Minix 3 Sobre Arquitectura
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
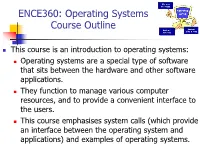
ENCE360: Operating Systems Course Outline
ENCE360: Operating Systems Course Outline This course is an introduction to operating systems: Operating systems are a special type of software that sits between the hardware and other software applications. They function to manage various computer resources, and to provide a convenient interface to the users. This course emphasises system calls (which provide an interface between the operating system and applications) and examples of operating systems. Lecture Topic Reading Laboratory Topic Introduction to Operating Systems MOS: Ch 1 C Revision Processes and Threads MOS: Ch 2 Scheduling (processes/threads) Threads, Processes Inter-process Communicatioin (pipes/sockets) MOS: pgs 43-45, 733-734 Concurrency Pipes, Files, Signals Input/Output MOS: Ch 5 Files and Directories MOS: Ch.4 Sockets LAB TEST 1 MID SEMESTER BREAK Memory Management - Caches MOS: Ch 3, 7.8 labs on OS examples, including Memory Management - Virtual Memory MOS: Sect 3.3 Xv6 (simple teaching OS) Virtualisation Distributed Systems Operating System Examples include: Windows, Linux, Android, macOS/iOS, real-time operating systems Assignment due Staff for Operating Systems Course Supervisor & Lecturer Dr Richard Green [email protected] Lecturer: Prof Mark Claypool [email protected] Tutor Gordon Beintmann [email protected] Laboratories There are two Labs begin the first week of term scheduled lab streams. For lab times and locations, check www.canterbury.ac.nz/tt All labs will be held in the department Self-allocate your lab via labs in the Erskine https://mytimetable.canterbury.ac.nz building. /aplus/apstudent Each student should If you hit any snags, email attend one 2-hour [email protected] lab each week. -

Certified Systems Matrix 12C Release 3 (12.3.2.0.0) E59961-07 July 2016
Oracle® Enterprise Manager Ops Center Certified Systems Matrix 12c Release 3 (12.3.2.0.0) E59961-07 July 2016 This guide lists the certified systems for Oracle Enterprise Manager Ops Center. The following topics are covered in this document: · Base Operating Systems · Base Browsers · Base Databases · Base Oracle Clusterware for High Availability · Target Operating Systems · Target Servers · Target Non-Server Hardware · Target Virtualization · Target Engineered Systems · Supported Technology Base Operating Systems This section describes the supported operating systems for the Enterprise Controller and Proxy Controller. Enterprise Controller Operating Systems This table lists the supported operating systems for the Enterprise Controller. Table 1-1 Enterprise Controller Operating Systems Enterprise Controller Operating Systems Certification Platform Version Minimum Update Level and Comments Oracle Solaris NA NA Oracle Solaris SPARC 10 Embedded Database: 1/13 Customer-Managed Database: 9/10 through 1/13 1 Table 1-1 (Cont.) Enterprise Controller Operating Systems Certification Platform Version Minimum Update Level and Comments Oracle Solaris SPARC 11 Embedded Database: 11.1 SRU 14.5 through 11.3 Customer-Managed Database: 11.0 SRU 10 through 11.3 Oracle Solaris 11 Express is not supported. Oracle Solaris SPARC 10 Embedded Database: 1/13 Local Zone Customer-Managed Database: 9/10 through 1/13 Oracle Solaris SPARC 11 Embedded Database: 11.1 SRU 14.5 through Local Zone 11.3 Customer-Managed Database: 11.0 SRU 10 through 11.3 Oracle Solaris 11 Express is not supported. Oracle VM Server for 10 Embedded Database: 1/13 SPARC Customer-Managed Database: 9/10 through 1/13 Oracle VM Server for 11 Embedded Database: 11.1 SRU 14.5 through SPARC 11.3 Customer-Managed Database: 11.0 SRU 10 through 11.3 Oracle Solaris 11 Express is not supported. -
How to Configure the NFX250 Nextgen
How to Configure the NFX250 NextGen Published 2021-04-20 ii Juniper Networks, Inc. 1133 Innovation Way Sunnyvale, California 94089 USA 408-745-2000 www.juniper.net Juniper Networks, the Juniper Networks logo, Juniper, and Junos are registered trademarks of Juniper Networks, Inc. in the United States and other countries. All other trademarks, service marks, registered marks, or registered service marks are the property of their respective owners. Juniper Networks assumes no responsibility for any inaccuracies in this document. Juniper Networks reserves the right to change, modify, transfer, or otherwise revise this publication without notice. How to Configure the NFX250 NextGen Copyright © 2021 Juniper Networks, Inc. All rights reserved. The information in this document is current as of the date on the title page. YEAR 2000 NOTICE Juniper Networks hardware and software products are Year 2000 compliant. Junos OS has no known time-related limitations through the year 2038. However, the NTP application is known to have some difficulty in the year 2036. END USER LICENSE AGREEMENT The Juniper Networks product that is the subject of this technical documentation consists of (or is intended for use with) Juniper Networks software. Use of such software is subject to the terms and conditions of the End User License Agreement ("EULA") posted at https://support.juniper.net/support/eula/. By downloading, installing or using such software, you agree to the terms and conditions of that EULA. iii Table of Contents About This Guide | x 1 Overview NFX250 -

