Parallels in Hyperbolic Geometry
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Geometry Notes G.2 Parallel Lines, Transversals, Angles Mrs. Grieser Name: Date
Geometry Notes G.2 Parallel Lines, Transversals, Angles Mrs. Grieser Name: ________________________________________ Date: ______________ Block: ________ Identifying Pairs of Lines and Angles Lines that intersect are coplanar Lines that do not intersect o are parallel (coplanar) OR o are skew (not coplanar) In the figure, name: o intersecting lines:___________ o parallel lines:_______________ o skew lines:________________ o parallel planes:_____________ Example: Think of each segment in the figure as part of a line. Find: Line(s) parallel to CD and containing point A _________ Line(s) skew to and containing point A _________ Line(s) perpendicular to and containing point A _________ Plane(s) parallel to plane EFG and containing point A _________ Parallel and Perpendicular Lines If two lines are in the same plane, then they are either parallel or intersect a point. There exist how many lines through a point not on a line? __________ Only __________ of them is parallel to the line. Parallel Postulate If there is a line and a point not on a line, then there is exactly one line through the point parallel to the given line. Perpendicular Postulate If there is a line and a point not on a line, then there is exactly one line through the point parallel to the given line. Angles and Transversals Interior angles are on the INSIDE of the two lines Exterior angles are on the OUTSIDE of the two lines Alternate angles are on EITHER SIDE of the transversal Consecutive angles are on the SAME SIDE of the transversal Corresponding angles are in the same position on each of the two lines Alternate interior angles lie on either side of the transversal inside the two lines Alternate exterior angles lie on either side of the transversal outside the two lines Consecutive interior angles lie on the same side of the transversal inside the two lines (same side interior) Geometry Notes G.2 Parallel Lines, Transversals, Angles Mrs. -

Proofs with Perpendicular Lines
3.4 Proofs with Perpendicular Lines EEssentialssential QQuestionuestion What conjectures can you make about perpendicular lines? Writing Conjectures Work with a partner. Fold a piece of paper D in half twice. Label points on the two creases, as shown. a. Write a conjecture about AB— and CD — . Justify your conjecture. b. Write a conjecture about AO— and OB — . AOB Justify your conjecture. C Exploring a Segment Bisector Work with a partner. Fold and crease a piece A of paper, as shown. Label the ends of the crease as A and B. a. Fold the paper again so that point A coincides with point B. Crease the paper on that fold. b. Unfold the paper and examine the four angles formed by the two creases. What can you conclude about the four angles? B Writing a Conjecture CONSTRUCTING Work with a partner. VIABLE a. Draw AB — , as shown. A ARGUMENTS b. Draw an arc with center A on each To be prof cient in math, side of AB — . Using the same compass you need to make setting, draw an arc with center B conjectures and build a on each side of AB— . Label the C O D logical progression of intersections of the arcs C and D. statements to explore the c. Draw CD — . Label its intersection truth of your conjectures. — with AB as O. Write a conjecture B about the resulting diagram. Justify your conjecture. CCommunicateommunicate YourYour AnswerAnswer 4. What conjectures can you make about perpendicular lines? 5. In Exploration 3, f nd AO and OB when AB = 4 units. -

