Variational Approaches to Water Wave Simulations
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Experimental Observation of Modulational Instability in Crossing Surface Gravity Wavetrains
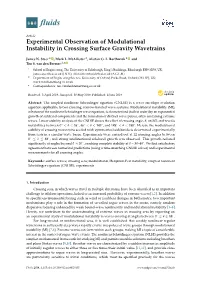
fluids Article Experimental Observation of Modulational Instability in Crossing Surface Gravity Wavetrains James N. Steer 1 , Mark L. McAllister 2, Alistair G. L. Borthwick 1 and Ton S. van den Bremer 2,* 1 School of Engineering, The University of Edinburgh, King’s Buildings, Edinburgh EH9 3DW, UK; [email protected] (J.N.S.); [email protected] (A.G.L.B.) 2 Department of Engineering Science, University of Oxford, Parks Road, Oxford OX1 3PJ, UK; [email protected] * Correspondence: [email protected] Received: 3 April 2019; Accepted: 30 May 2019; Published: 4 June 2019 Abstract: The coupled nonlinear Schrödinger equation (CNLSE) is a wave envelope evolution equation applicable to two crossing, narrow-banded wave systems. Modulational instability (MI), a feature of the nonlinear Schrödinger wave equation, is characterized (to first order) by an exponential growth of sideband components and the formation of distinct wave pulses, often containing extreme waves. Linear stability analysis of the CNLSE shows the effect of crossing angle, q, on MI, and reveals instabilities between 0◦ < q < 35◦, 46◦ < q < 143◦, and 145◦ < q < 180◦. Herein, the modulational stability of crossing wavetrains seeded with symmetrical sidebands is determined experimentally from tests in a circular wave basin. Experiments were carried out at 12 crossing angles between 0◦ ≤ q ≤ 88◦, and strong unidirectional sideband growth was observed. This growth reduced significantly at angles beyond q ≈ 20◦, reaching complete stability at q = 30–40◦. We find satisfactory agreement between numerical predictions (using a time-marching CNLSE solver) and experimental measurements for all crossing angles. -

I. Convergent Plate Boundaries (Destructive Margins) (Colliding Plates)
I. Convergent plate boundaries (destructive margins) (colliding plates) 1. Plates collide, an ocean trench forms, lithosphere is subducted into the mantle 2. Types of convergence—three general classes, created by two types of plates —denser oceanic plate subsides into mantle SUBDUCTION --oceanic trench present where this occurs -- Plate descends angle average 45o a. Oceanic-continental convergence 1. Denser oceanic slab sinks into the asthenosphere—continental plate floats 2. Pockets of magma develop and rise—due to water added to lower part of overriding crust—100-150 km depth 3. Continental volcanic arcs form a. e.g., Andes Low angle, strong coupling, strong earthquakes i. Nazca plate ii. Seaward migration of Peru-Chile trench b. e.g., Cascades c. e.g., Sierra Nevada system example of previous subduction b. Oceanic-oceanic convergence 1. Two oceanic slabs converge HDEW animation Motion at Plate Boundaries a. one descends beneath the other b. the older, colder one 2. Often forms volcanoes on the ocean floor 3. Volcanic island arcs forms as volcanoes emerge from the sea 200-300 km from subduction trench TimeLife page 117 Philippine Arc a. e.g., Aleutian islands b. e.g., Mariana islands c. e.g., Tonga islands all three are young volcanic arcs, 20 km thick crust Japan more complex and thicker crust 20-35 km thick c. Continental-continental convergence— all oceaninc crust is destroyed at convergence, and continental crust remains 1. continental crust does not subside—too buoyant 2. two continents collide—become ‘sutured’ together 3. Can produce new mountain ranges such as the Himalayas II. Transform fault boundaries 1. -
Plate Tectonics Says That Earth’S Plates Move Because of Convection Currents in the Mantle
Bellringer Which ocean is getting smaller and which ocean is getting bigger due to subduction and sea floor spreading? Plate Tectonic Theory Notes How Plates Move • Earth’s crust is broken into many jagged pieces. The surface is like the shell of a hard-boiled egg that has been rolled. The pieces of Earth’s crust are called plates. Plates carry continents, oceans floors, or both. How Plates Move • The theory of plate tectonics says that Earth’s plates move because of convection currents in the mantle. Currents in the mantle carry plates on Earth’s surface, like currents in water carry boats on a river, or Cheerios in milk. How Plates Move • Plates can meet in three different ways. Plates may pull apart, push together, or slide past each other. Wherever plates meet, you usually get volcanoes, mountain ranges, or ocean trenches. Plate Boundaries • A plate boundary is where two plates meet. Faults form along plate boundaries. A fault is a break in Earth’s crust where blocks of rock have slipped past each other. Plate Boundaries • Where two plates move apart, the boundary is called a divergent boundary. • A divergent boundary between two oceanic plates will result in a mid-ocean ridge AND rift valley. (SEE: Sea-Floor Spreading) • A divergent boundary between two continental plates will result in only a rift valley. This is currently happening at the Great Rift Valley in east Africa. Eventually, the Indian Ocean will pour into the lowered valley and a new ocean will form. Plate Boundaries • Where two plates push together, the boundary is called a convergent boundary. -

