(Desra) 2016 Conference
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Review on Deep Learning-Based Approaches for Automatic Sonar Target Recognition
electronics Review A Review on Deep Learning-Based Approaches for Automatic Sonar Target Recognition Dhiraj Neupane and Jongwon Seok * Department of Information and Communication Engineering, Changwon National University, Changwon-si, Gyeongsangnam-do 51140, Korea; [email protected] * Correspondence: [email protected] Received: 13 October 2020; Accepted: 19 November 2020; Published: 22 November 2020 Abstract: Underwater acoustics has been implemented mostly in the field of sound navigation and ranging (SONAR) procedures for submarine communication, the examination of maritime assets and environment surveying, target and object recognition, and measurement and study of acoustic sources in the underwater atmosphere. With the rapid development in science and technology, the advancement in sonar systems has increased, resulting in a decrement in underwater casualties. The sonar signal processing and automatic target recognition using sonar signals or imagery is itself a challenging process. Meanwhile, highly advanced data-driven machine-learning and deep learning-based methods are being implemented for acquiring several types of information from underwater sound data. This paper reviews the recent sonar automatic target recognition, tracking, or detection works using deep learning algorithms. A thorough study of the available works is done, and the operating procedure, results, and other necessary details regarding the data acquisition process, the dataset used, and the information regarding hyper-parameters is presented in -

Implementation of Adaptive and Synthetic-Aperture Processing Schemes in Integrated Active–Passive Sonar Systems
Implementation of Adaptive and Synthetic-Aperture Processing Schemes in Integrated Active–Passive Sonar Systems STERGIOS STERGIOPOULOS, SENIOR MEMBER, IEEE Progress in the implementation of state-of-the-art signal- NOMENCLATURE processing schemes in sonar systems is limited mainly by the moderate advancements made in sonar computing architectures Complex conjugate transpose operator. and the lack of operational evaluation of the advanced processing Power spectral density of signal . schemes. Until recently, matrix-based processing techniques, such as adaptive and synthetic-aperture processing, could not AG Array gain. be efficiently implemented in the current type of sonar systems, Small positive number designed to main- even though it is widely believed that they have advantages that can address the requirements associated with the difficult tain stability in normalized least mean operational problems that next-generation sonars will have to square adaptive algorithm. solve. Interestingly, adaptive and synthetic-aperture techniques Narrow-band beam-power pattern of may be viewed by other disciplines as conventional schemes. For a line array expressed by the sonar technology discipline, however, they are considered as advanced schemes because of the very limited progress that has . been made in their implementation in sonar systems. Broad-band beam-power pattern of a line This paper is intended to address issues of implementation of array steered at direction . advanced processing schemes in sonar systems and also to serve as a brief overview to the principles and applications of advanced Beams for conventional or adaptive sonar signal processing. The main development reported in beam formers or plane wave this paper deals with the definition of a generic beam-forming response of a line array steered structure that allows the implementation of nonconventional at direction and expressed by signal-processing techniques in integrated active–passive sonar . -

Compressive Underwater Sonar Imaging with Synthetic Aperture Processing
remote sensing Article Compressive Underwater Sonar Imaging with Synthetic Aperture Processing Ha-min Choi 1 , Hae-sang Yang 1 and Woo-jae Seong 1,2,* 1 Department of Naval Architecture and Ocean Engineering, Seoul National University, Seoul 08826, Korea; [email protected] (H.-m.C.); [email protected] (H.-s.Y.) 2 Research Institute of Marine Systems Engineering, Seoul National University, Seoul 08826, Korea * Correspondence: [email protected]; Tel.: +82-2-880-7332 Abstract: Synthetic aperture sonar (SAS) is a technique that acquires an underwater image by synthesizing the signal received by the sonar as it moves. By forming a synthetic aperture, the sonar overcomes physical limitations and shows superior resolution when compared with use of a side-scan sonar, which is another technique for obtaining underwater images. Conventional SAS algorithms require a high concentration of sampling in the time and space domains according to Nyquist theory. Because conventional SAS algorithms go through matched filtering, side lobes are generated, resulting in deterioration of imaging performance. To overcome the shortcomings of conventional SAS algorithms, such as the low imaging performance and the requirement for high-level sampling, this paper proposes SAS algorithms applying compressive sensing (CS). SAS imaging algorithms applying CS were formulated for a single sensor and uniform line array and were verified through simulation and experimental data. The simulation showed better resolution than the !-k algorithms, one of the representative conventional SAS algorithms, with minimal performance degradation by side lobes. The experimental data confirmed that the proposed method is superior and robust with respect to sensor loss. -

