Electrical Measurements & Instrumentation
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

1806-A Electronic Voltmeter, Manual
OPERATING INSTRUCTIONS TYPE 1806-A ELECTRONIC VOLTMETER Form 1806-0100-C March, 1967 Copyright 1963 General Radio Company West Concord, Massachusetts, USA GENERAL RADIO COMPANY WEST CONCORD, MASSACHUSETTS, USA SPECIFICATIONS DC VO~TMETER Voltage Ro.nge: Four ranges, 1.5, 15, 150, and 1500 V, full scale, positive or negative. Minimum reading is 0.005 V. Input Resistance: 100 M!'l, ±5%; also "open grid" on all but the 1500-V range. Grid current is less than I0-10 A. Accuracy: ±2% of indicated value from one-tenth of full scale to full scale; ±0.2% of full scale from one-tenth of full scale to zero. Scale is logarithmic from one-tenth of full scale to full scale, permitting constant-percentage readability over that range. AC VOLTMETER Voltage Range: Four ranges, 1.5, 15, 150, and 1500 V, full scale. Minimum reading on most sensitive range is 0.1 V. Input Impedance: Probe, approximately 25 Mn in parallel with 2 pF; with TYPE 1806-P2 Range Multiplier, 2500 M!'l in parallel with 2 pF; at binding post on panel, 25 Mn in parallel with 30 pF. Accuracy: At 400 c/ s, ±2% of indicated value from 1.5 V to 1500 V; ±3% of indicated value from 0.1 V to 1.5 V. Waveform Error: On the higher ac-voltage ranges, the instrument operates as a peak voltmeter, calibrated to read rms values of a sine wave or 0.707 of the peak value of a complex wave. On distorted waveforms the percentage deviation of the reading from the rms value may be as large as the percentage of harmonics present. -

The Accuracy Comparison of Oscilloscope and Voltmeter Utilizated in Getting Dielectric Constant Values
Proceeding The 1st IBSC: Towards The Extended Use Of Basic Science For Enhancing Health, Environment, Energy And Biotechnology 211 ISBN: 978-602-60569-5-5 The Accuracy Comparison of Oscilloscope and Voltmeter Utilizated in Getting Dielectric Constant Values Bowo Eko Cahyono1, Misto1, Rofiatun1 1 Physics Departement of MIPA Faculty, Jember University, Jember – Indonesia, e-mail: [email protected] Abstract— Parallel plate capacitor is widely used as a sensor for many purposes. Researches which have used parallel plate capacitor were investigation of dielectric properties of soil in various temperature [1], characterization if cement’s dielectric [2], and measuring the dielectric constant of material in various thickness [3]. In the investigation the changing of dielectric constant, indirect method can be applied to get the dielectric constant number by measuring the voltage of input and output of the utilized circuit [4]. Oscilloscope is able to measure the voltage value although the common tool for that measurement is voltmeter. This research aims to investigate the accuracy of voltage measurement by using oscilloscope and voltmeter which leads to the accuracy of values of dielectric constant. The experiment is carried out by an electric circuit consisting of ceramic capacitor and sensor of parallel plate capacitor, function generator as a current source, oscilloscope, and voltmeters. Sensor of parallel plate capacitor is filled up with cooking oil in various concentrations, and the output voltage of the circuit is measured by using oscilloscope and also voltmeter as well. The resulted voltage values are then applied to the equation to get dielectric constant values. Finally the plot is made for dielectric constant values along the changing of cooking oil concentration. -
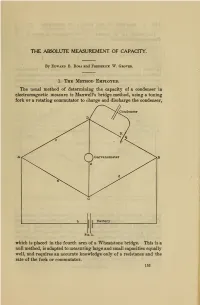
The Absolute Measurement of Capacity
THE ABSOLUTE MEASUREMENT OF CAPACITY. By Edwakd B. Rosa and Frederick "W. Grover. 1. The Method Employed. The usual method of determining the capacity of a condenser in electromagnetic measure is Maxwell's bridge method, using a tuning fork or a rotating commutator to charge and discharge the condenser, Fig. 1. which is placed in the fourth arm of a Wheatstone bridge. This is a null method, is adapted to measuring large and small capacities equally well, and requires an accurate knowledge only of a resistance and the rate of the fork or commutator. 153 154 BULLETIN OF THE BUREAU OF STANDARDS. [vol.1, no. 2. The formula for the capacity C of the condenser as given by J. J Thomson, is as follows: * i_L a (a+h+d){a+c+g) 0= (1) ncd \} +c{a+l+d))\} + d(a+c+g)) in which <z, c, and d are the resistances of three arms of a Wheatstone bridge, b and g are battery and galvanometer resistances, respectively, and n is the number of times the condenser is charged and discharged per second. When the vibrating arm P touches Q the condenser is charged, and when it touches P it is short circuited and discharged. When Pis not touching Q the arm BD of the bridge is interrupted and a current flows from D to C through the galvanometer; when P touches Q the condenser is charged by a current coming partly through c and partly through g from C to D. Thus the current through the galvanometer is alternately in opposite directions, and when these opposing currents balance each other there is no deflection of the gal- vanometer. -

