Proceedings of Spie
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

The Cubesat Mission to Study Solar Particles (Cusp) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021)
The CubeSat Mission to Study Solar Particles (CuSP) Walt Downing IEEE Life Senior Member Aerospace and Electronic Systems Society President (2020-2021) Acknowledgements – National Aeronautics and Space Administration (NASA) and CuSP Principal Investigator, Dr. Mihir Desai, Southwest Research Institute (SwRI) Feature Articles in SYSTEMS Magazine Three-part special series on Artemis I CubeSats - April 2019 (CuSP, IceCube, ArgoMoon, EQUULEUS/OMOTENASHI, & DSN) ▸ - September 2019 (CisLunar Explorers, OMOTENASHI & Iris Transponder) - March 2020 (BioSentinnel, Near-Earth Asteroid Scout, EQUULEUS, Lunar Flashlight, Lunar Polar Hydrogen Mapper, & Δ-Differential One-Way Range) Available in the AESS Resource Center https://resourcecenter.aess.ieee.org/ ▸Free for AESS members ▸ What are CubeSats? A class of small research spacecraft Built to standard dimensions (Units or “U”) ▸ - 1U = 10 cm x 10 cm x 11 cm (Roughly “cube-shaped”) ▸ - Modular: 1U, 2U, 3U, 6U or 12U in size - Weigh less than 1.33 kg per U NASA's CubeSats are dispensed from a deployer such as a Poly-Picosatellite Orbital Deployer (P-POD) ▸NASA’s CubeSat Launch initiative (CSLI) provides opportunities for small satellite payloads to fly on rockets ▸planned for upcoming launches. These CubeSats are flown as secondary payloads on previously planned missions. https://www.nasa.gov/directorates/heo/home/CubeSats_initiative What is CuSP? NASA Science Mission Directorate sponsored Heliospheric Science Mission selected in June 2015 to be launched on Artemis I. ▸ https://www.nasa.gov/feature/goddard/2016/heliophys ics-cubesat-to-launch-on-nasa-s-sls Support space weather research by determining proton radiation levels during solar energetic particle events and identifying suprathermal properties that could help ▸ predict geomagnetic storms. -

