Collaborative Optimization for Train Scheduling and Train Stop Planning on High-Speed Railways$
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Pioneering the Application of High Speed Rail Express Trainsets in the United States
Parsons Brinckerhoff 2010 William Barclay Parsons Fellowship Monograph 26 Pioneering the Application of High Speed Rail Express Trainsets in the United States Fellow: Francis P. Banko Professional Associate Principal Project Manager Lead Investigator: Jackson H. Xue Rail Vehicle Engineer December 2012 136763_Cover.indd 1 3/22/13 7:38 AM 136763_Cover.indd 1 3/22/13 7:38 AM Parsons Brinckerhoff 2010 William Barclay Parsons Fellowship Monograph 26 Pioneering the Application of High Speed Rail Express Trainsets in the United States Fellow: Francis P. Banko Professional Associate Principal Project Manager Lead Investigator: Jackson H. Xue Rail Vehicle Engineer December 2012 First Printing 2013 Copyright © 2013, Parsons Brinckerhoff Group Inc. All rights reserved. No part of this work may be reproduced or used in any form or by any means—graphic, electronic, mechanical (including photocopying), recording, taping, or information or retrieval systems—without permission of the pub- lisher. Published by: Parsons Brinckerhoff Group Inc. One Penn Plaza New York, New York 10119 Graphics Database: V212 CONTENTS FOREWORD XV PREFACE XVII PART 1: INTRODUCTION 1 CHAPTER 1 INTRODUCTION TO THE RESEARCH 3 1.1 Unprecedented Support for High Speed Rail in the U.S. ....................3 1.2 Pioneering the Application of High Speed Rail Express Trainsets in the U.S. .....4 1.3 Research Objectives . 6 1.4 William Barclay Parsons Fellowship Participants ...........................6 1.5 Host Manufacturers and Operators......................................7 1.6 A Snapshot in Time .................................................10 CHAPTER 2 HOST MANUFACTURERS AND OPERATORS, THEIR PRODUCTS AND SERVICES 11 2.1 Overview . 11 2.2 Introduction to Host HSR Manufacturers . 11 2.3 Introduction to Host HSR Operators and Regulatory Agencies . -
Overseas Deployment of Shinkansen Systems / Taiwan High Speed Rail
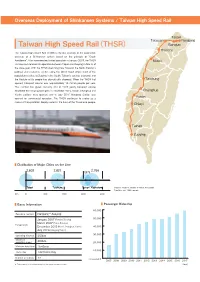
Overseas Deployment of Shinkansen Systems / Taiwan High Speed Rail Taipei Taoyuan Nangang Taiwan High Speed Rail( THSR) Banqiao Hsinchu The Taiwan High Speed Rail (THSR) is the first example of the exportation overseas of a Shinkansen system based on the principle of “Crash Avoidance”. After commencing limited operation in January 2007, the THSR Miaoli commenced commercial operation between Taipei and Zuoying in March of the same year. With the THSR stretching from Taipei in the North, Taiwan’s political and economic center, along the West Coast where most of the population resides, to Zuoying in the South, Taiwan’s society, economy, and the lifestyle of its people has dramatically changed. When the THSR first Taichung opened, transport volume was approximately 15 million people per year. This number has grown annually and in 2017 yearly transport volume exceeded 60 million passengers. In December 2015, Miaoli, Changhua and Changhua Yunlin stations were opened, and in July 2016 Nangang Station was Yunlin opened for commercial operation. The THSR continues to evolve as a means of transportation deeply rooted in the lives of the Taiwanese people. Chiayi Tainan Zuoying ■ Distribution of Major Cities on the Line 2,602 2,821 2,766 1,875 Taipei Taichung Tainan Kaohsiung Statistics Yearbook, Ministry of Interior, ROC(2020) Population unit: 1,000’s people km 0 100 200 300 400 ■ Basic Information ■ Passenger Ridership 60,000 Operating segment Nangang-Zuoying 50,000 January 2007 (Banqiao-Zuoying) March 2007 (Taipei-Banqiao) Inauguration December 2015 (Miaoli, Changhua, Yunlin) 40,000 July 2016 (Nangang-Taipei) 30,000 Operating distance 350km Maximum 300km operating speed 20,000 Minimum travel time 1h 45min 10,000 Trains/day 142 trains/day Number of stations 12 (Thousand)0 2007 2008 2009 2010 2011 2012 20 13 2014 2015 2016 2017 ※ Train number is calculated based on the annual number of trains. -

Shinkansen - Wikipedia 7/3/20, 10�48 AM