AC & DC True RMS Current and Voltage Transducer Wattmeter
AC & DC true RMS current and voltage transducer Wattmeter, Voltmeter, Ammeter,…. Type CPL35 • Continuous or alternative RMS measures: Single-phase or balanced three-phase 0...440 Hz PWM, wave train, Phase angle variation, AC All high level harmonics signals • multi-sensor for current measurement: Shunt, transformer, Rogowski coil, Hall effect sensor or direct input 1A/ 5A • Programmable: Voltmeter, ammeter, wattmeter, varmeter, power factor, Cos phi, frequency meter • 4 digits measure display U, I, Cos, P, Q, Hz DC+AC • Up to 2 isolated analog outputs and 2 relay outputs • Wide range universal ac/dc power supply The CPL35 is a converter for measuring, monitoring and retransmission of electrical parameters. Implementa- tion is fast by simple configuration of transformer ratio or shunt sensitivity. The various output options allow a wide range of application: measurement, protection, control. Measurement: Block diagram: - DC or AC, single-phase or balanced three-phase network (configurable TP, CT ratio or shunt sensitivity), - 2 voltage calibers: 150V, 600V others on request up to 1000V, - 3 current calibers: 200mV (external shunt) ,1A or 5A internal shunt, - Hall effect current sensor (+/-4V input) - active (P), reactive (Q), apparent (S) powers, - cos (power factor) , frequency 1Hz…..440 Hz, - configurable integration time from 10 ms to 60 seconds for the measurement in slow waves train applications. Front face: - 4 digit alphanumeric LED matrix display for the measurement, - 2 red LEDs to display the status of relays, - 2 push buttons for: * The complete configuration of the device * Selecting the displayed value (U, I, Cos, P, Q, S, Hz) * Setting of alarm thresholds, ....... Relays (/R option): Up to 2 configurable relays: - In alarm, monitoring measure selection (U, I, Cos, P, Q, S, Hz), - Threshold, direction, hysteresis and delay individually adjustable on Associated current sensors each relay (on & off delay), shunt current transformer Hall effect sensor Rogowski coil - HOLD function (alarm storage with RESET by front face). -

Equivalent Resistance
Equivalent Resistance Consider a circuit connected to a current source and a voltmeter as shown in Figure 1. The input to this circuit is the current of the current source and the output is the voltage measured by the voltmeter. Figure 1 Measuring the equivalent resistance of Circuit R. When “Circuit R” consists entirely of resistors, the output of this circuit is proportional to the input. Let’s denote the constant of proportionality as Req. Then VRIoeq= i (1) This is the same equation that we would get by applying Ohm’s law in Figure 2. Figure 2 Interpreting the equivalent circuit. Apparently Circuit R in Figure 1 acts like the single resistor Req in Figure 2. (This observation explains our choice of Req as the name of the constant of proportionality in Equation 1.) The constant Req is called “the equivalent resistance of circuit R as seen looking into the terminals a- b”. This is frequently shortened to “the equivalent resistance of Circuit R” or “the resistance seen looking into a-b”. In some contexts, Req is called the input resistance, the output resistance or the Thevenin resistance (more on this later). Figure 3a illustrates a notation that is sometimes used to indicate Req. This notion indicates that Circuit R is equivalent to a single resistor as shown in Figure 3b. Figure 3 (a) A notion indicating the equivalent resistance and (b) the interpretation of that notation. Figure 1 shows how to calculate or measure the equivalent resistance. We apply a current input, Ii, measure the resulting voltage Vo, and calculate Vo Req = (1) Ii The equivalent resistance can also be measured using and ohmmeter as shown in Figure 4. -