Lunar Flashlight & NEA Scout
National Aeronautics and Space Administration Lunar Flashlight & NEA Scout A NanoSat Architecture for Deep Space Exploration Payam Banazadeh (JPL/Caltech) Andreas Frick (JPL/Caltech) EM-1 Secondary Payload Selection • 19 NASA center-led concepts were evaluated and 3 were down-selected for further refinement by AES toward a Mission Concept Review (MCR) planned for August 2014 • Primary selection criteria: - Relevance to Space Exploration Strategic Knowledge Gaps (SKGs) - Life cycle cost - Synergistic use of previously demonstrated technologies - Optimal use of available civil servant workforce Payload Strategic Knowledge Gaps Mission Concept NASA Centers Addressed BioSentinel Human health/performance in high- Study radiation-induced DNA ARC/JSC radiation space environments damage of live organisms in cis- • Fundamental effects on biological systems lunar space; correlate with of ionizing radiation in space environments measurements on ISS and Earth Lunar Flashlight Lunar resource potential Locate ice deposits in the Moon’s JPL/MSFC/MHS • Quantity and distribution of water and other permanently shadowed craters volatiles in lunar cold traps Near Earth Asteroid (NEA) NEA Characterization Slow flyby/rendezvous and Scout • NEA size, rotation state (rate/pole position) characterize one NEA in a way MSFC/JPL How to work on and interact with NEA that is relevant to human surface exploration • NEA surface mechanical properties 2 EM-1: Near Earth Asteroid (NEA) Scout concept WHY NEA Scout? – Characterize a NEA with an imager to address key Strategic -
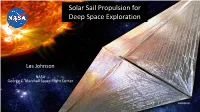
Solar Sail Propulsion for Deep Space Exploration
Solar Sail Propulsion for Deep Space Exploration Les Johnson NASA George C. Marshall Space Flight Center NASA Image We tend to think of space as being big and empty… NASA Image Space Is NOT Empty. We can use the environments of space to our advantage NASA Image Solar Sails Derive Propulsion By Reflecting Photons Solar sails use photon “pressure” or force on thin, lightweight, reflective sheets to produce thrust. 4 NASA Image Real Solar Sails Are Not “Ideal” Billowed Quadrant Diffuse Reflection 4 Thrust Vector Components 4 Solar Sail Trajectory Control Solar Radiation Pressure allows inward or outward Spiral Original orbit Sail Force Force Sail Shrinking orbit Expanding orbit Solar Sails Experience VERY Small Forces NASA Image 8 Solar Sail Missions Flown Image courtesy of Univ. Surrey NASA Image Image courtesy of JAXA Image courtesy of The Planetary Society NanoSail-D (2010) IKAROS (2010) LightSail-1 & 2 CanX-7 (2016) InflateSail (2017) NASA JAXA (2015/2019) Canada EU/Univ. of Surrey The Planetary Society Earth Orbit Interplanetary Earth Orbit Earth Orbit Deployment Only Full Flight Earth Orbit Deployment Only Deployment Only Deployment / Flight 3U CubeSat 315 kg Smallsat 3U CubeSat 3U CubeSat 10 m2 196 m2 3U CubeSat <10 m2 10 m2 32 m2 9 Planned Solar Sail Missions NASA Image NASA Image NASA Image Near Earth Asteroid Scout Advanced Composite Solar Solar Cruiser (2025) NASA (2021) NASA Sail System (TBD) NASA Interplanetary Interplanetary Earth Orbit Full Flight Full Flight Full Flight 100 kg spacecraft 6U CubeSat 12U CubeSat 1653 m2 86 -
Small Spacecraft Programs
Planetary Science Deep Space SmallSat Studies Small Spacecraft Programs Carolyn Mercer Program Officer, PSDS3 Program Executive, SIMPLEx NASA Glenn Research Center Briefing to the Mars Exploration Program Analysis Group (MEPAG) April 4, 2018 Crystal City, VA NOTE ADDED BY JPL WEBMASTER: This content has not been approved or adopted by NASA, JPL, or the California Institute of Technology. This document is being made available for information purposes only, and any views and opinions expressed herein do not necessarily state or reflect those of NASA, JPL, or the 1 California Institute of Technology. SMD CubeSat/SmallSat Approach Planetary Science Deep Space SmallSat Studies National Academies Report (2016) concluded that CubeSats have proven their ability to produce high- value science: • Useful as targeted investigations to augment the capabilities of larger missions • Useful to make highly-specific measurements • Constellations of 10-100 CubeSat/SmallSat spacecraft have the potential to enable transformational science SMD is developing a directorate-wide approach to: • Identify high-priority science objectives in each discipline that can be addressed with CubeSats/SmallSats • Manage program with appropriate cost and risk • Establish a multi-discipline approach and collaboration that helps science teams learn from experiences and grow capability, while avoiding unnecessary duplication • Leverage and partner with a growing commercial sector to collaboratively drive instrument and sensor innovation 2 PLANETARY SCIENCE DEEP SPACE SMALLSAT -

Sistema De Evaluación De Aprendizajes Para Alumnos En Situación De Extraedad
Estrategia Integral para la Mejora del Logro Educativo Alianza por la Calidad de la Educación Sistema de evaluación de aprendizajes para alumnos en situación de extraedad Colección Hacia el Logro Educativo Programa para el Fortalecimiento del Logro Educativo Sistema de evaluación de aprendizajes para alumnos en situación de extraedad Colección Hacia el Logro Educativo Sistema de evaluación de aprendizajes para alumnos en situación de extraedad,es una publicación de la Dirección General de Desarrollo de la Gestión e Innovación Educativa de la Subsecretaría de Educación Básica, realizada a través del Proyecto para Atender a la Población en Situación de Extraedad, por encargo a la Organización de Estados Iberoamericanos para la Educación, la Ciencia y la Cultura (OEI) y con la colaboración del Centro de Estudios Educativos (CEE). Alonso Lujambio Secretario de Educación Pública José Fernando González Sánchez Subsecretario de Educación Básica Coordinación general Alma Rosa Cuervo González Juan Martín Martínez Becerra Cuidado de la edición Director General de Desarrollo de la Gestión Esteban Manteca Aguirre e Innovación Educativa Jorge Humberto Miranda Vázquez Tonatiuh Arroyo Cerezo Ernesto Adolfo Ponce Rodríguez Coordinador General de Innovación Colaboradores de la Ofi cina de la Organización de Estados Iberoamericanos para la Educación, la Ciencia y la Cultura y autores de esta obra Lilia Dalila López Salmorán Coordinadora Nacional para el Fortalecimiento Coordinación del Logro Educativo Carlos Niembro Acosta Colaboradores Teresa Zamudio Gisela Santiago Benítez Maura Pompa Mancilla D.R. © Secretaría de Educación Pública, 2011 Diana Gómez Mayén Argentina 28 Col. Centro Histórico C.P. 06020, México, D.F. ISBN: 978-607-8017-53-9 Diseño y formación Constantine Editores, S. -

