factor. -

Solar Thermophotovoltaics: Reshaping the Solar Spectrum
Nanophotonics 2016; aop Review Article Open Access Zhiguang Zhou*, Enas Sakr, Yubo Sun, and Peter Bermel Solar thermophotovoltaics: reshaping the solar spectrum DOI: 10.1515/nanoph-2016-0011 quently converted into electron-hole pairs via a low-band Received September 10, 2015; accepted December 15, 2015 gap photovoltaic (PV) medium; these electron-hole pairs Abstract: Recently, there has been increasing interest in are then conducted to the leads to produce a current [1– utilizing solar thermophotovoltaics (STPV) to convert sun- 4]. Originally proposed by Richard Swanson to incorporate light into electricity, given their potential to exceed the a blackbody emitter with a silicon PV diode [5], the basic Shockley–Queisser limit. Encouragingly, there have also system operation is shown in Figure 1. However, there is been several recent demonstrations of improved system- potential for substantial loss at each step of the process, level efficiency as high as 6.2%. In this work, we review particularly in the conversion of heat to electricity. This is because according to Wien’s law, blackbody emission prior work in the field, with particular emphasis on the µm·K role of several key principles in their experimental oper- peaks at wavelengths of 3000 T , for example, at 3 µm ation, performance, and reliability. In particular, for the at 1000 K. Matched against a PV diode with a band edge λ problem of designing selective solar absorbers, we con- wavelength g < 2 µm, the majority of thermal photons sider the trade-off between solar absorption and thermal have too little energy to be harvested, and thus act like par- losses, particularly radiative and convective mechanisms.