Shinkansen - Wikipedia 7/3/20, 10)48 AM Shinkansen The Shinkansen (Japanese: 新幹線, pronounced [ɕiŋkaꜜɰ̃ seɴ], lit. ''new trunk line''), colloquially known in English as the bullet train, is a network of high-speed railway lines in Japan. Initially, it was built to connect distant Japanese regions with Tokyo, the capital, in order to aid economic growth and development. Beyond long-distance travel, some sections around the largest metropolitan areas are used as a commuter rail network.[1][2] It is operated by five Japan Railways Group companies. A lineup of JR East Shinkansen trains in October Over the Shinkansen's 50-plus year history, carrying 2012 over 10 billion passengers, there has been not a single passenger fatality or injury due to train accidents.[3] Starting with the Tōkaidō Shinkansen (515.4 km, 320.3 mi) in 1964,[4] the network has expanded to currently consist of 2,764.6 km (1,717.8 mi) of lines with maximum speeds of 240–320 km/h (150– 200 mph), 283.5 km (176.2 mi) of Mini-Shinkansen lines with a maximum speed of 130 km/h (80 mph), and 10.3 km (6.4 mi) of spur lines with Shinkansen services.[5] The network presently links most major A lineup of JR West Shinkansen trains in October cities on the islands of Honshu and Kyushu, and 2008 Hakodate on northern island of Hokkaido, with an extension to Sapporo under construction and scheduled to commence in March 2031.[6] The maximum operating speed is 320 km/h (200 mph) (on a 387.5 km section of the Tōhoku Shinkansen).[7] Test runs have reached 443 km/h (275 mph) for conventional rail in 1996, and up to a world record 603 km/h (375 mph) for SCMaglev trains in April 2015.[8] The original Tōkaidō Shinkansen, connecting Tokyo, Nagoya and Osaka, three of Japan's largest cities, is one of the world's busiest high-speed rail lines. -

The Tampa to Orlando High-Speed Rail Project: Florida Taxpayer Risk Assessment by Wendell Cox Project Director: Robert W
Reason Foundation Policy Brief 95 January 2011 The Tampa to Orlando High-Speed Rail Project: Florida Taxpayer Risk Assessment by Wendell Cox Project Director: Robert W. Poole, Jr. Reason Foundation Reason Foundation’s mission is to advance a free society by developing, applying and promoting libertarian principles, including individual liberty, free markets and the rule of law. We use journalism and public policy research to influence the frameworks and actions of policymakers, journalists and opinion leaders. Reason Foundation’s nonpartisan public policy research promotes choice, competition and a dynamic market economy as the foundation for human dignity and progress. Reason produces rigorous, peer-reviewed research and directly engages the policy process, seeking strategies that emphasize cooperation, flexibility, local knowledge and results. Through practical and innovative approaches to complex problems, Reason seeks to change the way people think about issues, and promote policies that allow and encourage individu- als and voluntary institutions to flourish. Reason Foundation is a tax-exempt research and education organization as defined under IRS code 501(c) (3). Reason Foundation is supported by voluntary contributions from individuals, foundations and corpora- tions. The views are those of the author, not necessarily those of Reason Foundation or its trustees. While the authors of this study and Reason Foundation may hold some differing views about the proper role of govern- ment in society, Reason Foundation believes this study offers valuable policy analysis and recommendations. Copyright © 2011 Reason Foundation. All rights reserved. Reason Foundation Table of Contents Introduction ................................................................................................................ 1 The Tampa To Orlando High-Speed Rail Project ......................................................... 2 The Risk To Florida Taxpayers .................................................................................... -
Access Rail Projects in the Middle East
www.terrapinn.com/merail2013 Access rail projects in the Middle East 5 – 7 February 2013 created by Dubai International Convention and Exhibition Centre Dubai, UAE title sponsor platinum sponsors gold sponsors 10 reasons you should attend 1 Learn how to build futuristic, world class railway lines from global experts. 2 Discover how to run a customer centric, efficient metro and get the public to move from road to rail. Find out how the region’s biggest decision makers plan to design and operate 3 the GCC network. Become the partner of choice for upcoming tenders by meeting all the 4 region's operators with our unparalleled networking opportunities. Debate how regional freight operators will optimise their lines and attract top 5 tier clients. Discover how to run an efficient and safe railway network using the latest 6 signalling and telecommunications technology. Hear from international experts on how the Middle East can maximise the 7 potential for high speed rail. With over $156bn being invested into Middle East rail projects over the next decade attending Middle East Rail will give you access to the world’s fastest developing rail Learn how to build an intermodal business model which spearheads 8 economic growth industry. 