Molecular Symmetry
Molecular Symmetry Symmetry helps us understand molecular structure, some chemical properties, and characteristics of physical properties (spectroscopy) – used with group theory to predict vibrational spectra for the identification of molecular shape, and as a tool for understanding electronic structure and bonding. Symmetrical : implies the species possesses a number of indistinguishable configurations. 1 Group Theory : mathematical treatment of symmetry. symmetry operation – an operation performed on an object which leaves it in a configuration that is indistinguishable from, and superimposable on, the original configuration. symmetry elements – the points, lines, or planes to which a symmetry operation is carried out. Element Operation Symbol Identity Identity E Symmetry plane Reflection in the plane σ Inversion center Inversion of a point x,y,z to -x,-y,-z i Proper axis Rotation by (360/n)° Cn 1. Rotation by (360/n)° Improper axis S 2. Reflection in plane perpendicular to rotation axis n Proper axes of rotation (C n) Rotation with respect to a line (axis of rotation). •Cn is a rotation of (360/n)°. •C2 = 180° rotation, C 3 = 120° rotation, C 4 = 90° rotation, C 5 = 72° rotation, C 6 = 60° rotation… •Each rotation brings you to an indistinguishable state from the original. However, rotation by 90° about the same axis does not give back the identical molecule. XeF 4 is square planar. Therefore H 2O does NOT possess It has four different C 2 axes. a C 4 symmetry axis. A C 4 axis out of the page is called the principle axis because it has the largest n . By convention, the principle axis is in the z-direction 2 3 Reflection through a planes of symmetry (mirror plane) If reflection of all parts of a molecule through a plane produced an indistinguishable configuration, the symmetry element is called a mirror plane or plane of symmetry . -
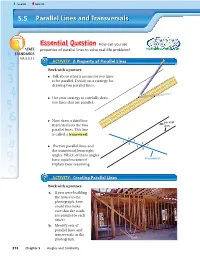
Parallel Lines and Transversals
5.5 Parallel Lines and Transversals How can you use STATES properties of parallel lines to solve real-life problems? STANDARDS MA.8.G.2.2 1 ACTIVITY: A Property of Parallel Lines Work with a partner. ● Talk about what it means for two lines 12 1 cm 56789 to be parallel. Decide on a strategy for 1234 drawing two parallel lines. 01 91 8 9 9 9 9 10 11 12 13 10 10 10 10 ● Use your strategy to carefully draw 7 67 two lines that are parallel. 14 15 5 16 17 18 19 20 3421 22 23 2 24 25 26 1 ● Now, draw a third line 27 28 in. parallel that intersects the two 29 30 lines parallel lines. This line is called a transversal. 2 1 3 4 6 ● The two parallel lines and 5 7 8 the transversal form eight angles. Which of these angles have equal measures? transversal Explain your reasoning. 2 ACTIVITY: Creating Parallel Lines Work with a partner. a. If you were building the house in the photograph, how could you make sure that the studs are parallel to each other? b. Identify sets of parallel lines and transversals in the Studs photograph. 212 Chapter 5 Angles and Similarity 3 ACTIVITY: Indirect Measurement Work with a partner. F a. Use the fact that two rays from the Sun are parallel to explain why △ABC and △DEF are similar. b. Explain how to use similar triangles to fi nd the height of the fl agpole. x ft Sun’s ray C Sun’s ray 5 ft AB3 ft DE36 ft 4. -
Triangles and Transversals Triangles
Triangles and Transversals Triangles A three-sided polygon. Symbol → ▵ You name it ▵ ABC. Total Angle Sum of a Triangle The interior angles of a triangle add up to 180 degrees. Symbol = Acute Triangle A triangle that contains only angles that are less than 90 degrees. Obtuse Triangle A triangle with one angle greater than 90 degrees (an obtuse angle). Right Triangle A triangle with one right angle (90 degrees). Vertex The common endpoint of two or more rays or line segments. Complementary Angles Two angles whose measures have a sum of 90 degrees. Supplementary Angles Two angles whose measures have a sum of 180 degrees. Perpendicular Lines Lines that intersect to form a right angle (90 degrees). Symbol = Parallel Lines Lines that never intersect. Arrows are used to indicate lines are parallel. Symbol = || Transversal Lines A line that cuts across two or more (usually parallel) lines. Intersect The point where two lines meet or cross. Vertical Angles Angles opposite one another at the intersection of two lines. Vertical angles have the same angle measurements. Interior Angles An angle inside a shape. Exterior Angles Angles outside of a shape. Alternate Interior Angles The pairs of angles on opposite sides of the transversal but inside the two lines. Alternate Exterior Angles Each pair of these angles are outside the lines, and on opposite sides of the transversal. Corresponding Angles The angles in matching corners. Reflexive Angles An angle whose measure is greater than 180 degrees and less that 360 degrees. Straight Angles An angle that measures exactly 180 degrees. Adjacent Angles Angles with common side and common vertex without overlapping. -

Understand the Principles and Properties of Axiomatic (Synthetic
Michael Bonomi Understand the principles and properties of axiomatic (synthetic) geometries (0016) Euclidean Geometry: To understand this part of the CST I decided to start off with the geometry we know the most and that is Euclidean: − Euclidean geometry is a geometry that is based on axioms and postulates − Axioms are accepted assumptions without proofs − In Euclidean geometry there are 5 axioms which the rest of geometry is based on − Everybody had no problems with them except for the 5 axiom the parallel postulate − This axiom was that there is only one unique line through a point that is parallel to another line − Most of the geometry can be proven without the parallel postulate − If you do not assume this postulate, then you can only prove that the angle measurements of right triangle are ≤ 180° Hyperbolic Geometry: − We will look at the Poincare model − This model consists of points on the interior of a circle with a radius of one − The lines consist of arcs and intersect our circle at 90° − Angles are defined by angles between the tangent lines drawn between the curves at the point of intersection − If two lines do not intersect within the circle, then they are parallel − Two points on a line in hyperbolic geometry is a line segment − The angle measure of a triangle in hyperbolic geometry < 180° Projective Geometry: − This is the geometry that deals with projecting images from one plane to another this can be like projecting a shadow − This picture shows the basics of Projective geometry − The geometry does not preserve length -

