AI MAGAZINE AAAI News
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Stanley: the Robot That Won the DARPA Grand Challenge
STANLEY Winning the DARPA Grand Challenge with an AI Robot_ Michael Montemerlo, Sebastian Thrun, Hendrik Dahlkamp, David Stavens Stanford AI Lab, Stanford University 353 Serra Mall Stanford, CA 94305-9010 fmmde,thrun,dahlkamp,[email protected] Sven Strohband Volkswagen of America, Inc. Electronics Research Laboratory 4009 Miranda Avenue, Suite 150 Palo Alto, California 94304 [email protected] http://www.cs.stanford.edu/people/dstavens/aaai06/montemerlo_etal_aaai06.pdf Stanley: The Robot that Won the DARPA Grand Challenge Sebastian Thrun, Mike Montemerlo, Hendrik Dahlkamp, David Stavens, Andrei Aron, James Diebel, Philip Fong, John Gale, Morgan Halpenny, Gabriel Hoffmann, Kenny Lau, Celia Oakley, Mark Palatucci, Vaughan Pratt, and Pascal Stang Stanford Artificial Intelligence Laboratory Stanford University Stanford, California 94305 http://robots.stanford.edu/papers/thrun.stanley05.pdf DARPA Grand Challenge: Final Part 1 Stanley from Stanford 10.54 https://www.youtube.com/watch?v=M2AcMnfzpNg Sebastian Thrun helped build Google's amazing driverless car, powered by a very personal quest to save lives and reduce traffic accidents. 4 minutes https://www.ted.com/talks/sebastian_thrun_google_s_driverless_car THE GREAT ROBOT RACE – documentary Published on Jan 21, 2016 DARPA Grand Challenge—a raucous race for robotic, driverless vehicles sponsored by the Pentagon, which awards a $2 million purse to the winning team. Armed with artificial intelligence, laser-guided vision, GPS navigation, and 3-D mapping systems, the contenders are some of the world's most advanced robots. Yet even their formidable technology and mechanical prowess may not be enough to overcome the grueling 130-mile course through Nevada's desert terrain. From concept to construction to the final competition, "The Great Robot Race" delivers the absorbing inside story of clever engineers and their unyielding drive to create a champion, capturing the only aerial footage that exists of the Grand Challenge. -

Mapping Planetary Caves with an Autonomous, Heterogeneous Robot Team
Mapping Planetary Caves with an Autonomous, Heterogeneous Robot Team Ammar Husain Heather Jones Balajee Kannan Robotics Institute Robotics Institute GE Global Research Carnegie Mellon University Carnegie Mellon University Schenectady, NY 12309 Pittsburgh, PA 15213 Pittsburgh, PA 15213 [email protected] [email protected] [email protected] Uland Wong Tiago Pimentel Martins da Silva Sarah Tang Robotics Institute Mechatronics Engineering Dept. Mechanical and Aerospace Eng. Dept. Carnegie Mellon University University of Brasilia Princeton University Pittsburgh, PA 15213 Brasilia, DF, Brazil Princeton, NJ 08544 [email protected] [email protected] [email protected] Shreyansh Daftry Steven Huber William L. “Red” Whittaker Electronics and Communication Dept. Astrobotic Technology, Inc. Robotics Institute Manipal Institute of Technology Pittsburgh, PA 15213 Carnegie Mellon University Manipal, Karnataka, India [email protected] Pittsburgh, PA 15213 [email protected] [email protected] Abstract— d Caves on other planetary bodies offer sheltered habitat for future human explorers and numerous clues to a planet’s past for scientists. While recent orbital imagery pro- vides exciting new details about cave entrances on the Moon and Mars, the interiors of these caves are still unknown and not observable from orbit. Multi-robot teams offer unique solutions for exploration and modeling subsurface voids during precursor missions. Robot teams that are diverse in terms of size, mobility, sensing, and capability can provide great advantages, but this diversity, coupled with inherently distinct low-level behavior (a) Lunar skylight (b) Skylight in a funnel- architectures, makes coordination a challenge. This paper shaped pit on Mars presents a framework that consists of an autonomous frontier and capability-based task generator, a distributed market-based Figure 1. -
A Century Long Commitment to Assessing Artificial Intelligence and Its Impact on Society1 Barbara J
