Views of the Authors, Who Are Responsible for the Facts and the Accuracy of the Information Presented Herein
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
TEM Vol 3 Part 2.17A
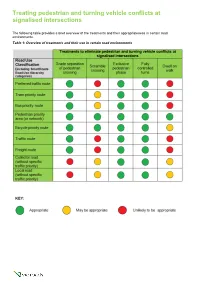
Treating pedestrian and turning vehicle conflicts at signalised intersections The following table provides a brief overview of the treatments and their appropriateness in certain road environments. Table 1: Overview of treatments and their use in certain road environments Table 2: Overview of treatments and their use in certain road environments Treatments to eliminate pedestrian and turning vehicle conflicts at signalised intersections Grade separation of pedestrian crossing Pedestrian overpass Maroondah Highway, Ringwood Brief description Full grade separation of pedestrians, above or below an intersection, eliminates the conflict between motorists and pedestrians at a signalised intersection. A pedestrian overpass or underpass allows pedestrians to cross the road independently of the traffic signals. Potential • At intersections within pedestrian priority areas as defined in the VicRoads SmartRoads locations strategy. • Within central activities areas (including hospital and university campuses) where pedestrian volumes are significant in all directions of the intersection. • Where an at-grade crossing is not desirable or where it is preferred that pedestrians be able to cross the intersection at any time. • Where the intersection is located between public transport nodes (e.g. a connection between a railway station and a bus interchange). • Where pedestrian paths or desire lines already take them over or under the road (e.g., at an elevated railway station). Considerations • The geometry of the overpass / underpass will appropriately cater for the expected volume of pedestrians (and cyclists). • The impact on travel times for users of the grade separated facility - they will not be favourable where the walking distance is more than 50 percent greater than the at-grade distance. -

100450 Hook Turn Brochure 2.FH11
Stay Safe HOOK Tips that will help Make eye contact with other drivers. Regularly check behind you. Check your bike regularly brakes, tyres, chain, reflectors TURNS and lights. Wear an approved helmet. Make sure it fits firmly and keep it done up. If your helmet gets dented or broken in The safest way for a crash or dropped heavily, replace it. Work on your bike skills. Practise the skills away from cyclists to turn right other traffic. Make sure you can be seen bright-coloured clothes, at busy intersections lights and reflectors all help. Ride at least one metre out from parked cars, and watch For more cycling information go to for drivers opening doors. www.hamilton.co.nz/thinkchangego Occupy the centre of the traffic lane when the road width requires it, or when you need to position yourself for a turn. Scan ahead for potential hazards like potholes, drain gratings, pedestrians or drivers who have not seen you. Know the road rules and follow them. Be predictable. Ride in as smooth a line as possible. Where possible, choose a safe route. It enables cyclists to make their right turn whilst keeping BOUNDARY RD, right THE DANGER left at all times. Because cyclists keep left during a HOOK TURN, it reduces conflict between cyclists and motorists. into VICTORIA ST Turning right at busy intersections can be tricky for cyclists. HOW TO DO A HOOK TURN To begin with, the normal right turning manoeuvre means A HOOK TURN allows cyclists to turn right at an cyclists have to cross two lanes of busy traffic to reach intersection in two stages, during two green light phases. -
Traffic Signal Design Section 10 - Signs