Escuela Técnica Superior De Ingenieros De Telecomunicación
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS DE TELECOMUNICACIÓN TRABAJO FIN DE GRADO GRADO EN INGENIERÍA DE TECNOLOGÍAS ESPECÍFICAS DE TELECOMUNICACIÓN MENCIÓN EN TELEMÁTICA APLICACIÓN ANDROID PARA EL ENTRENAMIENTO COGNITIVO DE PERSONAS BAJO TUTELA JURÍDICA CON DISCAPACIDAD INTELECTUAL O DEL DESARROLLO AUTOR: D. RAÚL VELASCO CAMINERO TUTORA: DRA. DÑA. MÍRIAM ANTÓN RODRÍGUEZ VALLADOLID, ENERO de 2017 TÍTULO: Aplicación Android para el entrenamiento cognitivo de personas bajo tutela jurídica con discapacidad intelectual o del desarrollo AUTOR: D. Raúl Velasco Caminero TUTORA: Dra. Dña. Míriam Antón Rodríguez DEPARTAMENTO: Teoría de la Señal y Comunicaciones e Ingeniería Telemática TRIBUNAL PRESIDENTE: Míriam Antón Rodríguez VOCAL: Mario Martínez Zarzuela SECRETARIO: David González Ortega SUPLENTE: Francisco Javier Díaz Pernas SUPLENTE: Mª Ángeles Pérez Juárez FECHA: CALIFICACIÓN: 3 Resumen El objetivo principal de este proyecto consiste en el desarrollo de una aplicación para la plataforma Android con el fin de tratar de mejorar las capacidades cognitivas de los tutelados a través de juegos desarrollados específicamente para tal fin. Aunque esta es la funcionalidad principal que se ofrece, la aplicación va más allá. Permite llevar un seguimiento de cada tutelado y crear y ver los detalles de los mismos. También permite ver estadísticas de los tutelados en los distintos juegos para ver su desarrollo y mejora. La aplicación es un sistema de seguimiento y rehabilitación donde los voluntarios introducen sus credenciales para poder acceder a todas las funcionalidades citadas anteriormente que ofrece la aplicación. El sistema está desarrollado en Java utilizando el IDE Android Studio y puede utilizarse en cualquier dispositivo que disponga de Android 4.0 o superior como sistema operativo. -

A Framework for Visual Modular Design of Educational Operating System
A Framework for Visual Modular Design of Educational Operating System Naeem Al-Oudat Communications and Computer Engineering Department, Tafila Technical University, Jordan [email protected] Abstract— Operating systems are a vital part in most • Memory manager. Utilizing the RAM and its computing systems. However, learning basic concepts of extensions in an efficient way is the role of this operating systems are hard for normal students although they component. are necessary and important. State of the art in teaching • File system. The main job of this component is to operating systems depends on studying existing open source operating systems like Linux, hacking teaching operating abstract the way of dealing with data and storing it in systems like Xv6, or using simulators. Difficulties of learning a permanent media as a hard disk. still there in these methods, since they require a great deal of Designing an environment where learners can work and system programming techniques. In this paper, we propose a design the above basic components of an operating system novel direction in learning operating systems that is solely without getting into the complicated details is an urgent need dependent on visually building the operating system. By using in today’s university classes of software systems. This this method, we mitigated the complexity of going into system simplicity should not make the whole process as a programming details. The development platform consists of key simulation/emulation-like design. A good option would be building blocks that a user can drag and drop into a working using pre-programmed components. The learner can select panel to build his own operating system. -

