Educational Robot for Principles of Electrical Engineering
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Investigation of Dispersion in Uence on the Chirp Microwave Generation Using Microwave Photonic Link Without Optical Lter
Scientia Iranica D (2018) 25(6), 3584{3590 Sharif University of Technology Scientia Iranica Transactions D: Computer Science & Engineering and Electrical Engineering http://scientiairanica.sharif.edu Investigation of dispersion in uence on the chirp microwave generation using microwave photonic link without optical lter M. Singha; and S. Kumar Raghuwanshib a. Department of Electronics & Communication Engineering, Photonic Research Laboratory (PRL), Indian Institute of Technology, Roorkee 247667, Uttarakhand, India. b. Department of Electronics Engineering, Indian Institute of Technology (Indian School of Mines), Dhanbad 826004, Jharkhand, India. Received 16 February 2016; received in revised form 1 October 2016; accepted 17 December 2016 KEYWORDS Abstract. In this work, we investigate the in uence of the second-order (2OD) and third-order (3OD) dispersion terms on chirp signal generation and transmission through RF photonics; RF photonic link without any optical lter. Dispersion equations are formalised using Triple Parallel- Taylor series and Bessel function to study the link performance. Our result (eye diagrams) Intensity Modulators shows that 2OD+3OD has a signi cant impact on chirp mm-wave propagation through (TP-IM); bres of di erent lengths. In this paper, chirp mm signal is controlled at photo detector by Fibre dispersion; individual phase term of external modulators. Moreover, we experimentally demonstrate RoF; that the chirp rate can be signi cantly controlled by properly choosing the type of bre in Optical sideband the experiments. We discuss the RF photonic link performance in terms of optical sideband suppression ratio suppression ratio (OPSSR), Radio Frequency Spurious Suppression Ratio (RFSSR), and (OPSSR); Bit Error Rate (BER). Theoretical results are veri ed using MATLAB Software. -

Beng Electronic Engineering (12130008)
University of Pretoria Yearbook 2017 BEng Electronic Engineering (12130008) Duration of study 4 years Total credits 568 Programme information All fields of study of the BEng degree have been accredited by the Engineering Council of South Africa (ECSA), and comply with the academic requirements for registration as a professional engineer. The programmes are designed in accordance with the outcomes-based model as required by the South African Qualifications Authority (SAQA). The learning outcomes and contents of the programmes have been compiled in accordance with the latest accreditation standards (PE-60 and PE-61) of ECSA, which also comply with the SAQA requirements, and which are summarised as follows: Learning outcomes of the BEng degree: A graduate in engineering should be able to apply the following skills on an advanced level: a. Engineering problem solving. b. Application of specialist and fundamental knowledge, with specific reference to mathematics, basic sciences and engineering sciences. c. Engineering design and synthesis. d. Investigation, experimentation and data analysis. e. Engineering methods, skills, tools and information technology. f. Professional and general communication. g. Awareness and knowledge of the impact of engineering activity on society and the physical environment. h. Work in teams and in multidisciplinary environments. i. An awareness and ability for lifelong learning. j. An awareness and knowledge of principles of professional ethics and practice. Learning contents of the BEng programmes: Six essential knowledge areas are included in the syllabi of the programmes. The typical representation of each knowledge area as a percentage of the total contents of an undergraduate programme is given in brackets ( ) in the list below. -