Signal Processing for Synthetic Aperture Sonar Image Enhancement
Signal Processing for Synthetic Aperture Sonar Image Enhancement Hayden J. Callow B.E. (Hons I) A thesis presented for the degree of Doctor of Philosophy in Electrical and Electronic Engineering at the University of Canterbury, Christchurch, New Zealand. April 2003 Abstract This thesis contains a description of SAS processing algorithms, offering improvements in Fourier-based reconstruction, motion-compensation, and autofocus. Fourier-based image reconstruction is reviewed and improvements shown as the result of improved system modelling. A number of new algorithms based on the wavenumber algorithm for correcting second order effects are proposed. In addition, a new framework for describing multiple-receiver reconstruction in terms of the bistatic geometry is presented and is a useful aid to understanding. Motion-compensation techniques for allowing Fourier-based reconstruction in wide- beam geometries suffering large-motion errors are discussed. A motion-compensation algorithm exploiting multiple receiver geometries is suggested and shown to provide substantial improvement in image quality. New motion compensation techniques for yaw correction using the wavenumber algorithm are discussed. A common framework for describing phase estimation is presented and techniques from a number of fields are reviewed within this framework. In addition a new proof is provided outlining the relationship between eigenvector-based autofocus phase esti- mation kernels and the phase-closure techniques used astronomical imaging. Micron- avigation techniques are reviewed and extensions to the shear average single-receiver micronavigation technique result in a 3{4 fold performance improvement when operat- ing on high-contrast images. The stripmap phase gradient autofocus (SPGA) algorithm is developed and extends spotlight SAR PGA to the wide-beam, wide-band stripmap geometries common in SAS imaging. -
Signal Processing Methods for Active Synthetic Aperture Sonar
FOI-R--0528--SE SWEDISH DEFENCE RESEARCH AGENCY FOI-R--0528--SE Systems Technology June 2002 SE-172 90 Stockholm ISSN 1650-1942 Sweden Technical Report Signal Processing Methods for Active Synthetic Aperture Sonar Mattias Jönsson Elias Parastates Geoffrey Shippey Jörgen Pihl Peter Karlsson Eva Dalberg Bernt Nilsson 1 FOI-R--0528--SE FOI-R--0528--SE Issuing organization Report number, ISRN Report type FOI-R--0528--SE Technical Report FOI - Swedish Defence Research Agency Systems Technology Research area code SE-172 90 Stockholm 4. C4ISR Sweden Month year Project number June 2002 E6053 Customers code 5. Commissioned Research Sub area code 43 Underwater Sensors Author/s (editor/s) Project manager Mattias Jönsson, Elias Parastates, Jörgen Pihl Geoffrey Shippey, Jörgen Pihl, Approved by Peter Karlsson, Eva Dalberg, Bernt Nilsson Sponsoring agency Swedish Armed Forces Scientifically and technically responsible Mattias Jönsson Report title Signal Processing Methods for Active Synthetic Aperture Sonar Abstract In the autumn 2001 FOI carried out a field experiment at the Älvsnabben test site in the southern Stockholm archipelago. The aim of the experiment was to test Synthetic Aperture Sonar (SAS) algorithms developed at FOI during the last two years. These algorithms had previously been used to analyse data from an earlier experiment at the Djupviken test site with good results. The same equipment was used in both experiments, but with minor modifications to the transmitter. Studies of the recorded data revealed several shortcomings in the experimental equipment and experimental mistakes which made the analysis very complicated. Most problems stemmed from the lack of a proper naviga- tion instrument on the Remotely Operated Vehicle (ROV) carrying the sonar. -