Developing Technologies for Biological Experiments in Deep Space
Developing technologies for biological experiments in deep space Sergio R. Santa Maria Elizabeth Hawkins Ada Kanapskyte NASA Ames Research Center [email protected] NASA’s life science programs STS-1 (1981) STS-135 (2011) 1973 – 1974 1981 - 2011 2000 – 2006 – Space Shuttle International Skylab Bio CubeSats Program Space Station Microgravity effects - Nausea / vomit - Disorientation & sleep loss - Body fluid redistribution - Muscle & bone loss - Cardiovascular deconditioning - Increase pathogenicity in microbes Interplanetary space radiation What type of radiation are we going to encounter beyond low Earth orbit (LEO)? Galactic Cosmic Rays (GCRs): - Interplanetary, continuous, modulated by the 11-year solar cycle - High-energy protons and highly charged, energetic heavy particles (Fe-56, C-12) - Not effectively shielded; can break up into lighter, more penetrating pieces Challenges: biology effects poorly understood (but most hazardous) Interplanetary space radiation Solar Particle Events (SPEs) - Interplanetary, sporadic, transient (several min to days) - High proton fluxes (low and medium energy) - Largest doses occur during maximum solar activity Challenges: unpredictable; large doses in a short time Space radiation effects Space radiation is the # 1 risk to astronaut health on extended space exploration missions beyond the Earth’s magnetosphere • Immune system suppression, learning and memory impairment have been observed in animal models exposed to mission-relevant doses (Kennedy et al. 2011; Britten et al. 2012) • Low doses of space radiation are causative of an increased incidence and early appearance of cataracts in astronauts (Cuccinota et al. 2001) • Cardiovascular disease mortality rate among Apollo lunar astronauts is 4-5-fold higher than in non-flight and LEO astronauts (Delp et al. -

Explore Science
SMALL SATELLITE MISSIONS FOR PLANETARY SCIENCE Carolyn R. Mercer, Ph.D. Program Executive, Small Innovative Missions for Planetary Exploration (SIMPLEx) AIAA Small Spacecraft Missions Conference August 4, 2019 Logan, Utah Apollo 15 Particles and Fields Subsatellite (PFS-1) • 35 kg spacecraft flown with Apollo 15 in 1971 • Orbited the Moon for 6 months • Science mission: • Measured the strength and direction of interplanetary and terrestrial magnetic fields • Detected variations in the lunar gravity field • Measured proton and electron flux 2 NASA SCIENCE AN INTEGRATED PROGRAM Helio- Earth physics Science Planetary Astrophysics Science Joint Agency Satellite Division 4 Small Spacecraft for Planetary Science Astrobiology Science and Technology Instrument Development (ASTID) 2008 • O/OREOS (2010 launch) Small Innovative Missions for Planetary Exploration (SIMPLEx-1) 2014 • LunaH-Map, Q-PACE Directed and Partnered Secondary Payloads • MarCO (2018 launch) • LICIA Cube (2021) – potential ASI contribution Planetary Science Deep Space SmallSat Studies (PSDS3) 2017 • 19 Studies – Presented March 2018 at LPSC Small Innovative Missions for Planetary Exploration (SIMPLEx-2) 2018 • Janus, Escapade, Lunar Trailblazer • Next proposals due no earlier than June 2020 5 Planetary Science Deep Space SmallSat Studies Solicitation requested: • Concepts for planetary science missions • 180 kg total spacecraft mass limit • $100M cost cap • No constraints on rides, infrastructure, etc. Solicitation sought answers to: • Can deep space missions be credibly done -