Nanoporous Metal-Organic Framework Cu2(BDC)2(DABCO) As an E Cient Heterogeneous Catalyst for One-Pot Facile Synthesis of 1,2,3-T
Scientia Iranica C (2019) 26(3), 1485{1496 Sharif University of Technology Scientia Iranica Transactions C: Chemistry and Chemical Engineering http://scientiairanica.sharif.edu Nanoporous metal-organic framework Cu2(BDC)2(DABCO) as an ecient heterogeneous catalyst for one-pot facile synthesis of 1,2,3-triazole derivatives in ethanol: Evaluating antimicrobial activity of the novel derivatives H. Tourani, M.R. Naimi-Jamal, L. Panahi, and M.G. Dekamin Research Laboratory of Green Organic Synthesis & Polymers, Department of Chemistry, Iran University of Science and Technology, Tehran, P.O. Box 16846-13114, I.R. Iran. Received 6 April 2018; received in revised form 11 August 2018; accepted 31 December 2018 KEYWORDS Abstract. Solvent-free ball-milling synthesized porous metal-organic framework Cu (BDC) (DABCO) (BDC: benzene-1,4-dicarboxylic acid, DABCO: 1,4-diazabicyclo Triazoles; 2 2 [2.2.2]octane) has been proved to be a practical catalyst for facile and convenient synthesis Heterogeneous of 1,2,3-triazole derivatives via multicomponent reaction of terminal alkynes, benzyl or alkyl catalysis; halides, and sodium azide in ethanol. Avoidance of usage and handling of hazardous organic Cu-MOF; azides, using ethanol as an easily available solvent, and simple preparation and recycling Click chemistry; of the catalyst make this procedure a truly scale-up-able one. The high loading of copper Antimicrobial. ions in the catalyst leads to ecient catalytic activity and hence, its low-weight usage in reaction. The catalyst was recycled and reused several times without signi cant loss of its activity. Furthermore, novel derivatives were examined to investigate their potential antimicrobial activity via microdilution method. -

Tb/S All-Optical Nonlinear Switching Using SOA Based Mach-Zehnder Interferometer
Scientia Iranica D (2014) 21(3), 843{852 Sharif University of Technology Scientia Iranica Transactions D: Computer Science & Engineering and Electrical Engineering www.scientiairanica.com Tb/s all-optical nonlinear switching using SOA based Mach-Zehnder interferometer Y. Khorramia;, V. Ahmadia and M. Razaghib a. Department of Electrical and Computer Engineering, Tarbiat Modares University, Tehran, P.O. Box 14115-143, Iran. b. Department of Electrical and Computer Engineering, University of Kurdistan, Sanandaj, P.O. Box 416, Iran. Received 23 June 2012; received in revised form 29 October 2012; accepted 6 May 2013 KEYWORDS Abstract. A new method for increasing the speed of all-optical Mach-Zehnder Interfero- metric (MZI) switching with a bulk Semiconductor Optical Ampli er (SOA), using chirped Ultrafast nonlinear control signals, is suggested and theoretically analyzed. For 125fs input and chirped control optics; pulses, we show acceleration of the gain recovery process using the cross phase modulation All-optical devices; (XPM) e ect. Our method depicts that Tb/s switching speeds, using bulk SOA-MZI with a Switching; proper Q-factor, is feasible. For the rst time, we reach operation capability at 2Tb/s with Chirping; a Q-factor of more than 10. The new scheme also improves the extinction and amplitude Mach-Zehnder ratio of the output power, as well as increasing the contrast ratio of the switched signal. interferometer; We use a nite di erence beam propagation method for MZI analysis, taking into account Semiconductor optical all nonlinear e ects of SOA, such as Group Velocity Dispersion (GVD), Kerr e ect, Two ampli ers. Photon Absorption (TPA), Carrier Heating (CH) and Spectral Hole Burning (SHB). -
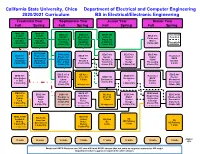
Electrical/Electronic Engineering Curriculum
California State University, Chico Department of Electrical and Computer Engineering 2020/2021 Curriculum BS in Electrical/Electronic Engineering Freshman Year Sophomore Year Junior Year Senior Year Fall Spring Fall Spring Fall Spring Fall Spring Math 120 Math 121 Math 220 Math 260 MATH 350 Concurrent Analytic Analytic EECE 375 Analytic Elementary Intro to Permitted Geometry & Geometry & Fields and Geometry & Differential Probability Calculus Calculus Waves Calculus Equations & Statistics 4 Units (FS) 4 Units (FS) 3 Units (SP) Prerequisite 4 Units (FS) 4 Units (FS) 3 Units (FS) C- or higher req’d C- or higher req’d PHYS 204A PHYS 204B EECE 365 EECE 482 EECE 465 Chem 111 Physics for EECE 311 Restricted Physics for Signals, Control Digital General Engineering Linear EECE Engineering Systems, & System Signal Chemistry Mechanics Circuits II Elective Elec. & Mag. Transforms Design Processing 4 Units (FS) 4 Units (FS) 4 Units (FS) 4 Units 4 Units (FS) 4 Units (FS) 4 Units (FA) 4 Units (FA) C- or higher req’d EECE 211 & GE Area EECE 481 EECE 101 EECE 316 Restricted EECE 211L C1 or C2 EECE 315 Electro- Introduction Electronics EECE Linear 3 Units Electronics I Mechanical to ECE II Elective Circuits I 4 Units (FS) Conversion 3 Units (FA) 4 Units (SP) 4 Units 4 Units (FS) WI Suggested 4 Units (SP) CMST 131 EECE 237 EECE 490A EECE 144 CSCI 111 GE Area EECE 344 EECE 490B Speech Embedded Engineering Digital Program. & D1 or D2 Digital Engineering Comm. System Profession Logic Algorithms I 3 Units System Economics/ Fund. Devel. & Design Fund. 4 Units (FS) Design Implement. -
Is EE Right for You?
Erik Jonsson School of Engggineering and The Un ivers ity o f Texas a t Da llas Computer Science Is EE Right for You? • “Toto, I have a feeling we’re not in Kansas anymore.” • Now that you are here, diii?id you make the right choice? • Electrical engineering is a challenging and satisfying profession. That does not mean it is easy. In fact, with the possible exceptions of medicine or law, it is the MOST difficult. • There are some things you need to consider if you really, really want to be an engineer. • We will consider a few today. EE 1202 Lecture #1 – Why Electrical Engineering? 1 © N. B. Dodge 01/12 Erik Jonsson School of Engggineering and The Un ivers ity o f Texas a t Da llas Computer Science Is EE Right for You (2)? • Why did you decide to be an electrical engineer? – Parents will pay for engineering education (it’s what they want). – You like math and science. – A relative is an engineer and you like him/her. – You want to challenge yourself, and engineering seems challenging. – You think you are creative and love technology. – You want to make a difference in society . EE 1202 Lecture #1 – Why Electrical Engineering? 2 © N. B. Dodge 01/12 Erik Jonsson School of Engggineering and The Un ivers ity o f Texas a t Da llas Computer Science The High School “Science Student” Problem • In high school, you were FAR above the average. – And you probably didn’t study too hard, right? • You liked science and math, and they weren’t terribly hard. -