Results from Developments in the Use of a Scanning Sonar to Support Diving Operations from a Rescue Ship
remote sensing Article Results from Developments in the Use of a Scanning Sonar to Support Diving Operations from a Rescue Ship Artur Grz ˛adziel Department of Navigation and Hydrography, Faculty of Navigation and Naval Weapons, Polish Naval Academy, 81-127 Gdynia, Poland; [email protected] Received: 31 January 2020; Accepted: 17 February 2020; Published: 20 February 2020 Abstract: In recent years, widespread use of scanning sonars for acoustic imaging of the seabed surface can be observed. These types of sonars are mainly used with tripods or special booms, or are mounted onboard remotely operated or unmanned vehicles. Typical scanning sonar applications include search and recovery operations, imaging of underwater infrastructure, and scour monitoring. The use of these sonars is often limited to shallow waters. Diver teams or underwater remotely operated vehicles (ROV) are commonly used to inspect shipwrecks, port wharfs, and ship hulls. However, reduced underwater visibility, submerged debris, and extreme water depths can limit divers’ capabilities. In this paper, a novel, nonstandard technique for use of a scanning sonar is proposed. The new application for scanning sonar technology is a practical solution developed on the Polish Navy’s search and rescue ship “Lech.” To verify the effectiveness of the proposed technique, the author took part in four different studies carried out in the southeastern Baltic Sea. The tests were performed using the MS 1000 scanning sonar. The results demonstrate that the proposed technique has the potential to provide detailed sonar images of the seabed and underwater objects before the descent of divers. The divers get acquainted with the underwater situation, which undoubtedly increases the safety of the entire operation. -
Introduction to Synthetic Aperture Sonar
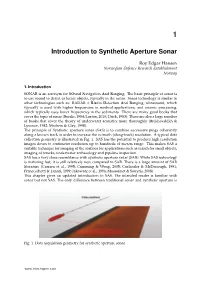
10 Introduction to Synthetic Aperture Sonar Roy Edgar Hansen Norwegian Defence Research Establishment Norway 1. Introduction SONAR is an acronym for SOund Navigation And Ranging. The basic principle of sonar is to use sound to detect or locate objects, typically in the ocean. Sonar technology is similar to other technologies such as: RADAR = RAdio Detection And Ranging; ultrasound, which typically is used with higher frequencies in medical applications; and seismic processing, which typically uses lower frequencies in the sediments. There are many good books that cover the topic of sonar (Burdic, 1984; Lurton, 2010; Urick, 1983). There are also a large number of books that cover the theory of underwater acoustics more thoroughly (Brekhovskikh & Lysanov, 1982; Medwin & Clay, 1998). The principle of Synthetic aperture sonar (SAS) is to combine successive pings coherently along a known track in order to increase the azimuth (along-track) resolution. A typical data collection geometry is illustrated in Fig. 1. SAS has the potential to produce high resolution images down to centimeter resolution up to hundreds of meters range. This makes SAS a suitable technique for imaging of the seafloor for applications such as search for small objects, imaging of wrecks, underwater archaeology and pipeline inspection. SAS has a very close resemblance with synthetic aperture radar (SAR). While SAS technology is maturing fast, it is still relatively new compared to SAR. There is a large amount of SAR literature (Carrara et al., 1995; Cumming & Wong, 2005; Curlander & McDonough, 1991; Franceschetti & Lanari, 1999; Jakowatz et al., 1996; Massonnet & Souyris, 2008). This chapter gives an updated introduction to SAS. -