Sensitivity Analysis of Non-Linear Steep Waves Using VOF Method
Tenth International Conference on ICCFD10-268 Computational Fluid Dynamics (ICCFD10), Barcelona, Spain, July 9-13, 2018 Sensitivity Analysis of Non-linear Steep Waves using VOF Method A. Khaware*, V. Gupta*, K. Srikanth *, and P. Sharkey ** Corresponding author: [email protected] * ANSYS Software Pvt Ltd, Pune, India. ** ANSYS UK Ltd, Milton Park, UK Abstract: The analysis and prediction of non-linear waves is a crucial part of ocean hydrodynamics. Sea waves are typically non-linear in nature, and whilst models exist to predict their behavior, limits exist in their applicability. In practice, as the waves become increasingly steeper, they approach a point beyond which the wave integrity cannot be maintained, and they 'break'. Understanding the limits of available models as waves approach these break conditions can significantly help to improve the accuracy of their potential impact in the field. Moreover, inaccurate modeling of wave kinematics can result in erroneous hydrodynamic forces being predicted. This paper investigates the sensitivity of non-linear wave modeling from both an analytical and a numerical perspective. Using a Volume of Fluid (VOF) method, coupled with the Open Channel Flow module in ANSYS Fluent, sensitivity studies are performed for a variety of non-linear wave scenarios with high steepness and high relative height. These scenarios are intended to mimic the near-break conditions of the wave. 5th order solitary wave models are applied to shallow wave scenarios with high relative heights, and 5th order Stokes wave models are applied to short gravity waves with high wave steepness. Stokes waves are further applied in the shallow regime at high wave steepness to examine the wave sensitivity under extreme conditions. -

Downloaded 09/27/21 06:58 AM UTC 3328 JOURNAL of the ATMOSPHERIC SCIENCES VOLUME 76 Y 2
NOVEMBER 2019 S C H L U T O W 3327 Modulational Stability of Nonlinear Saturated Gravity Waves MARK SCHLUTOW Institut fur€ Mathematik, Freie Universitat€ Berlin, Berlin, Germany (Manuscript received 15 March 2019, in final form 13 July 2019) ABSTRACT Stationary gravity waves, such as mountain lee waves, are effectively described by Grimshaw’s dissipative modulation equations even in high altitudes where they become nonlinear due to their large amplitudes. In this theoretical study, a wave-Reynolds number is introduced to characterize general solutions to these modulation equations. This nondimensional number relates the vertical linear group velocity with wave- number, pressure scale height, and kinematic molecular/eddy viscosity. It is demonstrated by analytic and numerical methods that Lindzen-type waves in the saturation region, that is, where the wave-Reynolds number is of order unity, destabilize by transient perturbations. It is proposed that this mechanism may be a generator for secondary waves due to direct wave–mean-flow interaction. By assumption, the primary waves are exactly such that altitudinal amplitude growth and viscous damping are balanced and by that the am- plitude is maximized. Implications of these results on the relation between mean-flow acceleration and wave breaking heights are discussed. 1. Introduction dynamic instabilities that act on the small scale comparable to the wavelength. For instance, Klostermeyer (1991) Atmospheric gravity waves generated in the lee of showed that all inviscid nonlinear Boussinesq waves are mountains extend over scales across which the back- prone to parametric instabilities. The waves do not im- ground may change significantly. The wave field can mediately disappear by the small-scale instabilities, rather persist throughout the layers from the troposphere to the perturbations grow comparably slowly such that the the deep atmosphere, the mesosphere and beyond waves persist in their overall structure over several more (Fritts et al. -