A Century Long Commitment to Assessing Artificial Intelligence and Its Impact on Society1 Barbara J. Grosz, Harvard University, Inaugural Chair of the AI100 Standing Committee Peter Stone, University of Texas at Austin, Chair of the Inaugural AI100 Study Panel The Stanford One Hundred Year Study on Artificial Intelligence, a project that launched in December 2014, is designed to be a century-long periodic assessment of the field of Artificial Intelligence (AI) and its influences on people, their communities, and society. Colloquially referred to as "AI100", the project issued its first report in September 2016. A Standing Committee works with the Stanford Faculty Director of AI100 in overseeing the project and designing its activities. A little more than two years after the first report appeared, we reflect on the decisions made in shaping it, the process that produced it, its major conclusions, and reactions subsequent to its release. The inaugural AI100 report [4], which is titled “Artificial Intelligence and Life in 2030,” examines eight domains of human activity in which AI technologies are already starting to affect urban life. In scope, it encompasses domains with emerging products enabled by AI methods and ones raising concerns about technological impact generated by potential AI-enabled systems. The Study Panel members who authored the report and the AI100 Standing Committee, which is the body that directs the AI100 project, intend for it to act as a catalyst, spurring conversations on how we as a society might shape and share the potentially powerful technologies that AI could enable. In addition to influencing researchers and guiding decisions in industry and governments, the report aims to provide the general public with a scientifically and technologically accurate portrayal of the current state of AI and its potential. -

“Reflections on the Status and Future of Artificial Intelligence”
STATEMENT OF: ERIC HORVITZ TECHNICAL FELLOW AND DIRECTOR MICROSOFT RESEARCH—REDMOND LAB MICROSOFT CORPORATION BEFORE THE COMMITTEE ON COMMERCE SUBCOMMITTEE ON SPACE, SCIENCE, AND COMPETITIVENESS UNITED STATES SENATE HEARING ON THE DAWN OF ARTIFICIAL INTELLIGENCE NOVEMBER 30, 2016 “Reflections on the Status and Future of Artificial Intelligence” NOVEMBER 30, 2016 1 Chairman Cruz, Ranking Member Peters, and Members of the Subcommittee, my name is Eric Horvitz, and I am a Technical Fellow and Director of Microsoft’s Research Lab in Redmond, Washington. While I am also serving as Co-Chair of a new organization, the Partnership on Artificial Intelligence, I am speaking today in my role at Microsoft. We appreciate being asked to testify about AI and are committed to working collaboratively with you and other policymakers so that the potential of AI to benefit our country, and to people and society more broadly can be fully realized. With my testimony, I will first offer a historical perspective of AI, a definition of AI and discuss the inflection point the discipline is currently facing. Second, I will highlight key opportunities using examples in the healthcare and transportation industries. Third, I will identify the important research direction many are taking with AI. Next, I will attempt to identify some of the challenges related to AI and offer my thoughts on how best to address them. Finally, I will offer several recommendations. What is Artificial Intelligence? Artificial intelligence (AI) refers to a set of computer science disciplines aimed at the scientific understanding of the mechanisms underlying thought and intelligent behavior and the embodiment of these principles in machines that can deliver value to people and society. -
Curriculum Vitae
6/14/21 CURRICULUM VITAE Edward Hance Shortliffe, MD, PhD, MACP, FACMI, FIAHSI [work] Chair Emeritus and Adjunct Professor, Department of Biomedical Informatics Vagelos College of Physicians and Surgeons, Columbia University in the City of New York [email protected] – https://www.dbmi.columbia.edu/people/edward-shortliffe/ Adjunct Professor of Biomedical Informatics College of Health Solutions Arizona State University, Phoenix, AZ [email protected] – https://isearch.asu.edu/profile/1098580 Adjunct Professor, Department of Healthcare Policy and Research (Health Informatics) Weill Cornell Medical College, New York, NY http://hpr.weill.cornell.edu/divisions/health_informatics/ [home] 272 W 107th St #5B, New York, NY 10025-7833 