Modeling-And-Simulation-Of-Mineral
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Chapter-7 Gravity Concentration of Iron Ore
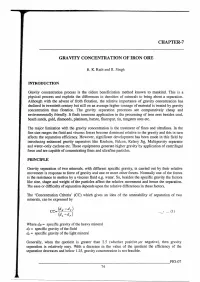
CHAPTER-7 GRAVITY CONCENTRATION OF IRON ORE R. K. Rath and R. Singh INTRODUCTION Gravity concentration process is the oldest beneficiation method known to mankind. This is a physical process and exploits the differences in densities of minerals to bring about a separation. Although with the advent of froth flotation, the relative importance of gravity concentration has declined in twentieth century but still on an average higher tonnage of material is treated by gravity concentration than flotation. The gravity separation processes are comparatively cheap and environmentally friendly. It finds immense application in the processing of iron ores besides coal, beach sands, gold, diamonds, platinum, baryte, fluorspar, tin, tungsten ores etc. The major limitation with the gravity concentration is the treatment of fines and ultrafines. In the fine size ranges the fluid and viscous forces become dominant relative to the gravity and this in turn affects the separation efficiency. However, significant development has been made in this field by introducing enhanced gravity separators like Knelson, Falcon, Kelsey Jig, Multigravity separator and water—only cyclone etc. These equipments generate higher gravity by application of centrifugal force and are capable of concentrating fines and ultrafine particles. PRINCIPLE Gravity separation of two minerals, with different specific gravity, is carried out by their relative movement is response to force of gravity and one or more other forces. Normally one of the forces is the resistance to motion by a viscous fluid e.g. water. So, besides the specific gravity the factors like size, shape and weight of the particles affect the relative movement and hence the separation. -

Gold, Platinum and Diamond Placer Deposits in Alluvial Gravels, Whitecourt, Alberta Special Report 89
Special Report 89 Gold, Platinum and Diamond Placer Deposits in Alluvial Gravels, Whitecourt, Alberta Special Report 89 Gold, Platinum and Diamond Placer Deposits in Alluvial Gravels, Whitecourt, Alberta G.G. Mudaliar1, J.P. Richards1 and D.R Eccles2 1 Department of Earth & Atmospheric Sciences, University of Alberta 2 Alberta Geological Survey May 2007 ©Her Majesty the Queen in Right of Alberta, 2007 ISBN 0-7785-3851-6 The Alberta Geological Survey and its employees and contractors make no warranty, guarantee or representation, express or implied, or assume any legal liability regarding the correctness, accuracy, completeness, or reliability of this publication. Any digital data and software supplied with this publication are subject to the licence conditions (specified in 'Licence Agreement for Digital Products'"). The data are supplied on the understanding that they are for the sole use of the licensee, and will not be redistributed in any form, in whole or in part, to third parties. Any references to proprietary software in the documentation, and/or any use of proprietary data formats in this release does not constitute endorsement by the Alberta Geological Survey of any manufacturer's product. This product is an EUB/AGS Special Report; the information is provided as received from the author and has had minimal editing for conformity to EUB/AGS standards. When using information from this publication in other publications or presentations, due acknowledgment should be given to the Alberta Geological Survey/Alberta Energy and Utilities Board. The following reference format is recommended: Mudaliar, G.G., Richards, J.P. and Eccles, D.R. (2007): Gold, platinum and diamond placer deposits in alluvial gravels, Whitecourt, Alberta; Alberta Energy and Utilities Board, EUB/AGS, SPE 089, 24 p. -

Evaluation of the Four Inch Compound Water Cyclone As a Fine Gold Concentrator Using Radiotracer Tecjiniques
MIRL REPORT NO. 70 EVALUATION OF THE FOUR INCH COMPOUND WATER CYCLONE AS A FINE GOLD CONCENTRATOR USING RADIOTRACER TECJINIQUES By DANIEL E. WALSH MINERAL INDUSTRY RESEARCH LABORATORY School of Mineral Engineering University of Alaska Fairbanks Fairbanks, Alaska 99775-1180 September, 1985 MIRL REPORT NO. 70 EVALUATION OF THE FOUR INCH COMPOUND WATER CYCLONE AS A FINE GOLD CONCENTRATOR USING RADIOTRACER TECHNIQUES By DANIEL E. WALSH MINERAL INDUSTRY RESEARCH LABORATORY School of Mineral Engineering, University of Alaska Fairbanks Fairbanks, Alaska 99775-1180 September, 1985 ABSTRACT A 4 inch compound water cyclone, ewc, was tested to evaluate its gold recovery characteristics when processing minus 3/16 inch, run-of-pit, placer material. Neutron activated placer gold particles (841 to 37 microns) were used as radiotraCers concentratorrecovery; a procedure believed unique to this study. Theeffect on goldrecovery ofgold size and shape, feed pulp density, feed pressure, vortex fmder clearance (VFC), CWC cone type, top-size of the feed solids, presence or absence of heavy minerals in the feed, and the quantity of -400 mesh slimes in the feed was investigated in over 300 tests. ewc concentration ratio and the top-size of the underflow solids were both affected by cone type, VFC, and feed pressure. Gold recovery was significantly affected by gold size, gold shape, and concentration ratio. These effects are complex, since significant size-concentration ratio and size-shape interactions exist. Radiotraeer techniques showed gold particles had a residence time within the ewc of approximately one second, thus challenging the three stage, segregated bed theory of ewc concentration. This work suggests CWC gold recovery is a function of particle size and shape, and the water flow rate through the CWC. -