Modelling of Ocean Waves with the Alber Equation: Application to Non-Parametric Spectra and Generalisation to Crossing Seas
fluids Article Modelling of Ocean Waves with the Alber Equation: Application to Non-Parametric Spectra and Generalisation to Crossing Seas Agissilaos G. Athanassoulis 1,* and Odin Gramstad 2 1 Department of Mathematics, University of Dundee, Dundee DD1 4HN, UK 2 Hydrodynamics, MetOcean & SRA, Energy Systems, DNV, 1363 Høvik, Norway; [email protected] * Correspondence: [email protected] Abstract: The Alber equation is a phase-averaged second-moment model used to study the statistics of a sea state, which has recently been attracting renewed attention. We extend it in two ways: firstly, we derive a generalized Alber system starting from a system of nonlinear Schrödinger equations, which contains the classical Alber equation as a special case but can also describe crossing seas, i.e., two wavesystems with different wavenumbers crossing. (These can be two completely independent wavenumbers, i.e., in general different directions and different moduli.) We also derive the associated two-dimensional scalar instability condition. This is the first time that a modulation instability condition applicable to crossing seas has been systematically derived for general spectra. Secondly, we use the classical Alber equation and its associated instability condition to quantify how close a given nonparametric spectrum is to being modulationally unstable. We apply this to a dataset of 100 nonparametric spectra provided by the Norwegian Meteorological Institute and find that the Citation: Athanassoulis, A.G.; vast majority of realistic spectra turn out to be stable, but three extreme sea states are found to be Gramstad, O. Modelling of Ocean Waves with the Alber Equation: unstable (out of 20 sea states chosen for their severity). -

Waves and Structures
WAVES AND STRUCTURES By Dr M C Deo Professor of Civil Engineering Indian Institute of Technology Bombay Powai, Mumbai 400 076 Contact: [email protected]; (+91) 22 2572 2377 (Please refer as follows, if you use any part of this book: Deo M C (2013): Waves and Structures, http://www.civil.iitb.ac.in/~mcdeo/waves.html) (Suggestions to improve/modify contents are welcome) 1 Content Chapter 1: Introduction 4 Chapter 2: Wave Theories 18 Chapter 3: Random Waves 47 Chapter 4: Wave Propagation 80 Chapter 5: Numerical Modeling of Waves 110 Chapter 6: Design Water Depth 115 Chapter 7: Wave Forces on Shore-Based Structures 132 Chapter 8: Wave Force On Small Diameter Members 150 Chapter 9: Maximum Wave Force on the Entire Structure 173 Chapter 10: Wave Forces on Large Diameter Members 187 Chapter 11: Spectral and Statistical Analysis of Wave Forces 209 Chapter 12: Wave Run Up 221 Chapter 13: Pipeline Hydrodynamics 234 Chapter 14: Statics of Floating Bodies 241 Chapter 15: Vibrations 268 Chapter 16: Motions of Freely Floating Bodies 283 Chapter 17: Motion Response of Compliant Structures 315 2 Notations 338 References 342 3 CHAPTER 1 INTRODUCTION 1.1 Introduction The knowledge of magnitude and behavior of ocean waves at site is an essential prerequisite for almost all activities in the ocean including planning, design, construction and operation related to harbor, coastal and structures. The waves of major concern to a harbor engineer are generated by the action of wind. The wind creates a disturbance in the sea which is restored to its calm equilibrium position by the action of gravity and hence resulting waves are called wind generated gravity waves. -