Parallel Lines Cut by a Transversal
Parallel Lines Cut by a Transversal I. UNIT OVERVIEW & PURPOSE: The goal of this unit is for students to understand the angle theorems related to parallel lines. This is important not only for the mathematics course, but also in connection to the real world as parallel lines are used in designing buildings, airport runways, roads, railroad tracks, bridges, and so much more. Students will work cooperatively in groups to apply the angle theorems to prove lines parallel, to practice geometric proof and discover the connections to other topics including relationships with triangles and geometric constructions. II. UNIT AUTHOR: Darlene Walstrum Patrick Henry High School Roanoke City Public Schools III. COURSE: Mathematical Modeling: Capstone Course IV. CONTENT STRAND: Geometry V. OBJECTIVES: 1. Using prior knowledge of the properties of parallel lines, students will identify and use angles formed by two parallel lines and a transversal. These will include alternate interior angles, alternate exterior angles, vertical angles, corresponding angles, same side interior angles, same side exterior angles, and linear pairs. 2. Using the properties of these angles, students will determine whether two lines are parallel. 3. Students will verify parallelism using both algebraic and coordinate methods. 4. Students will practice geometric proof. 5. Students will use constructions to model knowledge of parallel lines cut by a transversal. These will include the following constructions: parallel lines, perpendicular bisector, and equilateral triangle. 6. Students will work cooperatively in groups of 2 or 3. VI. MATHEMATICS PERFORMANCE EXPECTATION(s): MPE.32 The student will use the relationships between angles formed by two lines cut by a transversal to a) determine whether two lines are parallel; b) verify the parallelism, using algebraic and coordinate methods as well as deductive proofs; and c) solve real-world problems involving angles formed when parallel lines are cut by a transversal. -

Geometry: Neutral MATH 3120, Spring 2016 Many Theorems of Geometry Are True Regardless of Which Parallel Postulate Is Used
Geometry: Neutral MATH 3120, Spring 2016 Many theorems of geometry are true regardless of which parallel postulate is used. A neutral geom- etry is one in which no parallel postulate exists, and the theorems of a netural geometry are true for Euclidean and (most) non-Euclidean geomteries. Spherical geometry is a special case of Non-Euclidean geometries where the great circles on the sphere are lines. This leads to spherical trigonometry where triangles have angle measure sums greater than 180◦. While this is a non-Euclidean geometry, spherical geometry develops along a separate path where the axioms and theorems of neutral geometry do not typically apply. The axioms and theorems of netural geometry apply to Euclidean and hyperbolic geometries. The theorems below can be proven using the SMSG axioms 1 through 15. In the SMSG axiom list, Axiom 16 is the Euclidean parallel postulate. A neutral geometry assumes only the first 15 axioms of the SMSG set. Notes on notation: The SMSG axioms refer to the length or measure of line segments and the measure of angles. Thus, we will use the notation AB to describe a line segment and AB to denote its length −−! −! or measure. We refer to the angle formed by AB and AC as \BAC (with vertex A) and denote its measure as m\BAC. 1 Lines and Angles Definitions: Congruence • Segments and Angles. Two segments (or angles) are congruent if and only if their measures are equal. • Polygons. Two polygons are congruent if and only if there exists a one-to-one correspondence between their vertices such that all their corresponding sides (line sgements) and all their corre- sponding angles are congruent. -