Underwater Acoustics
Sound Perspectives TECHNICAL COMMIttee REPOrt Underwater Acoustics Megan S. Ballard The Technical Committee on Underwater Acoustics is concerned with sound-wave phe- Postal: nomena underwater and with the interaction of sound with the boundaries of the oceans. Applied Research Laboratories The University of Texas at Austin In contrast to electromagnetic waves, which are highly attenuated in water, acous- PO Box 8029 tic waves can propagate long distances in underwater environments. For this rea- Austin, Texas 78713-8029 son, sound waves are used in water in much the same way that electromagnetic USA waves are used in the atmosphere to sense the environment and communicate. The Technical Committee (TC) on Underwater Acoustics (TCUW) is concerned Email: with sound-wave phenomena underwater and with the interaction of sound with [email protected] the boundaries of the ocean (the seabed and sea surface), with emphasis on the following topics: wave propagation, scattering and reverberation, ambient noise, sonar processing, and underwater acoustic instrumentation. The field of underwa- ter acoustics has a rich history that has been motivated by and asserted influence on world events. According to Goodman (2004), “The development of underwater acoustics in the Twentieth Century was closely related to, and for the most part, driven by the significant world events of the time, e.g., two world wars and the en- suing Cold War. No other field of acoustics was so affected by these events or had such importance in their outcome.” Today, work done by members of the TCUW represents a broad area of research, including topics with applications to fisher- ies, climate change, environmental remediation, and underwater communication. -

Literature Review: Understanding the Current State of Autonomous Technologies to Improve/Expand Observation and Detection of Marine Species
LITERATURE REVIEW: UNDERSTANDING THE CURRENT STATE OF AUTONOMOUS TECHNOLOGIES TO IMPROVE/EXPAND OBSERVATION AND DETECTION OF MARINE SPECIES Title: Autonomous Technology DATE: July 2016 REPORT CODE: SMRUC-OGP-2015-015 THIS REPORT IS TO BE CITED AS: VERFUSS U. K., ANICETO, A. S., BIUW, M., FIELDING, S. GILLESPIE, D., HARRIS, D., JIMENEZ, G., JOHNSTON, P., PLUNKETT, R., SIVERTSEN, A., SOLBØ, A., STORVOLD, R. AND WYATT, R. 2016. LITERATURE REVIEW: UNDERSTANDING THE CURRENT STATE OF AUTONOMOUS TECHNOLOGIES TO IMPROVE/EXPAND OBSERVATION AND DETECTION OF MARINE SPECIES. REPORT NUMBER SMRUC-OGP2015- 015 PROVIDED TO IOGP, July 2016. Cover photo: AutoNaut completing a PAM mission. © Peter Bromley. For its part, the Buyer acknowledges that Reports supplied by the Seller as part of the Services may be misleading if not read in their entirety, and can misrepresent the position if presented in selectively edited form. Accordingly, the Buyer undertakes that it will make use of Reports only in unedited form, and will use reasonable endeavours to procure that its client under the Main Contract does likewise. As a minimum, a full copy of our Report must be appended to the broader Report to the client. Title: Autonomous Technology DATE: July 2016 REPORT CODE: SMRUC-OGP-2015-015 1 Contents 1 Contents ........................................................................................................................................................ 3 2 Figures .......................................................................................................................................................... -

Marine Technology Reporter
MARINE TECHNOLOGY REPORTER July/August 2016 www.marinetechnologynews.com 11th Annual MTR100 Volume 59 Number 6 Volume Marine Technology Reporter Cover July Aug 2016.indd 1 7/28/2016 10:14:28 AM MTR May 16 Covers 2,3 and 4.indd 1 4/22/2016 2:28:59 PM MTR #6 (1-17).indd 1 7/21/2016 10:39:37 AM July/August 2016 MTR 100 Contents Volume 59 • Number 6 2G Robotics ................................................................... 74 MetOcean Data Systems ...............................................60 The Alfred Wegener Institute .........................................48 MRV Systems LLC ..........................................................58 Allspeeds Ltd. .................................................................6 Multi-Electronique (MTE) Inc. ........................................58 Aquabotix Technology Corporation ................................ 74 The National Oceanography Centre ..............................46 Aquatec Group .................................................................6 nke Instrumentation ......................................................58 Aquatic Engineering & Construction Ltd .........................6 Nortek AS .......................................................................69 Aqueos Corporation .........................................................6 NOVACAVI .......................................................................58 ASL Environmental Sciences ...........................................8 Novan Research .............................................................62 -