9 Find out how to plan and operate a successful high speed rail line Whether you are a contractor, rail operator, transport authority or stock provider, you cannot afford to miss this opportunity to learn how the Middle East intends to 10 Join over 1500 visitors and enjoy 3 conference days, 5 free seminar theatres change the face of its transport industry. -

How Subways and High Speed Railways Have Changed Taiwan: Transportation Technology, Urban Culture, and Social Life
City University of New York (CUNY) CUNY Academic Works Publications and Research John Jay College of Criminal Justice 2010 How Subways and High Speed Railways Have Changed Taiwan: Transportation Technology, Urban Culture, and Social Life Anru LEE CUNY John Jay College of Criminal Justice How does access to this work benefit ou?y Let us know! More information about this work at: https://academicworks.cuny.edu/jj_pubs/54 Discover additional works at: https://academicworks.cuny.edu This work is made publicly available by the City University of New York (CUNY). Contact: [email protected] 1 How to Cite: Lee, Anru, and Chien-hung Tung. 2010. “How Subways and High Speed Railways Have Changed Taiwan: Transportation Technology, Urban Culture, and Social Life.” In Marc Moskowitz (ed.) Popular Culture in Taiwan: Charismatic Modernity. Pp. 107-130. London and New York: Routledge. 2 How Subways and High Speed Railways Have Changed Taiwan: Transportation Technology, Urban Culture, and Social Life Anru Lee Chien-hung Tung Department of Anthropology Graduate Institute of Rural Planning John Jay College of Criminal Justice National Chung Hsing University The City University of New York Taiwan It is 7:20 on a Tuesday morning.1 Mr Yan starts from his residence in Shi-lin, one of the districts of Taipei City (the capital city and financial-cultural center of Taiwan, located in the north of the country), walking towards the closest Taipei Mass Rapid Transit (TMRT) station. As the executive director of a major cultural research and consulting firm based in Taipei, he has to be at the Municipal Building of Kaohsiung City (the second largest city and hub of heavy industries of Taiwan—and a world-class port—located in the south of the country) at 10:30 a.m. -

High Speed Rail Taiwan
CASE STUDY Transportation ● TETRA ● Taiwan High Speed Rail High Speed Rail Taiwan A high-speed rail network that commenced operations in January 2007, connecting the cities of Taipei and Kaohsiung. Taiwan High Speed Rail gets up to speed with Motorola TETRA system. BACKGROUND Taiwan’s reputation as an Asian dragon sums up the country’s affluence and BENEFITS economic success. The rise in living standards has also generated higher expectations from the community. For the transportation industry, commuter Better coordination of facilities expectations for better transportation now go beyond safety and efficiency to results in: include comfort. The country’s transport planners realised early that its • Increased productivity railways were a vital economic lifeline that had to be upgraded. The rail Dispatchers and train service CUSTOMER NEEDS industry had to be ‘brought up to speed’ to play an integral role in the controllers are able to better co-ordinate and monitor country’s national development. passenger train fleets and • Seamless voice and data maintenance personnel and services. equipment. This results in a For the first time, Taiwan High Speed Rail made it possible for commuters higher level of efficiency that • Clear and reliable to travel in comfort between the cities of Taipei and Kaohsiung in roughly 90 in turn increases productivity. communications when trains minutes. As a result of this significant reduction in traveling time, the cities in are running at high speed. • Greater operational efficiency the western corridor of Taiwan became a one-day community. The integration of a • Enhanced communication computer-aided dispatch reliability and clarity for Key to operational efficiency in rail transportation was the transport system and failure monitoring better control and means that dispatch management of daily operator’s communications system. -