Phone: 212-666-8440 — Mobile: 917-640-0933 [email protected] – http://www.shortliffe.net Born: Edmonton, Alberta, Canada Date of birth: 28 August 1947 Citizenship: U.S.A. (naturalized - 1962) Spouse: Vimla L. Patel, PhD Education From To School/Institution Major Subject, Degree, and Date 9/62 6/65 The Loomis School, Windsor, CT. High School 9/65 7/66 Gresham's School, Holt, Norfolk, U.K. Foreign Exchange Student 9/66 6/70 Harvard College, Cambridge, MA. Applied Math and Computer Science, A.B., June 1970 9/70 1/75 Stanford University, Stanford, CA PhD, Medical Information Sciences, January 1975 9/70 6/76 Stanford University School of Medicine MD, June 1976. 7/76 6/77 Massachusetts General Hospital, Boston, MA Internship in Internal Medicine 7/77 6/79 Stanford University Hospital, Stanford, CA Residency in Internal Medicine Honors Graduation Magna Cum Laude, Harvard College, June 1970 Medical Scientist Training Program (MSTP), NIH-funded Stanford Traineeship, September 1971 - June 1976 Grace Murray Hopper Award (Distinguished computer scientist under age 30), Association for Computing Machinery, October 1976 Research Career Development Award, National Library of Medicine, July 1979—June 1984 Henry J. -

Organization of the American Association for Artificial Intelligence
Organization of the American Association for Artificial Intelligence Officers President Tom M. Mitchell, Carnegie Mellon University President–Elect Ron Brachman, Corporation for National Research Initiatives Past President Bruce Buchanan, University of Pittsburgh Secretary–Treasurer Ted Senator Councilors (through 2003) Craig Boutilier, University of Toronto Rina Dechter, University of California, Irvine Richard Doyle, Jet Propulsion Laboratory, California Institute of Technology David Poole, University of British Columbia (through 2004) Marie desJardins, University of Maryland Baltimore County Craig Knoblock, University of Southern California / Institute for Scientific Information (USC/ISI) Daphne Koller, Stanford University Peter Norvig, Google, Inc. (through 2005) Carla Gomes, Cornell University Michael Littman, Rutgers University Maja Mataric, University of Southern California Yoav Shoham, Stanford University Standing Committees Conference Chair James A. Hendler, University of Maryland ix Fellows and Nominating Chair Bruce G. Buchanan, University of Pittsburgh Finance Chair Ted Senator Grants Chair Manuela Veloso, Carnegie Mellon University Membership Chair Reid Simmons, Carnegie Mellon University Publications Chair David Leake, Indiana University Symposium Chair Holly Yanco, University of Massachusetts Lowell Symposium Associate Chair Marie desJardins, University of Maryland Baltimore County AI Magazine Editor David Leake, Indiana University Reports Editor Robert A. Morris, NASA Ames Research Center Book Review Editor Michael Wellman, -
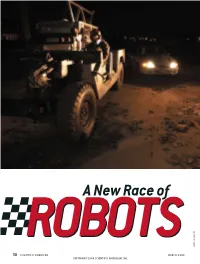
A New Race of ROBOTS
A New Race of ROBOTSROBOTS SCOTT GOLDSMITH 58 SCIENTIFIC AMERICAN MARCH 2004 COPYRIGHT 2004 SCIENTIFIC AMERICAN, INC. DECEMBER 2, 2003: The Red Team prepares its robotic vehicle, Sandstorm, for its maiden voyage. As Nick Miller, one of several dozen Carnegie Mellon University undergraduates on the team, drives the robot around a test loop between abandoned steel mills in Pittsburgh, onboard computers (in metal box) record the test path. Five days later the robot drives the loop with no one at the wheel. Around the U.S., engineers are finishing one-year crash projects to create robots able to dash 200 miles through the Mojave Desert in a day, unaided by humans. Scientific American tailed the odds-on favorite team for 10 months and found that major innovations in robotics are not enough to win such a contest. Obsession is also required BY W. WAYT GIBBS PITTSBURGH, DECEMBER 10, 2003: A cold rain blows sideways through the night into the face of Chris Urmson as he frets over Sandstorm, the robotic vehicle idling next to him on an overgrown lot between two empty steel mills. Urmson checks a tarp protecting the metal cage full of computers and custom electronics that serves as the sensate head of the chimeric robot, which has the body of an old Marine Corps Humvee. His ungloved hands shivering and his body aching from three sleep-deprived days and nights of work in the field, Urmson stares glumly at the machine and weighs his options. None of them are good. www.sciam.com SCIENTIFIC AMERICAN 59 COPYRIGHT 2004 SCIENTIFIC AMERICAN, INC. -