Traffic signal design Section 10 - Signs The traffic signal design guidelines have been developed to assist in designing traffic control signals. The guidelines are to comprise 16 sections and 5 appendices. These are initially being released individually and in no specific order. The sections which are to be released are as follows: Part Title Section 1 Investigation Section 2 Warrants Section 3 Design Process Section 4 Plan Requirements Section 5 Geometry Section 6 Pavement Marking Section 7 Phasing and Signal Group Display Sequence Section 8 Lanterns Section 9 Posts Section 10 Signs Section 11 Detectors Section 12 Controller Section 13 Provision for Future Facilities Section 14 Signalised Mid-block Marked Footcrossings Section 15 Special Situations Section 16 References Appendix A Design Plan Checklist Appendix B Traffic Signal Symbols Appendix C Location and Function of Lanterns Appendix D Location and Dimensions of Components Appendix E Left Turn on Red Appendix F Level Crossing Interface – Concept of Operations Appendix G Level Crossing Interface – Traffic Signal Design Guidance To determine which sections are currently available go to: www.rta.nsw.gov.au/doingbusinesswithus/downloads/technicalmanuals/trafficsignaldesign_dl1.html The information contained in the various parts is intended to be used as a guide to good practice. Discretion and judgement should be exercised in the light of the many factors that may influence the design of traffic signals at any particular site. The guidelines make reference, where relevant, to current Australian Standards and are intended to supplement and otherwise assist in their interpretation and application. Traffic Signal Design Section 10 SIGNS Special Note: As of 17 January 2011, the RTA is adopting the Austroads Guides (Guide to Traffic Management) and Australian Standards (AS 1742, 1743 & 2890) as its primary technical references. -
BICYCLE STORAGE AREAS and ADVANCED BICYCLE STOP LINES
Technical direction For traffic and transport practitioners POLICY – GUIDELINES - ADVICE PUBLISHED JULY 2009 TDT 2009/ Supersedes NIL 06 BICYCLE STORAGE AREAS and ADVANCED BICYCLE STOP LINES INTRODUCTION On 1 July 2008, new road rules came into force in NSW. The Road Rules 2008 included rules for Bicycle Storage Areas and Bicycle Hook Turn Storage Areas at signalised intersections. Advanced Bicycle Stop Lines were already covered by the road rules, though this term is not, given that they are simply another type of stop line. There are many different terminologies used when referring to bicycle storage areas and their associated components and/or variations. The terms commonly used are head start storage areas, bicycle reservoirs, bicycle storage areas, bicycle storage boxes or bike boxes. In NSW we will use the terms Expanded Bicycle Storage Areas, Bicycle Hook Turn Storage Areas and Advanced Bicycle Stop Lines. The general terms, bicycle storage area, when used in this Technical Direction, refers to both Expanded Bicycle Storage Areas and Bicycle Hook Turn Storage Areas. This technical direction covers the use of Expanded Bicycle Storage Areas, Bicycle Hook Turn Storage Areas and Advanced Bicycle Stop Lines at signalised intersection within NSW. In general, bicycle storage areas are best suited for use on roads with high bicycle numbers and lower traffic volumes (e.g. local roads and some regional roads) while Advanced Bicycle Stop Lines are more suited to roads with both high numbers of bicycles and vehicles (e.g. major roads). For: Director, Major Infrastructure; Director, Regional Operations & Engineering Services; Director, Business Coordination, Road Safety & Policy; Traffic Management, Road Safety and Road Design personnel; Councils For further enquiries Email [email protected] www.rta.nsw.gov.au RTA/Pub. -
Draft Bus Priority Treatment Guidelines
National Capital Region Transportation Planning Board Metropolitan Washington Council of Governments 777 North Capitol Street, NE | Suite 300 | Washington, DC 20002 Bus Priority Treatment Guidelines April 2011 in association with > Foursquare Integrated Transportation Planning > National Bus Rapid Transit Institute TPB Bus Priority Treatment Guidelines April 2011 TABLE OF CONTENTS APPENDIX A: SUMMARY OF FINDINGS AND LOCAL EXAMPLES OF PRIORITY INTRODUCTION.......................................................................................... 2 TREATMENTS ........................................................................................... 71 BACKGROUND ................................................................................................... 2 RICHMOND HIGHWAY EXPRESS (REX) ................................................................. 73 AUDIENCE FOR GUIDELINES ................................................................................. 3 METROBUS 79 GEORGIA AVENUE EXTRA LINE ...................................................... 78 ORGANIZATION OF GUIDEBOOK ............................................................................ 4 ETROBUS ISCONSIN VENUE XPRESS ETROBUS ENNSYLVANIA VENUE DEVELOPMENT OF GUIDELINES ............................................................................. 5 M 37 W A E / M 39 P A EXPRESS ........................................................................................................ 83 CHAPTER 1: PRIORITY BUS TREATMENTS OVERVIEW .................................. 6 -