Equipment Company Handbook
Denver Equipment Company Handbook Copyriqht 1954 by Denver Equipment Company 1400 Seventeenth Street Denver 17, Colorado Cable Address: DECO Denver Telephone: Denver,Colorado-CHerry 4466 PRINTED JX U. S. A. I 1 DECO Engineers Handbook No. 1 is dedi- cated to the world-wide profession of engi- neers whose responsibility it is to supply Denver Equipment Company .. essential minerals to industry and to do it with the greatest possible profit from mill COLORADO. Denver 17 operation. Denver Equipment Company 1400 Seventeenth Street P.O. Box 5268 Equipment and accompanying specifi- NEW YORK, cations has been designed to give contin- New York City 1 uous "24 Hour Se~ce"because the age Denver Equipment Company old saying "one hour's delay means no 41 14 Empire State Bldg. profit today" is more important now with ILLINOIS, Chicago 1 increased operating costs than ever before. Denver Equipment Company 1123-24 Bell Building We have tried to supply in this hand- 307 No. Michigun Avenue book baaic enqineering fats and data on TEXAS, El Paso equipment as we11 as frequently used tablea Denver Equipment Company and conversion charta UTAH, Salt Lake City Denver Equipment Company This book is designed to help you. There P. 0.Box 705 may be other ways that we may help yo& MEXICO, Mexico, D.F. Denver Equipment Co., S.A. and if so, please let us know because it is 14 Avenida Juorez, Derpacho 615 our sincere desire to be of service. All we CANADA, Toronto 1 ask is the opportunity to make you "Hap Denver Equipment Co. -

Gravity Concentration
Gravity concentration Introduction Gravity techniques to recover residual valu- able heavy minerals in flotation tailings are being Gravity methods of separation are used to treat a increasingly used. Apart from current production, great variety of materials, ranging from heavy metal there are many large tailings dumps which could be sulphides such as galena (sp. gr. 7.5) to coal (sp. gr. excavated cheaply and processed to give high value 1.3), at particle sizes in some cases below 50 txm. concentrates using recently developed technology. These methods declined in importance in the first half of the twentieth century due to the develop- ment of the froth-flotation process, which allows Principles of gravity concentration the selective treatment of low-grade complex ores. Gravity concentration methods separate minerals of They remained, however, the main concentrating different specific gravity by their relative move- methods for iron and tungsten ores and are used ment in response to gravity and one or more extensively for treating tin ores, coal and many other forces, the latter often being the resistance to industrial minerals. motion offered by a viscous fluid, such as water In recent years, many companies have or air. re-evaluated gravity systems due to increasing It is essential for effective separation that a costs of flotation reagents, the relative simplicity marked density difference exists between the of gravity processes, and the fact that they mineral and the gangue. Some idea of the type of produce comparatively little environmental pollu- separation possible can be gained from the concen- tion. Modern gravity techniques have proved effi- tration criterion cient for concentration of minerals having particle D h - Df sizes in the 50txm range and, when coupled with (10.1) improved pumping technology and instrumenta- D 1 - Df tion, have been incorporated in high-capacity plants where D h is the specific gravity of the heavy (Holland-Batt, 1998). -