Introduction to Sonar
Introduction to sonar Roy Edgar Hansen∗ Course materiel to INF-GEO4310, University of Oslo, Autumn 2012 (Dated: September 26, 2012) This paper gives a short introduction to underwater sound and the principle of sonar. In addition, the paper describes the use of sonar in three different applications: fish finding; mapping of the seafloor and imaging of the seafloor. I. INTRODUCTION SONAR is the acronym for SOund Navigation And Ranging. Sonar techology is similar to other technologies such as: RADAR = RAdio Detection And Ranging; ul- trasound, which typically is used with higher frequencies FIG. 2 A sound wave is a longitudal perturbation of pressure in medical applications; seismics, which typically uses lower frequencies in the sediments. The knowledge and understanding of underwater sound is not new. Leonardo Da Vinci discovered in 1490 • Wave period T [s] that acoustics propagate well in the ocean: • Frequency f = 1=T [Hz] • Sound speed c [m/s] \If you cause your ship to stop and place the • Wavelength λ = c=f [m] head of a long tube in the water and place the outer extremity to your ear, you will hear A small note about units. Logarithmic scale, and in ships at a great distance from you" particular the Decibel scale (referred to as dB), is often used in sonar literature (including this paper). The dB The first active sonar designed in the same way modern scale is defined as sonar is, was invented and developed as a direct conse- quence of the loss of Titanic in 1912, where the basic requirement was to detect icebergs in 2 miles distance. -

Ocean, Platform, and Signal Processing Effects on Synthetic Aperture Sonar Performance
AD-A267 288 N Ocean, Platform, and Signal Processing Effects on -• Synthetic Aperture Sonar Performance by Kenneth D. Rolt DTIC fS ELECTE Submitted in partial fulfillment AUG 0 3 1993 of the requirements for the degree of U A U Scientiae Magister at the Massachusetts Institute of Technology Cambridge, MA 02139 February 1991 © Kenneth D. Rolt, 1990; All rights reserved. The author hereby grants MIT and the C.S. Draper Laboratory permission to reproduce and/or distribute copies of this thesis in-whole or in-part. Signature of Author_________________________________ Department of Ocean Engineering 28 November 1990 Certified by Professor Jerome Milgram Thesis Co-Supervisor Certified by Professor Henrik Schmidt Thesis Co-Supervisor Accepted by Professor A. Douglas Carmichael Chairman, Ocean Engineering Graduate Committee This document ha- b"en approved fo: public relea-e and sale; its distribution is un1imite . 4k # Ocean, Platform, and Signal Processing Effects on Synthetic Aperture Sonar Performance by Kenneth D. Rolt keywords: synthetic aperturesonar (SAS), synthetic aperture radar(SAR), acousticalimaging, radarimaging ABSTRACT Synthetic Aperture Sonar (SAS), the underwater sound application of the aperture synthesis method borrowed from Synthetic Aperture Radar (SAR) is investigated by means of oceaa nitdium effects, platform motion effects, and signal processing effects. Synthetic aperture methods, both in radar and in sonar, allow large synthesized apertures, or equivalently synthesized arrays, to be formed from the combined use of signal processing and a small, real aperture transducer (e.g. a radar or a sonar transducer). Large synthetic apertures give rise to relatively narrow synthesized beams, which in turn allow very high resolution focused images to be formed from radar or sonar data.