AN ILLUSTRATED LEXICON of CYCLE FACILITIES Abstract
An Illustrated Lexicon of Cycle Facilities Lieswyn et al AN ILLUSTRATED LEXICON OF CYCLE FACILITIES Technical Note: 2 Walk and Cycle Conference, Hastings, February 2012 Authors: John Lieswyn (presenting) BSc, MET (pending) Transport Planner, ViaStrada Ltd Phone (027) 598 5019 [email protected] Andrew Macbeth Axel Wilke Jeanette Ward Jon Ashford Rick Houghton Warren Lloyd (All of ViaStrada Ltd) Abstract The purpose of this technical note is to define, describe and illustrate cycle facilities appropriate for use in New Zealand. The wide range of terms available for the various types of cycle facilities often results in confusion. The non-descript 'cycleway' is perhaps the most ambiguous term in common use, but other terms such as “cycle path” are interpreted in different ways by different people. With the growing interest in separated bicycle facilities (SBFs), this confusion is set to continue. This technical note attempts to reduce the current state of confusion by proposing terminology to define the various cycle facility types. It predominantly discusses mid-block facilities, rather than intersection facilities, as this is where most confusion seems to lie. The definitions are based on existing guides, legislation and the authors’ collective experience with cycle facility planning and design. For each facility type, a brief description and some high level advice is given. In addition to rationalising existing discrepancies, new (to New Zealand) terms for several types of SBFs and off road (typically unsealed) trails are proposed. It is hoped that the illustrated lexicon will contribute to improved understanding and further discussion amongst transportation practitioners, ultimately leading to the standardisation of cycle facility terminology in New Zealand. -

Tram Swillbe Running in the Citysoon
Trams will be running in the city soon VICTORIA SQUARE TO CITY WEST extension INFORMATION FOR • TRAM USERS • PEDESTRIANS • CITY MOTORISTS tramline ILLUSTRATION OF ADELAIDE RAILWAY STATION TRAM STOP (LOOKING WEST) WITH TWO NEW PEDESTRIAN CROSSINGS EACH SIDE OF THE NEW PLATFORM This brochure provides information information - it has been prepared about the new extended tram service for your safety and convenience. to city west. It also details the The trams will start running in the changes to traffic conditions along city from the end of September 2007 the new tramline corridor in the city. for driver training before the Whether you are a new or existing passenger service begins in mid tram user, pedestrian, cyclist or city October 2007. motorist you should know this ILLUSTRATION OF PIRIE STREET / WAYMOUTH STREET SCRAMBLE CROSSING WITH PEDESTRIANS WALKING ALL DIRECTIONS, AND ACCESSING PLATFORM FROM RAMPS INDICATING THE CORRECT PLACE TO CROSS THE ROAD AND WHERE IT IS ILLEGAL AND UNSAFE TO CROSS. New pedestrian crossings and accessing the new tram stops • New ‘scramble’ pedestrian crossings have been introduced in King William Street at the Pirie / Waymouth Street and Hindley Street / Rundle Mall intersections - allowing pedestrians to move safely and conveniently in all directions including diagonally across the intersection while all vehicle traffic is stopped. Scramble pedestrian crossing • Four new ‘standard’ pedestrian crossings have been signs now at the King William Street intersections with introduced on North Terrace to make crossing the road and Pirie / Waymouth Street and accessing the new city tram stops safer and more Rundle Mall / Hindley Street convenient (refer to the map on opposite page for the location of these new crossings). -
10 Tips for Riding in Urban Environments
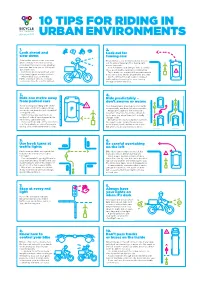