Energy and Power Meters Catalogue for Panel Builders
Schneider Electric Energy and power meters catalogue for Panel Builders www.schneider-electric.com Schneider Electric Energy and power meters catalogue for panel builders Contents Introduction 3 Selection guide panorama 4 Current transformers 7 Panel instruments 18 Basic energy metering IEM2000 series, IEM3000 series 29 Basic multi-function metering PM3000 series, PM5000 series 43 Communications and gateways Link150, Com’X 200, Com’X 210, Com’X 510 59 Commercial reference numbers See your Schneider Electric representative for complete ordering information. 76 Clicking on a Commercial Reference Number or scanning the product’s QR Code links you to further product information on www.schneider-electric.com www.schneider-electric.com PANEL BUILDERS CATALOGUE FUNCTIONS AND CHARACTERISTICS Why Panel Builders Choose Schneider Electric? Schneider Electric is the global specialist in energy management and as such it has the most complete power motoring product line, going from simple indicators (analogue meters) and CTs, to world class accurate energy meters and powerful compact power meters. These proven products come with multiple options to satisfy any requirement. Schneider Electric products are safe and reliable. We comply with the most stringent standards, including IEC, MID, UL, etc., and we thoroughly test all products with third-party laboratories. This gives our partners the peace of mind and the confidence that they are maintaining a good reputation while delivering the best value in equipment and service to their customers. Our products are simple to install, configure, and use. This saves our partners time and money and lets them deliver the best solutions in a timely and cost-effective manner. -

Calibration Methods – Nomenclature and Classification
CHAPTER 8 CALIBRATION METHODS – NOMENCLATURE AND CLASSIFICATION Paweł Kościelniak Institute of Analytical Chemistry, Faculty of Chemistry, Jagiellonian University, R. Ingardena 3, 30-060 Kraków, Poland ABSTRACT Reviewing the analytical literature, including academic textbooks, one can notice that in fact there is no precise and clear terminology dealing with the analytical calibration. Especially a great confusion exists in nomenclature related to the calibration methods: not only different names are used with reference to a given method, but they do not express the principles and the nature of different methods properly (e.g. "the set of standard method" or "the internal standard method"). The problem mentioned above is of great importance. A lack of good terminology can be a source of misunderstandings and, consequently, can be even a reason of carrying out an analytical treatment against the rules. Finally, the aspect of rather psychological nature is worth to be stressed, namely just an analyst is (or should be at least) especially sensitive to such terms as "order" and "purity" irrespectively of what analytical area is considered. Chapter 8 1 INTRODUCTION Reading the professional literature, one is bound to arrive at the conclusion that in analytical chemistry there is a lack of clearly defined, current nomenclature relating to the problems of analytical calibration. It is characteristic that, among other things, in spite of the inevitable necessity of carrying out calibration in instrumental analysis and the common usage of the term ‘analytical calibration’ itself, it is not defined even in texts on nomenclature problems in chemistry [1,2], or otherwise the definitions are not connected with analytical practice [3]. -