Electrical Engineering Technology
Electrical Engineering Technology Electrical Engineering Program Accreditation The Electrical Engineering Technology program at Central Piedmont is accredited by the Engineering Technology Accreditation Commission Technology (TAC) of the Accreditation Board of Engineering and Technology (ABET). The Associate in Applied Science degree in Electrical Engineering How to Apply: Technology has been specifically designed to prepare individuals to Complete a Central Piedmont admissions application through Get become advanced technicians in the workforce. Started on the Central Piedmont website. Electrical Engineering Technicians (Associates degree holders) typically build, install, test, troubleshoot, repair, and modify developmental and Contact Information production electronic components, equipment, and systems such as For questions about the program or for assistance as a student in the industrial/computer controls, manufacturing systems, instrumentation program, contact faculty advising. The Electrical Engineering Technology systems, communication systems, and power electronic systems. program is in the Engineering Technology Division. For additional information, visit the Electrical Engineering Technology website or call the A broad-based core of courses ensures that students develop the skills Program Chair at 704.330.6773. necessary to perform entry-level tasks. Emphasis is placed on developing the ability to think critically, analyze, and troubleshoot electronic systems. General Education Requirements Beginning with electrical fundamentals, course work progressively ENG 111 Writing and Inquiry 3.0 introduces electronics, 2D Computer Aided Design (CAD), circuit Select one of the following: 3.0 simulation, solid-state fundamentals, digital concepts, instrumentation, C++ programming, microprocessors, programmable Logic Controllers ENG 112 Writing and Research in the Disciplines (PLCs). Other course work includes the study of various fields associated ENG 113 Literature-Based Research with the electrical/electronic industry. -