10 TIPS FOR RIDING IN URBAN ENVIRONMENTS 1.Look ahead & slow down 2.Look out for turning cars Look out for turning cars LookScan further ahead on the road and than what’s LookMost crashes out occur atfor intersections, so look out for directly in front of you and slow down if you’re drivers turningMost crashesleft or tuningoccur at right intersections, across your so look path. out for slownot sure whether down someone has seen you, or if turningdrivers turningcars left or tuning right across your path. they will give way to you. Scan for drivers indicating to turn, as well as those positionedScan to turn for drivers but not indicating indicating. to turn, as well as those ScanCommunicate further using ahead your on bell, the your road voice, than hand Most crashespositioned occur to turn at but intersections, not indicating. so look what’ssignals and directly eye contact. in front of you and outTry to for make driversTry eye to make contact turning eye withcontact left any with ordrivers anytuning drivers and ifright andyou if you can’t, slow, and be prepared to give way. slowWhen downriding close if you’re to moving not trafficsure orwhether parked across yourcan’t, path.slow, and be prepared to give way. someonecars, do so slowlyhas seen so you you, have or time if theyto react will to Don’tScan continue forDon’t drivers throughcontinue indicating througha gap in a stoppedgap to in stoppedturn, traffic as traffic well as givehazards. way to you. thosewithout positioned scanningwithout scanningfor ato car turn for coming a carbut coming through not throughindicating. -

Hamaoka Et. Al. 1 Safety Analysis Towards Introducing Roundabouts In
Hamaoka et. al. 1 Safety analysis towards introducing roundabouts in Japan Hidekatsu Hamaoka Associate Professor Department of Civil and Environmental Engineering Akita University Tegatagakuen-cho 1-1 Akita 010-8502 Japan Fax: +81 (18) 889-2975 Email: [email protected] Yoshiyuki Yoneyama East Japan Road Project Department Chodai Co., Ltd. Higashitabata 2-1-3 Kita-ku, Tokyo 114-0013 Japan Fax: +81 (3) 3894-3265 Email: [email protected] Takashi Oguchi Professor Division of Civil and Environmental Engineering Tokyo Metropolitan University Minamiosawa 1-1 Hachioji, Tokyo 192-0397 Japan Fax: +81 (42) 677-2772 Email: [email protected] Hideki Nakamura Professor Division of Civil Engineering Nagoya University Furo-cho, Chikusa-ku, Nagoya 464-8603 Japan Fax: +81 (52) 789-3837 Email: [email protected] Tatsuo Takase Associate Professor Department of Civil Engineering Shinshu University Wakasato 4-17-1 Nagano 380-8553 Japan Email: [email protected] Hamaoka et. al. 2 ABSTRACT Roundabouts have not yet gained acceptance as an option for reducing traffic fatalities at non-signalized intersections in Japan. The safety study of roundabouts is, therefore, most important for awaking road and traffic administrators from a state of ignorance in Japan. This report shows several recent Japanese activities for evaluating roundabout safety. One activity is comparison study between roundabout and non-signalized right-angled intersection. Japan does not have roundabouts until now. Therefore, user adaptations for roundabouts should be evaluated before their installation. There are many discussions in terms of roundabouts such as whether drivers could make a hook turn in the right turning case (left turn in the US), how to educate the rule to run through the roundabouts and so on. -
Ride with Confidence Know the Rules and Best Strategies to Reduce Your Risks and Ride with Confidence
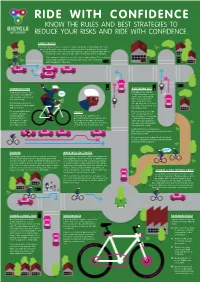
RIDE WITH CONFIDENCE KNOW THE RULES AND BEST STRATEGIES TO REDUCE YOUR RISKS AND RIDE WITH CONFIDENCE. CROSS TRAFFIC The main causes of serious crashes for riders are drivers crossing their path. Num- ber one is the right cross, which is a driver from the other direction turning right. So always scan for this and don’t proceed past a gap in stopped traffic without scanning for a car coming through, even if someone waves you through. The number two cause is cross traffic just not seeing riders. Try to make eye contact with any driver crossing your path. If you can’t, slow down and be prepared to give way. COMMUNICATION OVERTAKING LEFT Scan ahead and slow down Bike riders can overtake