Alaska Conference on Placer Mining
PROCEEDINGS OF THE EIGHTH ANNUAL ALASKA CONFERENCE ON PLACER MINING 'PLACER MINING: YESTERDAY, TODAY, TOMORROW" APRIL 2-5, 1986 P. Jeffrey Burton and Henry C. Berg Front cover: The Tuluhsok Dredqlns Company 'r dredge near ~Vyac.Alaska. Bull! by Washlngfon Iron Works. the dredge 110s a jlh.1'13 bueher cawcity. Photo courtesy of T.K. Bundlxen. 1987 1986 PLACER-MINING CONFERENCE COMMITTEE Ro.se Rybachek (Livengood-Tolovans mining .....Conference Coordinator district) Gail Ackels (Circle mining district) ......... Entertainment Chairperson Mary Albanese (Alaska Division of.. ..........Poster and Session Chairperson Geological and Geophysical Surveys) Lela Bouton (Koyukuk mining district) ........Advertising Chairperson Roger Burggraf (Fairbanks mining district) ...Member Jeffrey Burton (Alaska Miners Association) ...Speaker Coordinator and Session Chairperson Curt Freeman (Placer Miners of Alaska) .......Session Chairperson Kathy Goff (Alaska Division of Geological ....Assistant Conference Coordinator and Geophysical Surveys) and Session Chairperson William Lex (Tanana Valley Community .........Member College) Dr. David Maneval (School of Mineral .........Member Engineering, University of Alaska) Ron Rosander (Alaska Miners Association) .....Member Bruce Stillwell (Placer Miners of Alaska) ....Member Rosaline Stowell (Alaska Women in Mining) ....Exhibit Chairperson Helen Warner (Miners Advocacy Council) .......Member De Weber (~laskaWomen in Mining) .......,.,..Assistant Conference Coordinator CONFERENCE SPONSORED BY Alaska Miners Association -

PDF File Generated From
OCCASION This publication has been made available to the public on the occasion of the 50th anniversary of the United Nations Industrial Development Organisation. DISCLAIMER This document has been produced without formal United Nations editing. The designations employed and the presentation of the material in this document do not imply the expression of any opinion whatsoever on the part of the Secretariat of the United Nations Industrial Development Organization (UNIDO) concerning the legal status of any country, territory, city or area or of its authorities, or concerning the delimitation of its frontiers or boundaries, or its economic system or degree of development. Designations such as “developed”, “industrialized” and “developing” are intended for statistical convenience and do not necessarily express a judgment about the stage reached by a particular country or area in the development process. Mention of firm names or commercial products does not constitute an endorsement by UNIDO. FAIR USE POLICY Any part of this publication may be quoted and referenced for educational and research purposes without additional permission from UNIDO. However, those who make use of quoting and referencing this publication are requested to follow the Fair Use Policy of giving due credit to UNIDO. CONTACT Please contact [email protected] for further information concerning UNIDO publications. For more information about UNIDO, please visit us at www.unido.org UNITED NATIONS INDUSTRIAL DEVELOPMENT ORGANIZATION Vienna International Centre, P.O. Box -

Gravity Concentration of Fines and Ultrafines
PROCEEDINGS: PROF-97 ®NML. JAMSHEDPUR: pp.40-56 Gravity concentration of fines and ultrafines R. SINGH, K. K. BHATTACHARYYA and S . C. MAULIK National Metallurgical Laboraton,, Jamshedpur - 831 007. ABSTRACT Concentration of fines by gravity methods remains one of the challenging problems to the world mineral industry. Considering the increasing losses of mineral values and the search for an economic process, it has been the major concern of the researchers and the practicing engineers to develop an efficient fine gravity separator. The development of some of the recent fine gravity separators with the application of high centrifugalforces has resulted in improvement in the separation efficiency. In the last four de- cades extensive studies have been carried out at National Metallurgical Laboratory (NML), Jamshedpur to develop gravity based processes for low grade ores, fines and industrial wastes involving the conventional separators to the latest equipment like multi -gravity separator for their economic exploitation . In this paper an attempt has been made to briefly present a review of the gravity concentration processes with a particular reference to the recent advances in the processing of fines. The salient results obtainedfrom the recent studies carried out on beneficiation of lean grade finely disseminated tungsten ore, iron ore slimes and chromite slimes at NML using some fine gravity separators like Bartles -Motley Vanner, GEC-duplex concentrator and MGS are discussed. INTROD UCTION Gravity concentration process which exploits the differences in densities of minerals to bring about a separation, is the oldest beneficiation method known to mankind. Although with the advent of froth flotation, the relative importance of gravity concentration has declined in twentieth century but still on an average higher tonnage of material is treated by gravity concentration than flotation. -