Multidisciplinary Design Project Engineering Dictionary Version 0.0.2
Multidisciplinary Design Project Engineering Dictionary Version 0.0.2 February 15, 2006 . DRAFT Cambridge-MIT Institute Multidisciplinary Design Project This Dictionary/Glossary of Engineering terms has been compiled to compliment the work developed as part of the Multi-disciplinary Design Project (MDP), which is a programme to develop teaching material and kits to aid the running of mechtronics projects in Universities and Schools. The project is being carried out with support from the Cambridge-MIT Institute undergraduate teaching programe. For more information about the project please visit the MDP website at http://www-mdp.eng.cam.ac.uk or contact Dr. Peter Long Prof. Alex Slocum Cambridge University Engineering Department Massachusetts Institute of Technology Trumpington Street, 77 Massachusetts Ave. Cambridge. Cambridge MA 02139-4307 CB2 1PZ. USA e-mail: [email protected] e-mail: [email protected] tel: +44 (0) 1223 332779 tel: +1 617 253 0012 For information about the CMI initiative please see Cambridge-MIT Institute website :- http://www.cambridge-mit.org CMI CMI, University of Cambridge Massachusetts Institute of Technology 10 Miller’s Yard, 77 Massachusetts Ave. Mill Lane, Cambridge MA 02139-4307 Cambridge. CB2 1RQ. USA tel: +44 (0) 1223 327207 tel. +1 617 253 7732 fax: +44 (0) 1223 765891 fax. +1 617 258 8539 . DRAFT 2 CMI-MDP Programme 1 Introduction This dictionary/glossary has not been developed as a definative work but as a useful reference book for engi- neering students to search when looking for the meaning of a word/phrase. It has been compiled from a number of existing glossaries together with a number of local additions. -

Robotic and Electronic Engineering Technology Mntc General Education
2020-2021 Technical Requirements .............57 Robotic and Electronic Engineering Technology MnTC General Education ..........15 Associate of Applied Science (AAS) Degree Total Credits ...............................72 Mechatronic Applications: Evaluate and determine that all Program Information • mechatronic equipment is in proper working condition, ensuring The Anoka Technical College Electronic Engineering Technology a safe, reliable manufacturing environment. (EET) program offers a 72-credit Robotic and Electronic Engineering • Safety Compliance: Participate in class in a professional manner, Technology Associate of Applied Science (AAS) degree that prepares by acting in compliance with documented safety procedures and students to work with mechatronics, robotics, automation and controls, appropriate industry standards. computer servicing/networking, and biomedical equipment. Course Prerequisites Students gain a thorough understanding of how computers and machines communicate as well as system level troubleshooting, plus Some courses may require appropriate test score or completion of a solid education in electronic engineering technology fundamentals. basic math, basic English and/or reading courses with a “C” or better. Students will also learn about: Graduation Requirements • Mechatronics All Anoka Technical College students seeking an Associate in Applied • Lasers and Optics Science (AAS), diploma, or certificate must meet the cumulative grade • Robotics point average (GPA) of 2.0 or higher. • Computer Troubleshooting A+ • Networking -

Electrical and Computer Engineering: Past, Present, and Future
Electrical and Computer Engineering: Past, Present, and Future Randy Berry1, chair, Department of Electrical and Computer Engineering The field of electrical and computer engineering (ECE) has had an enormously successful history. This field has pushed the frontiers of fundamental research, led to the emergence of entirely new disciplines, and revolutionized our daily lives. ECE departments2 are found in nearly every engineering school and have historically been one of the larger departments both in terms of faculty and student enrollments. Academically, a strong ECE department is highly correlated with the reputation of an engineering school. Of the top 10 engineering schools in the latest US News and World Report rankings of graduate programs, nine have top 10 ranked ECE programs. Nevertheless, ECE is a field that finds itself facing challenges. In this paper, we will look to the field’s past issues and note how the field repeatedly reinvented itself to push to new heights. Finally, we argue that the time is ripe for another reinvention and show how aspects of such a reinvention are already emerging. Areas such as machine learning and data science, the Internet of things, and quantum information systems provide promising directions for ECE — and embracing them provides a path to a bright future. The Present Situation In many ways, ECE is a victim of its own successes. Advances such as computer-aided design tools reduce the number of designers needed. The increased integration reflected in Moore’s law means that more functionality can be integrated into a single integrated circuit (IC), replacing the need for engineering to integrate multiple components in custom designs. -