Pre-Launch Testing of the Lunar Flashlight (LF) Cubesat GNC System David C
Sternberg, D. C. et al. (2021): JoSS, Vol. 10, No. 1, pp. 959–981 (Peer-reviewed article available at www.jossonline.com) www.adeepakpublishing.com www. JoSSonline.com Pre-Launch Testing of the Lunar Flashlight (LF) CubeSat GNC System David C. Sternberg, Peter C. Lai, Aadil Rizvi, Kevin F. Ortega, Kevin D. Lo, Philippe C. Adell, and John D. Baker Jet Propulsion Laboratory California Institute of Technology Pasadena, CA, US Abstract Lunar Flashlight (LF) is a 6U, 14 kg spacecraft that will measure potential surface water ice deposits in the permanently shadowed region (PSR) of the moon. The mission described in this paper will use IR laser technology to search for volatiles in preparation for future human lunar exploration. A CubeSat’s guidance, navigation and control (GNC) system is crucial for the spacecraft to successfully reach the moon, enter a lunar orbit, and acquire scientific data. The Jet Propulsion Laboratory (JPL) has adopted a commercial-off-the-shelf (COTS) integrated GNC spacecraft system after experience from over twenty CubeSat missions. When hardware is delivered to JPL by the vendor, thorough validation testing is performed to guarantee fundamental functionality before the hard- ware is integrated into the spacecraft. Moreover, while the validation processes for the first few CubeSats relying on similar COTS-integrated GNC systems at JPL were very fluid, LF represents the first attempt JPL has made to apply large-mission, rigorous testing processes to a CubeSat, with the intent of standardizing the testing process for a rapidly growing number of CubeSats at JPL. This paper presents the rigorous testing concept applied to the GNC system, the various tests that have been performed and standardized, and the data acquired during the testing campaign to ensure that the LF GNC system will function as part of the integrated spacecraft once launched. -

Lunar Flashlight
https://ntrs.nasa.gov/search.jsp?R=20160008001 2019-08-29T23:45:10+00:00Z Lunar Flashlight Project Manager(s)/Lead(s) John Baker (PM)/Jet Propulsion Laboratory (818) 354–5004 Barbara Cohen (PI)/ZP13 (256) 961–7901 Amy Walden (Project Lead)/FP30 (256) 961–2358 Sponsoring Program(s) Human Exploration and Operations Mission Directorate Advanced Exploration Systems Figure 1: Artist concept of the Lunar Flashlight mission over the lunar surface. Project Description The Lunar Flashlight is a Jet Propulsion Laboratory project, with NASA Marshall Space Flight Center (MSFC) serving as the principal investigator and pro- viding the solar sail propulsion system. The goal of Lunar Flashlight is to determine the presence and abun- dance of exposed lunar water ice within permanently shadowed regions (PSRs) at the lunar south pole, and to map its concentration at the 1–2 km scale to sup- port future exploration and use. After being ejected in cis-lunar space by the launch vehicle, Lunar Flashlight deploys solar panels and an 85-m2 solar sail and maneu- vers into a low-energy transfer to lunar orbit. The solar sail and attitude control system work to bring the satel- lite into an elliptical polar orbit, spiraling down over a period of 18 months to a perilune of 30–10 km above the south pole for data collection. Lunar Flashlight uses Figure 2: Reflectivity testing of the material that will be used to build the Lunar Flashlight solar sail. its solar sail to shine reflected sunlight onto the lunar surface, measuring surface reflectance with a four-filter point spectrometer. -

KPLO, ISECG, Et Al…
NationalNational Aeronautics Aeronautics and Space and Administration Space Administration KPLO, ISECG, et al… Ben Bussey Chief Exploration Scientist Human Exploration & Operations Mission Directorate, NASA HQ 1 Strategic Knowledge Gaps • SKGs define information that is useful/mandatory for designing human spaceflight architecture • Perception is that SKGs HAVE to be closed before we can go to a destination, i.e. they represent Requirements • In reality, there is very little information that is a MUST HAVE before we go somewhere with humans. What SKGs do is buy down risk, allowing you to design simpler/cheaper systems. • There are three flavors of SKGs 1. Have to have – Requirements 2. Buys down risk – LM foot pads 3. Mission enhancing – Resources • Four sets of SKGs – Moon, Phobos & Deimos, Mars, NEOs www.nasa.gov/exploration/library/skg.html 2 EM-1 Secondary Payloads 13 CUBESATS SELECTED TO FLY ON INTERIM EM-1 CRYOGENIC PROPULSION • Lunar Flashlight STAGE • Near Earth Asteroid Scout • Bio Sentinel • LunaH-MAP • CuSPP • Lunar IceCube • LunIR • EQUULEUS (JAXA) • OMOTENASHI (JAXA) • ArgoMoon (ESA) • STMD Centennial Challenge Winners 3 3 3 Lunar Flashlight Overview Looking for surface ice deposits and identifying favorable locations for in-situ utilization in lunar south pole cold traps Measurement Approach: • Lasers in 4 different near-IR bands illuminate the lunar surface with a 3° beam (1 km spot). Orbit: • Light reflected off the lunar • Elliptical: 20-9,000 km surface enters the spectrometer to • Orbit Period: 12 hrs distinguish water -