Introduction
Introduction IJCAI-01 Conference Committee IJCAI-01 Program Committee: Contents: CONFERENCE CHAIR: Elisabeth André, DFKI GmbH (Germany) Introduction 2 Hector J. Levesque, University of Toronto (Canada) Minoru Asada, Osaka University (Japan) Sponsors & Committees 2-3 Franz Baader, RWTH Aachen (Germany) PROGRAM CHAIR: IJCAI-01 Awards 4 Craig Boutilier, University of Toronto (Canada) Bernhard Nebel,Albert-Ludwigs-Universität, Freiburg Didier Dubois, IRIT-CNRS (France) Conference at a Glance 5 (Germany) Maria Fox, University of Durham (United Kingdom) Workshop Program 6-7 LOCAL ARRANGEMENTS CHAIR: Hector Geffner, Universidad Simón Bolívar Doctoral Consortium 8 James Hoard, The Boeing Company, Seattle (USA) (Venezuela) Tutorial Program 8 SECRETARY-TREASURER: Georg Gottlob,Vienna University of Technology (Austria) Conference Program Highlights 9 Ronald J. Brachman,AT&T Labs – Research (USA) Invited Speakers 10 Haym Hirsh, Rutgers University (USA) IAAI-01 Conference 11 Eduard Hovy, Information Sciences Institute (USA) Advisory Committee: Joxan Jaffar, National University of Singapore Technical Program 12-19 Bruce Buchanan, University of Pittsburgh (USA) (Singapore) Exhibit Program 20-23 Silvia Coradeschi, Örebro University (Sweden) Daphne Koller, Stanford University (USA) RoboCup 2001 24 Olivier Faugeras, INRIA (France) Fangzhen Lin, Hong Kong University of Science and Registration Information 25 Cheng Hu, Chinese Academy of Sciences (China) Technolog y (Hong Kong) General Information 25-27 Nicholas Jennings, University of London (England) Heikki Mannila, Nokia Research Center (Finland) Conference Maps 28-30 Henry Kautz, University of Washington (USA) Robert Milne, Intelligent Applications (United Kingdom) IJCAI-03 Conference 31 Robert Mercer, University of Western Ontario (Canada) Daniele Nardi, Università di Roma “La Sapienza” Special Meetings 31 Silvia Miksch,Vienna University of Technology (Italy) (Austria) Dana Nau, University of Maryland (USA) Devika Subramanian, Rice University (USA) Patrick Prosser, University of Glasgow (UK) Welcome to IJCAI-01 L. -

Machine Learning, Reasoning, and Intelligence in Daily Life: Directions and Challenges
Machine Learning, Reasoning, and Intelligence in Daily Life: Directions and Challenges Eric Horvitz Microsoft Research Redmond, Washington USA 98052 [email protected] Abstract An example of an implicit integration of ambient learning Technical developments and trends are providing a and reasoning is the effort by our team to create a probabil- fertile substrate for creating and integrating ma- istic action prediction and prefetching subsystem that is em- chine learning and reasoning into multiple applica- bedded deeply in the kernel of Microsoft’s Windows Vista tions and services. I will review several illustrative operating system. The predictive component, operating research efforts on our team, and focus on chal- within a component in the Vista operating system called lenges, opportunities, and directions with the Superfetch, learns by watching sequences of application streaming of machine intelligence into daily life. launches over time to predict a computer user’s application launches. These predictions, coupled with a utility model 1 Reflections on Trends and Directions that captures preferences about the cost of waiting, are used Over the last decade, technical and infrastructural develop- in an ongoing optimization to prefetch unlaunched applica- ments have come together to create a nurturing environment tions into memory ahead of their manual launching. The for developing and fielding applications of machine learning implicit service seeks to minimize the average wait for ap- and reasoning—and for harnessing automated intelligence -

The Dawn of Artificial Intelligence Hearing