Gravity Concentration
Gravity concentration Introduction Gravity techniques to recover residual valu- able heavy minerals in flotation tailings are being Gravity methods of separation are used to treat a increasingly used. Apart from current production, great variety of materials, ranging from heavy metal there are many large tailings dumps which could be sulphides such as galena (sp. gr. 7.5) to coal (sp. gr. excavated cheaply and processed to give high value 1.3), at particle sizes in some cases below 50 txm. concentrates using recently developed technology. These methods declined in importance in the first half of the twentieth century due to the develop- ment of the froth-flotation process, which allows Principles of gravity concentration the selective treatment of low-grade complex ores. Gravity concentration methods separate minerals of They remained, however, the main concentrating different specific gravity by their relative move- methods for iron and tungsten ores and are used ment in response to gravity and one or more extensively for treating tin ores, coal and many other forces, the latter often being the resistance to industrial minerals. motion offered by a viscous fluid, such as water In recent years, many companies have or air. re-evaluated gravity systems due to increasing It is essential for effective separation that a costs of flotation reagents, the relative simplicity marked density difference exists between the of gravity processes, and the fact that they mineral and the gangue. Some idea of the type of produce comparatively little environmental pollu- separation possible can be gained from the concen- tion. Modern gravity techniques have proved effi- tration criterion cient for concentration of minerals having particle D h - Df sizes in the 50txm range and, when coupled with (10.1) improved pumping technology and instrumenta- D 1 - Df tion, have been incorporated in high-capacity plants where D h is the specific gravity of the heavy (Holland-Batt, 1998). -

Beneficiation of Tungsten Ores in India: a Review
Bull. Mater. Sci., Vol. 19, No. 2, April 1996, pp. 201-265. ~('., Printed in India. Beneficiation of tungsten ores in India: A review N KRISHNA RAO Ore Dressing Section, Bhabha Atomic Research Centre, Begumpet, Hyderabad 500016, India Abstract. Tungsten is a strategic metal for India, and almost the entire requirement is met by imports. Extensive search for tungsten in recent years has led to the discovery of several deposits. However, almost all these are of low grade compared to world resources. Techno- economic exploitation of these deposits depends to a great extent on the development of suitable beneficiation technology within the framework of an ore-to-product integrated approach. This paper presents a review of the current research and development status of beneficiation technology applicable to these deposits. The deposits covered are: (i) Degana, comprising of four distinct types, namely, quartz vein, eluvial, phyllite and granite, (ii) Balda, (iii) Khobna-Kuhi-Agargoan, (iv) Burugubanda- Tapaskonda, (v) Scheelite-bearing gold ores of Kolar and Hutti, and (vi) Madurai. Investiga- tions on these ores have been mainly carried out by BARC, IBM, BRGM (France), NML and RRL (Bhubaneswar). While studies of BARC have been described in detail, those of the other laboratories are briefly discussed. Emphasis has been laid on discussing the industrial flow-sheets recommended during these investigations. The strategy needed for the techno-economic feasibility of beneficiation of low grade tungsten ores are (i) effective pre-concentration at as coarse a size as possible, (ii) emphasis on higher recovery rather than on high grade of the concentrate,(iii) a two-product approach, one of high grade feasible by physical beneficiation methods and the other of low grade, to be upgraded by chemical methods to directly usable products, thus maximizing recovery, and (iv) a maximum utilization concept, aiming to recover all possible byproducts. -
Characterization and Study of the Preliminary Process Flowsheet of a Tungsten Ore, Final Report
GM 64322 CHARACTERIZATION AND STUDY OF THE PRELIMINARY PROCESS FLOWSHEET OF A TUNGSTEN ORE, FINAL REPORT KEN WRIGHT' Characterization and study of the preliminary process flowsheet of a tungsten ore FINAL REPORT No:T920 For: Mr. Ken Wright 408 Commercial Avenue Coos Bay, OR 97420 USA GM 64322 Prepared by: /eca.auth.!er M Sc: Coordinator riban, D.E:S. S°: Director Technology: Donal®" " éx, Eng , Ph.D.`; Date April a, 2008 ingu AU'"lAgF Ressources naturelles et Faune, Québec 0 2 AVR. 2009 1 7 AOUT 2009 ;l;néral t)i(ectiori JcrcNNVC"" DIR. INFORM. GÉOL. C„OREM 1180 rue, de la Minéralogie, Québec (Québec) GiN _1X7 Canada St' (418).527.8211. •'t "(418)';527-9188 GGE1,143 (2005.12=13); x 79 603 3 ii• SUMMARY Mr. Wright contracted COREM to conduct a mineralogical study of two (2) samples: a sample from a zone with tungsten between 5 and 15% (tungsten-rich sample) and a sample from a zone with about 37 ppm of gold (gold-rich sample). The Client requested to carry out also a literature review of existing flowsheets for tungsten bearing ore. The first goal was to identify major minerals and estimate the liberation sizes of tungsten phases and of gold. The second goal was to present a summary of existing process flowsheets found in the literature review. Both samples were composed of scheelite, pyrite, feldspars, carbonates, quartz, ferromagnesian silicate and apatite. Galena, magnetite and iron hydroxide were observed in the gold-rich sample. Liberation size of scheelite was between 53 and 75 pm in the tungsten-rich sample and below 38 pm in the gold-rich sample.