SMALL SATELLITE CONFERENCE Thomas H
National Aeronautics and Space Administration SMALL SATELLITE CONFERENCE Thomas H. Zurbuchen Associate Administrator NASA Science - SmallSat Strategy Science Mission Directorate, NASA August 6, 2018 SmallSats/CubeSats and NASA Science • Enabling New Science • Innovation • Cultivating Mission Success 5 News Stories! 2 NASA Science SOLAR Mission Directorate JASD SYSTEM An Integrated Program Enabling Great Science HELIOPHYSICS ASTROPHYSICS EARTH 3 PetitSat CeREs SPARCS SPORT AERO SORTIE HALOSAT BURSTCUBE CIRBE CUTE TBEx CuPID REAL Q-PACE CuSP IPEX CYGNSS HYTI MinXSS-2 OCSD PREFIRE ALBUS CURIE LLITED TEMPEST-D CUBERRT LAICE CLICK ICECUBE DALI GTOSat ELFIN CPOD CIRIS-BATC RAVAN NEASCOUT HARP ACS3 BIOSENTINEL TROPICS EARTH SCIENCE MC/COVE-2 HELIOPHYSICS PLANETARY SCIENCE CTIM-FD ASTROPHYSICS LUNAR ICECUBE SNOOPI TECHNOLOGY & EXPLORATION MARCO CUBEQUEST CSIM-FD FUTURE MISSIONS IN BOLD CHALLENGE CSUNSAT-1 LUNAH-MAP LUNIR GRIFEX LUNAR FLASHLIGHT RAINCUBE AUGUST 2018 5 ISARA ~$100M Yearly Investment for SmallSats/CubeSats • Nearly $100M yearly investment for SmallSats/CubeSats • Manage technology innovation by leveraging partnerships and commercial efforts across disciplines • Invest in innovative early-stage research and technology to promote economic growth 6 7 Corner of Thermal Blanket High Gain Antenna (HGA) Discover the Secrets Mars Cube One (MarCO) The View from Deep Space (MarCO-B) of the Universe Earth HGA Feed (Illuminated from HGA reflection) Shadow of HGA Feed Moon Corner of Thermal Blanket 8 Orbit ground track for 60 -day science phase: -

Navy Space and Astronautics Orientation. INSTITUTION Bureau of Naval Personnel, Washington, D
DOCUMENT RESUME ED 070 566 SE 013 889 AUTHOR Herron, R. G. TITLE Navy Space and Astronautics Orientation. INSTITUTION Bureau of Naval Personnel, Washington, D. C.; Naval Personnel Program Support Activity, Washington, D. C. REPORT NO NAVPERS- 10488 PUB DATE 67 NOTE 235p. '2 EDRS PRICE MF-$0.65 HC-$9.87 DESCRIPTORS Aerospace Education; AerospaceTechnology; *Instructional Materials; Military Science; *Military Training; Navigatioti; *Post Secondary Education; *Space Sciences; *Supplementary Textbooks; Textbooks ABSTRACT Fundamental concepts of the spatial environment, technologies, and applications are presented in this manual prepared for senior officers and key civilian employees. Following basic information on the atmosphere, solar system, and intergalactic space, a detailed review is included of astrodynamics, rocket propulsion, bioastronautics, auxiliary spacecraft survival systems, and atmospheric entry.Subsequentlythere is an analysis of naval space facilities, and satellite applications, especially those of naval interests, are discussed with a background of launch techniques, spatial data gathering, communications programs ,of)servation techniques, measurements by geodetic and navigation systems. Included is a description of space defense and future developments of both national and international space programs. Moreover, commercial systems are mentioned, such as the 85-pound Early Bird (Intelsat I) Intelsat II series, global Intelsat III series, and Soviet-made elMolnlyan satellites. The total of 29 men and one woman orbiting the earth In-1961-67 are tabulated in terms of their names, flight series, launching dates, orbit designations, or biting periods,. stand-up periods, and extra vehicular activity records. Besides numerous illustrations, a list ofsignificantspace launches and a glossary of special terms are included in the manual appendices along with two tables of frequencybanddesignation.