Pressure Measuring Instruments
testo-312-2-3-4-P01 21.08.2012 08:49 Seite 1 We measure it. Pressure measuring instruments For gas and water installers testo 312-2 HPA testo 312-3 testo 312-4 BAR °C www.testo.com testo-312-2-3-4-P02 23.11.2011 14:37 Seite 2 testo 312-2 / testo 312-3 We measure it. Pressure meters for gas and water fitters Use the testo 312-2 fine pressure measuring instrument to testo 312-2 check flue gas draught, differential pressure in the combustion chamber compared with ambient pressure testo 312-2, fine pressure measuring or gas flow pressure with high instrument up to 40/200 hPa, DVGW approval, incl. alarm display, battery and resolution. Fine pressures with a resolution of 0.01 hPa can calibration protocol be measured in the range from 0 to 40 hPa. Part no. 0632 0313 DVGW approval according to TRGI for pressure settings and pressure tests on a gas boiler. • Switchable precision range with a high resolution • Alarm display when user-defined limit values are • Compensation of measurement fluctuations caused by exceeded temperature • Clear display with time The versatile pressure measuring instrument testo 312-3 testo 312-3 supports load and gas-rightness tests on gas and water pipelines up to 6000 hPa (6 bar) quickly and reliably. testo 312-3 versatile pressure meter up to Everything you need to inspect gas and water pipe 300/600 hPa, DVGW approval, incl. alarm display, battery and calibration protocol installations: with the electronic pressure measuring instrument testo 312-3, pressure- and gas-tightness can be tested. -

A Measuring Instrument for Multipoint Soil Temperature Underground
A MEASURING INSTRUMENT FOR MULTIPOINT SOIL TEMPERATURE UNDERGROUND Cheng Wang, Chunjiang Zhao * , Xiaojun Qiao, Zhilong Xu National Engineering Research Center for Information Technology in Agriculture, Beijing, P. R. China, 100097 * Corresponding author, Address: Shuguang Huayuan Middle Road 11#, Beijing, 100097, P. R. China, Tel: +86-10-51503411, Fax: +86-10-51503449, Email: [email protected] Abstract: A new measuring instrument for 10 points soil temperatures in 0–50 centimeters depth underground was designed. System was based on Silicon Laboratories’ MCU C8051F310, single chip digital temperature sensor DS18B20, and other peripheral circuits. It was simultaneously able to measure, memory and display, and also convey data to computer via a standard RS232 interface. Keywords: Multi-point Soil Temperature; Portable; DS18B20; C8051F310 1. INTRODUCTION The temperature of soil is a vital environmental factor, which directly influences the activity of microorganisms and the decomposition of organic substances. It can affect roots absorbing water and mineral elements. It also plays an important role in the growth rate and range of roots. Statistically, roots of most plants are within 50 centimeters underground, so it becomes very significant to measure the soil temperature of different depth in this level. The Soil Temperature Measuring Instruments used nowadays mainly fall into three types, the first type is the measure temperature by making use of the relationship between the soil temperature and the temperature-sensitive resistor. Before using this sort of instruments, the system parameters need to Wang, C., Zhao, C., Qiao, X. and Xu, Z., 2008, in IFIP International Federation for Information Processing, Volume 259; Computer and Computing Technologies in Agriculture, Vol. -
Made to Measure. Practical Guide to Electrical Measurements in Low Voltage Switchboards V
Contact us A 250 500 200 150 V (b) 100 (a) 50 0 t Made to measure. Practical guide to electrical measurements in low voltage switchboards A 250 500 ABB SACE The data and illustrations are not binding. We reserve 200 the right to modify the contents of this document on the 150 Una divisione di ABB S.p.A. basis of technical development of the products, 100 Apparecchi Modulari without prior notice. 50 0 Viale dell’Industria, 18 Copyright 2010 ABB. All rights reserved. - 1.500 - CAL. 20010 Vittuone (MI) Tel.: 02 9034 1 Fax: 02 9034 7609 bol.it.abb.com www.abb.com V 80 V 60 2CSC445012D0201 - 12/2010 (f) 40 50 Hz 20 0 t Made to measure. Practical guide to electrical measurements in low voltage switchboards table of Made to measure. Practical guide to electrical measurements contents in low voltage switchboards 1 Electrical measurements 5.3.2 Current transformers ......................................................... 37 5.3.3 Voltage transformers ......................................................... 38 1.1 Why is it important to measure? .......................................... 3 5.3.4 Shunts for direct current .................................................... 38 1.2 Applicational contexts .......................................................... 4 1.3 Problems connected with energy networks ......................... 4 6 The measurements 1.4 Reducing consumption ........................................................ 7 1.5 Table of charges .................................................................. 8 6.1 TRMS Measurements -
An Analysis of Inertial Seisometer-Galvanometer
NBSIR 76-1089 An Analysis of Inertial Seisdmeter-Galvanorneter Combinations D. P. Johnson and H. Matheson Mechanics Division Institute for Basic Standards National Bureau of Standards Washington, D. C. 20234 June 1976 Final U. S. DEPARTMENT OF COMMERCE NATIONAL BUREAU Of STANDARDS • TABLE OF CONTENTS Page SECTION 1 INTRODUCTION ^ 1 . 1 Background 1.2 Scope ^ 1.3 Introductory Details 2 ELECTROMAGNETIC SECTION 2 GENERAL EQUATIONS OF MOTION OF AN INERTIAL SEISMOMETER 3 2.1 Dynaniical Theory 2 2.1.1 Mechanics ^ 2.1.2 Electrodynamics 5 2.2 Choice of Coordinates ^ 2.2.1 The Coordinate of Earth Motion 7 2.2.2 The Coordinate of Bob Motion 7 2.2.3 The Electrical Coordinate 7 2.2.4 The Magnetic Coordinate 3 2.3 Condition of Constraint: Riagnet 3 2.4 The Lagrangian Function • 2.4.1 Mechanical Kinetic Energy 10 2.4.2 Electrokinetic and Electro- potential Energy H 2.4.3 Gravitational Potential Energy 12 2.4.4 Mechanical Potential Energy 13 2.5 Tne General Equations of Motion i4 2.6 The Linearized Equations of Motion 2.7 Philosophical Notes and Interpretations 18 2.8 Extension to Two Coil Systems 18 2.8.1 General 2.8.2 Equations of Motion -^9 2.8.3 Reciprocity Calibration Using the Basic Instrument 21 2.8.4 Reciprocity Calibration Using Auxiliary Calibrating Coils . 23 2.9 Application to Other Electromagnetic Transducers - SECTION 3 RESPONSE CFARACTERISTICS OF A SEISMOMETER WITH A- RESISTIVE LOAD 3.1 Introduction 3.2 Seismometer with Resistive Load II TABLE GF CONTENTS Page 3.2.1 Steady State Response 27 3. -