High-Speed Rail: Public, Private Or Both? Assessing the Prospects, Promise and Pitfalls of Public-Private Partnerships High-Speed Rail
High-Speed Rail: Public, Private or Both? Assessing the Prospects, Promise and Pitfalls of Public-Private Partnerships High-Speed Rail: Public, Private or Both? Assessing the Prospects, Promise and Pitfalls of Public-Private Partnerships U.S. PIRG Education Fund Tony Dutzik and Jordan Schneider, Frontier Group Phineas Baxandall, U.S. PIRG Education Fund Summer 2011 Acknowledgments The authors thank Michael Likosky, senior fellow at the Institute for Public Knowledge at New York University, Elliot Sclar, professor of urban planning at Columbia University, and Yonah Freemark of the Transport Politic for their review of this report. Thanks also to Carolyn Kramer for her editorial assistance. U.S. PIRG Education Fund thanks the Rockefeller Foundation and the Ford Foundation for making this report possible. The authors bear responsibility for any factual errors. The recommendations are those of U.S. PIRG Education Fund. The views expressed in this report are those of the authors and do not necessarily reflect the views of our funders or those who provided review. Copyright 2011 U.S. PIRG Education Fund With public debate around important issues often dominated by special interests pursuing their own narrow agendas, U.S. PIRG Education Fund offers an independent voice that works on behalf of the public interest. U.S. PIRG Education Fund, a 501(c)(3) organiza- tion, works to protect consumers and promote good government. We investigate problems, craft solutions, educate the public, and offer Americans meaningful opportunities for civic participation. For more information about U.S.PIRG Education Fund or for additional copies of this report, please visit www.uspirg.org/edfund. -

Le-Mode-Le-Asiatique.Pdf
« Le cas de l’Asie montre qu’il n’existe aucune raison valable pour que l’Afrique reste pauvre » ALIKO DANCOTE, FONDATEUR DU CONGLOMÉRAT DANGOTE GROUP LE MODÈLE ASIATIQUE Pourquoi l’Afrique devrait s’inspirer de l’Asie, et ce qu’elle ne devrait pas faire GREG MILLS, OLUSEGUN OBASANJO, HAILEMARIAM DESALEGN ET EMILY VAN DER MERWE « Excellent produit, résultat d’un très gros travail et d’une grande perspicacité. » Joe Studwell, auteur, How Asia Works « Ce livre explique comment l’Afrique peut imiter les meilleurs moments du parcours de l’Asie pour passer de la pauvreté à la prospérité, et comment elle peut en éviter les pires. » Président Ernest Bai Koroma « Une fenêtre instructive pour l’Asie sur l’Afrique ; pour les Africains, l’histoire point par point du développement en Asie. » Shu Zhan, Directeur de recherche et Directeur du Centre d’Études Africaines, Fondation de Chine pour les Études internationales « L’Afrique devrait faire une meilleure utilisation de l’aide – et éviter la souffrance causée par les mauvais choix de politiques. Ces leçons – et bien plus encore – sont le devant et le centre du Modèle asiatique. » Jordan Ryan, ancien Directeur du Programme des Nations Unies pour le Développement au Vietnam, et Représentant Spécial Adjoint pour le Libéria « Un autre volume remarquable de l’équipe d’hommes d’État-analystes distingués de Brenthurst, qui offrent des perspectives sur les réussites du développement économique et social de l’Asie et en tirent des leçons essentielles pour l’Afrique. Il offre à l’Afrique des choix clairs sur comment devenir la prochaine Asie tout en évitant ses erreurs. -

High-Speed Europe, a Sustainable Link Between Citizens
High-speed Europe A SUSTAINABLE LINK BETWEEN CITIZENS This brochure is based largely on ‘European high-speed rail – An easy way to connect’, a study into the development and future prospects of the high-speed trans-European rail network. This study, which was commissioned by the European Commission, was completed in March 2009 by MVV Consulting and Tractebel Engineering. Europe Direct is a service to help you find answers to your questions about the European Union. Freephone number (*): 00 800 6 7 8 9 10 11 (*) Certain mobile telephone operators do not allow access to 00 800 numbers or these calls may be billed. More information on the European Union is available on the Internet (http://europa.eu). Cataloguing data can be found at the end of this publication. Luxembourg: Publications Office of the European Union, 2010 ISBN 978-92-79-13620-7 doi: 10.2768/17821 © European Union, 2010 Reproduction is authorised provided the source is acknowledged. Cover photo: © Eurostar Group Ltd Photos courtesy of: Adif, Eurostar