Mejora Del Comando En Ps En Minix
MEJORA DEL COMANDO PS EN MINIX. INGENIERIA TECNICA INFORMATICA DE GESTION 2007 1 INTRODUCCIÓN......................................................................................................................................3 OBJETIVO .................................................................................................................................................3 FUNDAMENTOS TEÓRICOS.................................................................................................................3 • FICHERO MINIX/PROC.H.....................................................................................................................3 • FICHERO MINIX/CONF.H.....................................................................................................................3 • FICHERO MINIX/CONFIG.H ................................................................................................................3 • FICHERO MINIX/MPROG.H..................................................................................................................3 • FICHERO USR/LOCAL/SMX/SRC/FS/FPROG.H.......................................................................................4 DESCRIPCIÓN DEL TRABAJO REALIZADO....................................................................................4 PASOS SEGUIDOS PARA LA CREACIÓN DEL PROYECTO..........................................................5 CONCLUSIONES......................................................................................................................................6 -

The Development of Unix
The development of Unix ∗ By Kasper Edwards Departmnent of Technology and Social Sciences, Technical University of Denmark Building 303 East, room 150, 2800 Lyngby, Denmark. (email: [email protected]) ABSTRACT This paper tells the story of the development of the Unix time sharing system. The development at AT&T and the MULTICS roots are uncovered. The events are presented in chronological order from 1969 to 1995. The Berkeley Software Distribution (BSD) are presented as well as the Free Software Foundation and other. Note: This is a working paper. Short sections of text, no more than two paragraphs may be quoted without permission provided that full credit is given to the source. Copyright © 2000-2001 by Kasper Edwards, all rights reserved. Comments are welcome to [email protected]. ∗ I would like to thank Keld Jørn Simmonsen, Ass. Prof. Jørgen Lindgaard Pedersen of the Technical University of Denmark and Ass. Prof. Jørgen Steensgaard for helpful comments and suggestions on earlier drafts on this paper. I assume full responsibility for any remaining vulnerabilities. Page 1 of 31 1.1 Introduction This thesis about Linux, however Linux is called a Unix clone in the sense that it looks like, and are designed on the same principles as Unix. Both Unix and Linux are POSIX (Portable Operating System Interface) compliant (described in paragraph 3.29). In short POSIX describes the Unix user interface, i.e. commands and their syntax. Some Unix’es are certified POSIX compliant but no one have yet been willing to pay a third party company to test the POSIX compliance of Linux. -

Planificación De Procesos
ETSISI - UPM Sistemas Operativos Curso 20/21 PRÁCTICA 3 Planificación de procesos 15 de Octubre 2020 ETSISI - UPM Sistemas Operativos Curso 20/21 ÍNDICE 1 OBJETIVOS ................................................................................................................................................... 2 2 ENUNCIADO ................................................................................................................................................. 2 3 JUGANDO CON LA POLÍTICA DE PLANIFICACIÓN ............................................................................. 2 4 PRIMERA APROXIMÁCIÓN ....................................................................................................................... 5 5 UNA SOLUCIÓN MÁS ADECUADA .......................................................................................................... 7 6 PUNTUACIÓN ............................................................................................................................................... 8 7 ANEXOS......................................................................................................................................................... 9 7.1 Fichero de pruebas: prueba1.c ................................................................................................................. 9 7.2 Fichero de pruebas: prueba2.c ................................................................................................................. 9 7.3 Fichero de pruebas: prueba3.c .............................................................................................................. -

Computer Architectures an Overview
Computer Architectures An Overview PDF generated using the open source mwlib toolkit. See http://code.pediapress.com/ for more information. PDF generated at: Sat, 25 Feb 2012 22:35:32 UTC Contents Articles Microarchitecture 1 x86 7 PowerPC 23 IBM POWER 33 MIPS architecture 39 SPARC 57 ARM architecture 65 DEC Alpha 80 AlphaStation 92 AlphaServer 95 Very long instruction word 103 Instruction-level parallelism 107 Explicitly parallel instruction computing 108 References Article Sources and Contributors 111 Image Sources, Licenses and Contributors 113 Article Licenses License 114 Microarchitecture 1 Microarchitecture In computer engineering, microarchitecture (sometimes abbreviated to µarch or uarch), also called computer organization, is the way a given instruction set architecture (ISA) is implemented on a processor. A given ISA may be implemented with different microarchitectures.[1] Implementations might vary due to different goals of a given design or due to shifts in technology.[2] Computer architecture is the combination of microarchitecture and instruction set design. Relation to instruction set architecture The ISA is roughly the same as the programming model of a processor as seen by an assembly language programmer or compiler writer. The ISA includes the execution model, processor registers, address and data formats among other things. The Intel Core microarchitecture microarchitecture includes the constituent parts of the processor and how these interconnect and interoperate to implement the ISA. The microarchitecture of a machine is usually represented as (more or less detailed) diagrams that describe the interconnections of the various microarchitectural elements of the machine, which may be everything from single gates and registers, to complete arithmetic logic units (ALU)s and even larger elements. -