Santa Monica Mountains National Recreation Area Geologic Resources Inventory Report
National Park Service U.S. Department of the Interior Natural Resource Stewardship and Science Santa Monica Mountains National Recreation Area Geologic Resources Inventory Report Natural Resource Report NPS/NRSS/GRD/NRR—2016/1297 ON THE COVER: Photograph of Boney Mountain (and the Milky Way). The Santa Monica Mountains are part of the Transverse Ranges. The backbone of the range skirts the northern edges of the Los Angeles Basin and Santa Monica Bay before descending into the Pacific Ocean at Point Mugu. The ridgeline of Boney Mountain is composed on Conejo Volcanics, which erupted as part of a shield volcano about 15 million years ago. National Park Service photograph available at http://www.nps.gov/samo/learn/photosmultimedia/index.htm. THIS PAGE: Photograph of Point Dume. Santa Monica Mountains National Recreation Area comprises a vast and varied California landscape in and around the greater Los Angeles metropolitan area and includes 64 km (40 mi) of ocean shoreline. The mild climate allows visitors to enjoy the park’s scenic, natural, and cultural resources year-round. National Park Service photograph available at https://www.flickr.com/photos/ santamonicamtns/albums. Santa Monica Mountains National Recreation Area Geologic Resources Inventory Report Natural Resource Report NPS/NRSS/GRD/NRR—2016/1297 Katie KellerLynn Colorado State University Research Associate National Park Service Geologic Resources Division Geologic Resources Inventory PO Box 25287 Denver, CO 80225 September 2016 U.S. Department of the Interior National Park Service Natural Resource Stewardship and Science Fort Collins, Colorado The National Park Service, Natural Resource Stewardship and Science office in Fort Collins, Colorado, publishes a range of reports that address natural resource topics. -

Active Continental Margin
Encyclopedia of Marine Geosciences DOI 10.1007/978-94-007-6644-0_102-2 # Springer Science+Business Media Dordrecht 2014 Active Continental Margin Serge Lallemand* Géosciences Montpellier, University of Montpellier, Montpellier, France Synonyms Convergent boundary; Convergent margin; Destructive margin; Ocean-continent subduction; Oceanic subduction zone; Subduction zone Definition An active continental margin refers to the submerged edge of a continent overriding an oceanic lithosphere at a convergent plate boundary by opposition with a passive continental margin which is the remaining scar at the edge of a continent following continental break-up. The term “active” stresses the importance of the tectonic activity (seismicity, volcanism, mountain building) associated with plate convergence along that boundary. Today, people typically refer to a “subduction zone” rather than an “active margin.” Generalities Active continental margins, i.e., when an oceanic plate subducts beneath a continent, represent about two-thirds of the modern convergent margins. Their cumulated length has been estimated to 45,000 km (Lallemand et al., 2005). Most of them are located in the circum-Pacific (Japan, Kurils, Aleutians, and North, Middle, and South America), Southeast Asia (Ryukyus, Philippines, New Guinea), Indian Ocean (Java, Sumatra, Andaman, Makran), Mediterranean region (Aegea, Cala- bria), or Antilles. They are generally “active” over tens (Tonga, Mariana) or hundreds (Japan, South America) of millions of years. This longevity has consequences on their internal structure, especially in terms of continental growth by tectonic accretion of oceanic terranes, or by arc magmatism, but also sometimes in terms of continental consumption by tectonic erosion. Morphology A continental margin generally extends from the coast down to the abyssal plain (see Fig. -