An E Ective Approach to Structural Damage Localization in Exural Members Based on Generalized S-Transform
Scientia Iranica A (2019) 26(6), 3125{3139 Sharif University of Technology Scientia Iranica Transactions A: Civil Engineering http://scientiairanica.sharif.edu An e ective approach to structural damage localization in exural members based on generalized S-transform H. Amini Tehrania, A. Bakhshia;, and M. Akhavatb a. Department of Civil Engineering, Sharif University of Technology, Tehran, P.O. Box 11155-9313 Tehran, Iran. b. School of Civil Engineering, Iran University of Science & Technology, Tehran, Iran. Received 7 February 2017; received in revised form 22 October 2017; accepted 23 December 2017 KEYWORDS Abstract. This paper presents a method for structural damage localization based on signal processing using generalized S-transform (S ). The S-transform is a combination Damage localization; GS of the properties of the Short-Time Fourier Transform (STFT) and Wavelet Transform Signal processing; (WT) that has been developed over the last few years in an attempt to overcome inherent Generalized limitations of the wavelet and short-time Fourier transform in time-frequency representation S-transform; of non-stationary signals. The generalized type of this transform is the S -transform Time-frequency GS that is characterized by an adjustable Gaussian window width in the time-frequency representation; representation of signals. In this research, the S -transform was employed due to its Non-stationary GS favorable performance in the detection of the structural damages. The performance of signals. the proposed method was veri ed by means of three numerical examples and, also, the experimental data obtained from the vibration test of 8-DOFs mass-sti ness system. By means of a comparison between damage location obtained by the proposed method and the simulation model, it was concluded that the method was sensitive to the damage existence and clearly demonstrated the damage location. -

A New Algorithm for the Computation of the Decimals of the Inverse
Scientia Iranica D (2017) 24(3), 1363{1372 Sharif University of Technology Scientia Iranica Transactions D: Computer Science & Engineering and Electrical Engineering www.scientiairanica.com A new algorithm for the computation of the decimals of the inverse P. Sahaa; and D. Kumarb a. Department of Electronics and Communication Engineering, National Institute of Technology Meghalaya, Meghalaya-793003, Shillong, India. b. Department of Computer Science and Engineering, National Institute of Technology Meghalaya, Meghalaya-793003; Shillong, INDIA. Received 3 November 2014; received in revised form 4 December 2015; accepted 27 February 2016 KEYWORDS Abstract. Ancient mathematical formulae can be directly applied to the optimization of the algebraic computation. A new algorithm used to compute decimals of the inverse based Algorithm; on such ancient mathematics is reported in this paper. Sahayaks (auxiliary fraction) sutra Arithmetic; has been used for the hardware implementation of the decimals of the inverse. On account Decimal inverse; of the ancient formulae, reciprocal approximation of numbers can generate \on the y" T-Spice; either the rst exact n decimal of inverse, n being either arbitrary large or at least 6 in Propagation delay; almost all cases. The reported algorithm has been implemented, and functionality has been Ancient mathematics. checked in T-Spice. Performance parameters, like propagation delay and dynamic switching power consumptions, are calculated through spice-spectre of 90 nm CMOS technology. The propagation delay of the resulting 4-digit reciprocal approximation algorithm was only 1:8 uS and consumed 24:7 mW power. The implementation methodology o ered substantial reduction of propagation delay and dynamic switching power consumption from its counterpart (NR) based implementation.