Secure Computation Systems for Confidential Data Analysis By
Secure Computation Systems for Confidential Data Analysis by Rishabh Poddar A dissertation submitted in partial satisfaction of the requirements for the degree of Doctor of Philosophy in Computer Science in the Graduate Division of the University of California, Berkeley Committee in charge: Professor Raluca Ada Popa, Chair Professor Ion Stoica Professor Sylvia Ratnasamy Professor Deirdre Mulligan Fall 2020 Secure Computation Systems for Confidential Data Analysis Copyright 2020 by Rishabh Poddar 1 Abstract Secure Computation Systems for Confidential Data Analysis by Rishabh Poddar Doctor of Philosophy in Computer Science University of California, Berkeley Professor Raluca Ada Popa, Chair A large number of services today are built around processing data that is collected from or shared by customers. While such services are typically able to protect the data when it is in transit or in storage using standard encryption protocols, they are unable to extend this protection to the data when it is being processed, making it vulnerable to breaches. This not only threatens data confidentiality in existing services, it also prevents customers from availing such services altogether for sensitive workloads, in that they are unwilling / unable to share their data out of privacy concerns, regulatory hurdles, or business competition. Existing solutions to this problem are unable to meet the requirements of advanced data analysis applications. Systems that are efficient do not provide strong enough security guarantees, and approaches with stronger security are often not efficient. To address this problem, the work in this dissertation develops new systems and protocols for securely computing on encrypted data, that attempt to bridge the gap between security and efficiency. -

PRÁCTICA 3 Planificación De Procesos
E.T.S.I.S.I. Sistemas Operativos Curso 19/20 PRÁCTICA 3 Planificación de procesos VERSIÓN BETA Adaptación (P. P. López) para Windows de practica3.pdf (P. Carazo) Página - 1 E.T.S.I.S.I. Sistemas Operativos Curso 19/20 ÍNDICE 1 OBJETIVOS ........................................................................................................................ 3 2 ENUNCIADO ..................................................................................................................... 3 3 JUGANDO CON LA POLÍTICA DE PLANIFICACIÓN ................................................. 3 4 PRIMERA APROXIMÁCIÓN ......................................................................................... 23 5 UNA SOLUCIÓN MÁS ADECUADA ............................................................................ 24 6 PUNTUACIÓN ................................................................................................................. 25 Página - 2 E.T.S.I.S.I. Sistemas Operativos Curso 19/20 1 OBJETIVOS Los objetivos de esta práctica son: • Entender la política de planificación de procesos de MINIX • Modificar la política de planificación de procesos de MINIX 2 ENUNCIADO Lo que se pide en esta práctica es modificar la estrategia de planificación de procesos de MINIX 3 (transparencia 86 de procesos.ppt) atendiendo a los criterios siguientes: 1. La política de planificación no debe modificar la prioridad de un proceso (sí podría modificarla algún comando externo al planificador) 2. En el momento de determinar qué proceso debe ejecutarse, se seleccionará -

Volume #37 Spring 2019
Volume #37 Spring 2019 The Forum Official Publication of Phi Sigma Iota International Foreign Language Honor Society Volume 37 Spring 2019 In This Issue FROM THE COMITIUM page 1 This column carries reports of the Executive Committee of Phi Sigma Iota. Please send comments to [email protected] to the attention of Mirna Trauger, President. FROM THE CURIA page 5 The Curia, a section devoted to guest contributors, features a poem in memory. of Taylor Bonora, a Spanish language student and Phi Sigma Iota member at Cal State Chico, who lost her battle with cancer. In addition, read how two chapters celebrated foreign language and culture on their campuses to increase visability and celebrate cultural diversity. FROM THE ROSTRUM page 8 Phi Sigma Iota exists to recognize students who excel in language learning. The experiences of learning a new language or of becoming better acquainted with a culture other than one’s own are unique to each student. The Rostrum offers student members of Phi Sigma Iota the opportunity to publish their original writing about these experiences. REPORTS FROM THE 2017-2018 SCHOLARSHIP RECIPIENTS page 33 IT’S ALL ABOUT US! page 40 In this section, we publish your chapter news and photographs. We also report new chapter charters. Let us hear from you! Send news and pictures to Administrative Director Roz Macken at [email protected]. Editor, Kajsa C. Larson Associate Professor of Spanish Gamma Phi Chapter #222 Northern Kentucky University FROM THE COMITIUM: President’s Letter As I begin my second year as president, I would like to share with you what a pleasure it has been to serve on the Executive Board of Phi Sigma Iota.