Copyright © by SIAM. Unauthorized Reproduction of This Article Is Prohibited. 82 PHILIPPE GUYENNE and DAVID P
SIAM J. SCI. COMPUT. c 2007 Society for Industrial and Applied Mathematics Vol. 30, No. 1, pp. 81–101 A HIGH-ORDER SPECTRAL METHOD FOR NONLINEAR WATER WAVES OVER MOVING BOTTOM TOPOGRAPHY∗ † ‡ PHILIPPE GUYENNE AND DAVID P. NICHOLLS Abstract. We present a numerical method for simulations of nonlinear surface water waves over variable bathymetry. It is applicable to either two- or three-dimensional flows, as well as to either static or moving bottom topography. The method is based on the reduction of the problem to a lower-dimensional Hamiltonian system involving boundary quantities alone. A key component of this formulation is the Dirichlet–Neumann operator which, in light of its joint analyticity properties with respect to surface and bottom deformations, is computed using its Taylor series representation. We present new, stabilized forms for the Taylor terms, each of which is efficiently computed by a pseu- dospectral method using the fast Fourier transform. Physically relevant applications are displayed to illustrate the performance of the method; comparisons with analytical solutions and laboratory experiments are provided. Key words. gravity water waves, bathymetry, pseudospectral methods, Dirichlet–Neumann operators, boundary perturbations AMS subject classifications. 76B15, 76B07, 65M70, 35S30 DOI. 10.1137/060666214 1. Introduction. Accurate modeling of surface water wave dynamics over bot- tom topography is of great importance to coastal engineers and has drawn considerable attention in recent years. Here are just a few applications: linear [16, 33] and nonlinear wave shoaling [25, 24, 28, 27], Bragg reflection [35, 15, 36, 14, 30, 33, 4], harmonic wave generation [3, 17, 18], and tsunami generation [37, 22]. -

Modulational Instability in Linearly Coupled Asymmetric Dual-Core Fibers
applied sciences Article Modulational Instability in Linearly Coupled Asymmetric Dual-Core Fibers Arjunan Govindarajan 1,†, Boris A. Malomed 2,3,*, Arumugam Mahalingam 4 and Ambikapathy Uthayakumar 1,* 1 Department of Physics, Presidency College, Chennai 600 005, Tamilnadu, India; [email protected] 2 Department of Physical Electronics, School of Electrical Engineering, Faculty of Engineering, Tel Aviv University, Tel Aviv 69978, Israel 3 Laboratory of Nonlinear-Optical Informatics, ITMO University, St. Petersburg 197101, Russia 4 Department of Physics, Anna University, Chennai 600 025, Tamilnadu, India; [email protected] * Correspondence: [email protected] (B.A.M.); [email protected] (A.U.) † Current address: Centre for Nonlinear Dynamics, School of Physics, Bharathidasan University, Tiruchirappalli 620 024, Tamilnadu, India. Academic Editor: Christophe Finot Received: 25 April 2017; Accepted: 13 June 2017; Published: 22 June 2017 Abstract: We investigate modulational instability (MI) in asymmetric dual-core nonlinear directional couplers incorporating the effects of the differences in effective mode areas and group velocity dispersions, as well as phase- and group-velocity mismatches. Using coupled-mode equations for this system, we identify MI conditions from the linearization with respect to small perturbations. First, we compare the MI spectra of the asymmetric system and its symmetric counterpart in the case of the anomalous group-velocity dispersion (GVD). In particular, it is demonstrated that the increase of the inter-core linear-coupling coefficient leads to a reduction of the MI gain spectrum in the asymmetric coupler. The analysis is extended for the asymmetric system in the normal-GVD regime, where the coupling induces and controls the MI, as well as for the system with opposite GVD signs in the two cores. -

Plate Tectonics Passport
What is plate tectonics? The Earth is made up of four layers: inner core, outer core, mantle and crust (the outermost layer where we are!). The Earth’s crust is made up of oceanic crust and continental crust. The crust and uppermost part of the mantle are broken up into pieces called plates, which slowly move around on top of the rest of the mantle. The meeting points between the plates are called plate boundaries and there are three main types: Divergent boundaries (constructive) are where plates are moving away from each other. New crust is created between the two plates. Convergent boundaries (destructive) are where plates are moving towards each other. Old crust is either dragged down into the mantle at a subduction zone or pushed upwards to form mountain ranges. Transform boundaries (conservative) are where are plates are moving past each other. Can you find an example of each type of tectonic plate boundary on the map? Divergent boundary: Convergent boundary: Transform boundary: What do you notice about the location of most of the Earth’s volcanoes? P.1 Iceland Iceland lies on the Mid Atlantic Ridge, a divergent plate boundary where the North American Plate and the Eurasian Plate are moving away from each other. As the plates pull apart, molten rock or magma rises up and erupts as lava creating new ocean crust. Volcanic activity formed the island about 16 million years ago and volcanoes continue to form, erupt and shape Iceland’s landscape today. The island is covered with more than 100 volcanoes - some are extinct, but about 30 are currently active.