if you’re not sure whether on the left but have to give someone has seen you or if way to drivers turning left. they will give way. When a rider and driver arrive at an intersection Communicate using your side-by-side, the one in front bell, your voice, hand signals has right of way and the one and eye contact. behind gives way. Put on your lights when HELMET Bear in mind it can be diffi- it starts to get dark, cult—sometimes impossi- including daytime Your helmet should sit two fin- ble—for drivers to see a bike gloomy weather. A ger-widths above your eyebrows, with to their left and, therefore, good guide is to put the strap a finger space under your riders should be prepared to your lights on if the chin. -

Using Lego® to Engage with Communities Abstract
Using Lego® to Engage With Communities Jake Roos EVERYTHING IS AWESOME - USING LEGO® TO ENGAGE WITH COMMUNITIES Practice Paper Author Jake Roos (presenter) MAppSc BSc (Hons) Director Jake Roos Consulting Ltd [email protected] 022 6871980 ABSTRACT Lego® is a global phenomenon with broad appeal. Using Lego® bricks as a medium to explain and explore public projects is an effective means to engage people, to increase their understanding and gather their views. Kāpiti Coast District Council has used Lego® to explain its LED streetlight programme, the implementation of a cycle hook turn at a major intersection upgrade and create a shared vision for the future Paraparaumu Town Centre. The latter project won an Award from the International Association of Public Participation. All the projects were implemented by a variety of community groups, businesses and individual Lego® enthusiasts from ages 5 to 78 working together. This breadth of involvement led to a greater public understanding of the subject matter than otherwise might have been achieved. Using Lego® to Engage With Communities Jake Roos Page 1 INTRODUCTION Godtfred Kirk Christiansen developed the Lego® brick design and patented it in 1958, as a system of imaginative play that has since developed to become a global phenomenon. Lego® was voted the most popular toy of the last 100 years in a 2004 survey by the V&A Museum of Childhood in London (Herman, 2012). The Lego® Group (TLG) is now the world’s largest toy company by revenue (Wikipedia, n.d.). Its product appeals to males and females, young and old alike. Lego® has many advantages as a creative medium; namely, that it is easy to use, requires no tools, paints or adhesives, can be endlessly reused and rebuilt into new forms, is highly versatile and can make relatively sturdy, durable models (or ones that can be easily repaired) of practically any size. -

Traffic Regulations – Australian Road Rules 60 SCHEDULE 3 Regulation
Traffic Regulations – Australian Road Rules SCHEDULE 3 Regulation 71 AUSTRALIAN ROAD RULES PART 1 – INTRODUCTORY Division 1 – General 1 Australian Road Rules 2 Commencement 3 Object of the Australian Road Rules Division 2 – Some features of the Australian Road Rules 4 Definitions – the dictionary etc 5 Diagrams 6 Examples 7 Headings 8 Notes 9 Reader's Guide 10 Offences PART 2 – APPLICATION OF THE AUSTRALIAN ROAD RULES Division 1 – Roads and road-related areas 11 Australian Road Rules apply to vehicles and road users on roads and road-related areas 12 What is a road 13 What is a road-related area Division 2 – Road users and vehicles 14 Road users 15 What is a vehicle 16 Who is a driver 17 Who is a rider 18 Who is a pedestrian 19 References to driver includes rider etc PART 3 – SPEED-LIMITS 20 Obeying the speed-limit 21 Speed-limit where a speed-limit sign applies 22 Speed-limit in a speed-limited area 23 Speed-limit in a school zone 60 Traffic Regulations – Australian Road Rules 24 Speed-limit in a shared zone 25 Speed-limit elsewhere PART 4 – MAKING TURNS Division 1 – Left turns at intersections 26 Division does not apply to certain turns 27 Starting a left turn from a road (except a multi-lane road) 28 Starting a left turn from a multi-lane road 29 Making a left turn as indicated by a road marking Division 2 – Right turns (except hook turns) at intersections 30 Division does not apply to certain turns 31 Starting a right turn from a road (except a multi-lane road) 32 Starting a right turn from a multi-lane road 33 Making a right turn