Group Ltd, Ferrovie dello stato, iStockphoto, Reporters, Shutterstock, European Union Printed in Belgium PRINTED ON WHITE CHLORINE-FREE PAPER PREFACE The European Union is committed to making the transport of goods and the mobility of people more secure, more efficient and more environmentally friendly, with priority given to social and territorial cohesion, as well as to economic dynamism. Looking ahead to the near future, I envisage a transport system that closely meets the needs of its users, that is fast and intelligent but that minimises its environmental impact. The use of high-speed trains shows how this vision for the future can be made a reality today, thanks to the combined efforts of the Member States, partners from the industry and the financial support from the Union. -

A Two-Layer Optimization Model for High-Speed Railway Line Planning*
902 Wang et al. / J Zhejiang Univ-Sci A (Appl Phys & Eng) 2011 12(12):902-912 Journal of Zhejiang University-SCIENCE A (Applied Physics & Engineering) ISSN 1673-565X (Print); ISSN 1862-1775 (Online) www.zju.edu.cn/jzus; www.springerlink.com E-mail: [email protected] A two-layer optimization model for high-speed railway line planning* Li WANG†, Li-min JIA†, Yong QIN†‡, Jie XU, Wen-ting MO (State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, Beijing 100044, China) †E-mail: [email protected]; [email protected]; [email protected] Received Sept. 23, 2011; Revision accepted Sept. 23, 2011; Crosschecked Sept. 26, 2011 Abstract: Line planning is the first important strategic element in the railway operation planning process, which will directly affect the successive planning to determine the efficiency of the whole railway system. A two-layer optimization model is pro- posed within a simulation framework to deal with the high-speed railway (HSR) line planning problem. In the model, the top layer aims at achieving an optimal stop-schedule set with the service frequencies, and is formulated as a nonlinear program, solved by genetic algorithm. The objective of top layer is to minimize the total operation cost and unserved passenger volume. Given a specific stop-schedule, the bottom layer focuses on weighted passenger flow assignment, formulated as a mixed integer program with the objective of maximizing the served passenger volume and minimizing the total travel time for all passengers. The case study on Taiwan HSR shows that the proposed two-layer model is better than the existing techniques. -

Go Extra Mile Taiwan High Speed Rail Corporate Social Responsibility
Go Extra Mile 2018台灣高鐵企業社會責任報告書 Taiwan2018 High Speed Rail Corporate Social Responsibility Report Be真實接觸 There Be There Table of Contents 02 About this Report 06 Material Topics and Stakeholders 11 About Taiwan High Speed Rail Corporation 03 Letter from the Chairman 06 Identification of Stakeholders 12 Operating Bases and Services 04 Letter from the President 06 Identification and Responses to Material Topics 13 Sustainability Strategies and Goals 05 Performance Highlights for 2018 16 Operational Performance and Sustainable Practices 18 27 33 41 Transportation Technology Taiwan Touch —Professional Transportation —Innovative Technology —Enhancing Local Connection —Sustainable Care 19 Safety Services and Responsible 28 Quality Services and Intelligent 34 Glide through Taiwan and Stretch 43 Sustainable Governance and Ethical Transportation Transportation Global Wide Corporate Management 22 Disaster Prevention and 30 Convenience, Attentiveness and 37 Partner Relationship Management 46 Low-Carbon Train Operation and Professional Response Maintaining Relationships and Local Supply Environmental Sustainability 25 Smooth Travel in Adherence 53 Nurturing Talent and Value Cultivation to Commitment 56 Protection of Rights and Considerate Care 59 Carrying for Society and Developing Local Area 63 Appendices 68 Opinion Statement 69 GRI Index About this Report About this Report Letter from the Chairman In 2009, Taiwan High Speed Rail Corporation (hereinafter referred to as “THSRC”) released the first ever “THSRC Corporate Social Responsibility Letter from the President White Paper” to disclose its performance and actions in social responsibility. In response to international trends and compliance with non-financial information disclosure standards in Taiwan, the report has been renamed as “THSRC Corporate Social Responsibility Report” since 2015. This report Performance Highlights for 2018 is the sixth Corporate Social Responsibility (CSR) Report published by THSRC.