Electrical & Electronics Measurement Laboratory Manual
DEPT. OF I&E ENGG. DR, M, C. Tripathy CET, BPUT Electrical & Electronics Measurement Laboratory Manual By Dr. Madhab Chandra Tripathy Assistant Professor DEPARTMENT OF INSTRUMENTAION AND ELECTRONICS ENGINEERING COLLEGE OF ENGINEERING AND TECHNOLOGY BHUBANESWAR-751003 PAGE 1 | EXPT - 1 ELECTRICAL &ELECTRONICS MEASUREMENT LAB DEPT. OF I&E ENGG. DR, M, C. Tripathy CET, BPUT List of Experiments PCEE7204 Electrical and Electronics Measurement Lab Select any 8 experiments from the list of 10 experiments 1. Measurement of Low Resistance by Kelvin’s Double Bridge Method. 2. Measurement of Self Inductance and Capacitance using Bridges. 3. Study of Galvanometer and Determination of Sensitivity and Galvanometer Constants. 4. Calibration of Voltmeters and Ammeters using Potentiometers. 5. Testing of Energy meters (Single phase type). 6. Measurement of Iron Loss from B-H Curve by using CRO. 7. Measurement of R, L, and C using Q-meter. 8. Measurement of Power in a single phase circuit by using CTs and PTs. 9. Measurement of Power and Power Factor in a three phase AC circuit by two-wattmeter method. 10. Study of Spectrum Analyzers. PAGE 2 | EXPT - 1 ELECTRICAL &ELECTRONICS MEASUREMENT LAB DEPT. OF I&E ENGG. DR, M, C. Tripathy CET, BPUT DO’S AND DON’TS IN THE LAB DO’S:- 1. Students should carry observation notes and records completed in all aspects. 2. Correct specifications of the equipment have to be mentioned in the circuit diagram. 3. Students should be aware of the operation of equipments. 4. Students should take care of the laboratory equipments/ Instruments. 5. After completing the connections, students should get the circuits verified by the Lab Instructor.