S. HRG. 114–562 THE DAWN OF ARTIFICIAL INTELLIGENCE HEARING BEFORE THE SUBCOMMITTEE ON SPACE, SCIENCE, AND COMPETITIVENESS OF THE COMMITTEE ON COMMERCE, SCIENCE, AND TRANSPORTATION UNITED STATES SENATE ONE HUNDRED FOURTEENTH CONGRESS SECOND SESSION NOVEMBER 30, 2016 Printed for the use of the Committee on Commerce, Science, and Transportation ( U.S. GOVERNMENT PUBLISHING OFFICE 24–175 PDF WASHINGTON : 2017 For sale by the Superintendent of Documents, U.S. Government Publishing Office Internet: bookstore.gpo.gov Phone: toll free (866) 512–1800; DC area (202) 512–1800 Fax: (202) 512–2104 Mail: Stop IDCC, Washington, DC 20402–0001 VerDate Nov 24 2008 13:07 Feb 15, 2017 Jkt 075679 PO 00000 Frm 00001 Fmt 5011 Sfmt 5011 S:\GPO\DOCS\24175.TXT JACKIE SENATE COMMITTEE ON COMMERCE, SCIENCE, AND TRANSPORTATION ONE HUNDRED FOURTEENTH CONGRESS SECOND SESSION JOHN THUNE, South Dakota, Chairman ROGER F. WICKER, Mississippi BILL NELSON, Florida, Ranking ROY BLUNT, Missouri MARIA CANTWELL, Washington MARCO RUBIO, Florida CLAIRE MCCASKILL, Missouri KELLY AYOTTE, New Hampshire AMY KLOBUCHAR, Minnesota TED CRUZ, Texas RICHARD BLUMENTHAL, Connecticut DEB FISCHER, Nebraska BRIAN SCHATZ, Hawaii JERRY MORAN, Kansas EDWARD MARKEY, Massachusetts DAN SULLIVAN, Alaska CORY BOOKER, New Jersey RON JOHNSON, Wisconsin TOM UDALL, New Mexico DEAN HELLER, Nevada JOE MANCHIN III, West Virginia CORY GARDNER, Colorado GARY PETERS, Michigan STEVE DAINES, Montana NICK ROSSI, Staff Director ADRIAN ARNAKIS, Deputy Staff Director JASON VAN BEEK, General Counsel KIM LIPSKY, Democratic -
A 20-Year Community Roadmap for Artificial Intelligence Research in the US
A 20-Year Community Roadmap for Begin forwarded message: From: AAAI Press <[email protected]> Subject: Recap Date: July 8, 2019 at 3:52:40 PM PDT To: Carol McKenna Hamilton <[email protected]>Artificial Intelligence Research in the US Could you check this for me? Hi Denise, While it is fresh in my mind, I wanted to provide you with a recap on the AAAI proceedings work done. Some sections of the proceedings were better than others, which is to be expected because authors in some subject areas are less likely to use gures, the use of which is a signicant factor in error rate. The vision section was an excellent example of this variability. The number of problems in this section was quite high. Although I only called out 13 papers for additional corrections, there were many problems that I simply let go. What continues to be an issue, is why the team didn’t catch many of these errors before compilation began. For example, some of the errors involved the use of the caption package, as well as the existence of setlength commands. These are errors that should have been discovered and corrected before compilation. As I’ve mentioned before, running search routines on the source of all the papers in a given section saves a great deal of time because, in part, it insures consistency. That is something that has been decidedly lacking with regard to how these papers have been (or haven’t been) corrected. It is a cause for concern because the error rate should have been improving, not getting worse. -

Reid Simmons
Pittsburgh PA 1:01:53 m4v Reid Simmons An interview conducted by Peter Asaro with Selma Šabanović November 23 2010 Q: We’ll just start by asking where you were born and where you grew up? Reid Simmons: Okay. I was born in Akron, Ohio, lived there for two years and then moved to Buffalo, New York, where I spent most of my formative years. I was an undergraduate at University of Buffalo, so hometown and then went on to spent a year working for a company in Ann Arbor doing computer design, graphics, and then moved to MIT to do my graduate work in artificial intelligence. Q: And when did you first encounter robotics? Reid Simmons: When I first encountered robotics, so Rod Brooks was at MIT at the time and he was very active doing robotics, so a number of his grad students were contemporaries of mine and I saw what they were doing and they had robots running around the lab, but I was kind of a good old-fashioned AI guy and didn’t actually do anything in robotics during my graduate work. When I graduated, I was intended to go into industrial research and that’s where I spent most of my time looking for jobs and then towards the very end of my job search, I get a call out of the blue from Tom Mitchell who along with Red Whittaker and Takeo Kanade had landed a fairly large NASA contract to build a prototype Mars rover and Red was going to do the mechanism and control and Takeo was going to be doing the perception and Tom was going to be doing the AI.