Hyperbolic Geometry
Flavors of Geometry MSRI Publications Volume 31,1997 Hyperbolic Geometry JAMES W. CANNON, WILLIAM J. FLOYD, RICHARD KENYON, AND WALTER R. PARRY Contents 1. Introduction 59 2. The Origins of Hyperbolic Geometry 60 3. Why Call it Hyperbolic Geometry? 63 4. Understanding the One-Dimensional Case 65 5. Generalizing to Higher Dimensions 67 6. Rudiments of Riemannian Geometry 68 7. Five Models of Hyperbolic Space 69 8. Stereographic Projection 72 9. Geodesics 77 10. Isometries and Distances in the Hyperboloid Model 80 11. The Space at Infinity 84 12. The Geometric Classification of Isometries 84 13. Curious Facts about Hyperbolic Space 86 14. The Sixth Model 95 15. Why Study Hyperbolic Geometry? 98 16. When Does a Manifold Have a Hyperbolic Structure? 103 17. How to Get Analytic Coordinates at Infinity? 106 References 108 Index 110 1. Introduction Hyperbolic geometry was created in the first half of the nineteenth century in the midst of attempts to understand Euclid’s axiomatic basis for geometry. It is one type of non-Euclidean geometry, that is, a geometry that discards one of Euclid’s axioms. Einstein and Minkowski found in non-Euclidean geometry a This work was supported in part by The Geometry Center, University of Minnesota, an STC funded by NSF, DOE, and Minnesota Technology, Inc., by the Mathematical Sciences Research Institute, and by NSF research grants. 59 60 J. W. CANNON, W. J. FLOYD, R. KENYON, AND W. R. PARRY geometric basis for the understanding of physical time and space. In the early part of the twentieth century every serious student of mathematics and physics studied non-Euclidean geometry. -

Geometry by Its History
Undergraduate Texts in Mathematics Geometry by Its History Bearbeitet von Alexander Ostermann, Gerhard Wanner 1. Auflage 2012. Buch. xii, 440 S. Hardcover ISBN 978 3 642 29162 3 Format (B x L): 15,5 x 23,5 cm Gewicht: 836 g Weitere Fachgebiete > Mathematik > Geometrie > Elementare Geometrie: Allgemeines Zu Inhaltsverzeichnis schnell und portofrei erhältlich bei Die Online-Fachbuchhandlung beck-shop.de ist spezialisiert auf Fachbücher, insbesondere Recht, Steuern und Wirtschaft. Im Sortiment finden Sie alle Medien (Bücher, Zeitschriften, CDs, eBooks, etc.) aller Verlage. Ergänzt wird das Programm durch Services wie Neuerscheinungsdienst oder Zusammenstellungen von Büchern zu Sonderpreisen. Der Shop führt mehr als 8 Millionen Produkte. 2 The Elements of Euclid “At age eleven, I began Euclid, with my brother as my tutor. This was one of the greatest events of my life, as dazzling as first love. I had not imagined that there was anything as delicious in the world.” (B. Russell, quoted from K. Hoechsmann, Editorial, π in the Sky, Issue 9, Dec. 2005. A few paragraphs later K. H. added: An innocent look at a page of contemporary the- orems is no doubt less likely to evoke feelings of “first love”.) “At the age of 16, Abel’s genius suddenly became apparent. Mr. Holmbo¨e, then professor in his school, gave him private lessons. Having quickly absorbed the Elements, he went through the In- troductio and the Institutiones calculi differentialis and integralis of Euler. From here on, he progressed alone.” (Obituary for Abel by Crelle, J. Reine Angew. Math. 4 (1829) p. 402; transl. from the French) “The year 1868 must be characterised as [Sophus Lie’s] break- through year. -

Chapter 14 Hyperbolic Geometry Math 4520, Fall 2017
Chapter 14 Hyperbolic geometry Math 4520, Fall 2017 So far we have talked mostly about the incidence structure of points, lines and circles. But geometry is concerned about the metric, the way things are measured. We also mentioned in the beginning of the course about Euclid's Fifth Postulate. Can it be proven from the the other Euclidean axioms? This brings up the subject of hyperbolic geometry. In the hyperbolic plane the parallel postulate is false. If a proof in Euclidean geometry could be found that proved the parallel postulate from the others, then the same proof could be applied to the hyperbolic plane to show that the parallel postulate is true, a contradiction. The existence of the hyperbolic plane shows that the Fifth Postulate cannot be proven from the others. Assuming that Mathematics itself (or at least Euclidean geometry) is consistent, then there is no proof of the parallel postulate in Euclidean geometry. Our purpose in this chapter is to show that THE HYPERBOLIC PLANE EXISTS. 14.1 A quick history with commentary In the first half of the nineteenth century people began to realize that that a geometry with the Fifth postulate denied might exist. N. I. Lobachevski and J. Bolyai essentially devoted their lives to the study of hyperbolic geometry. They wrote books about hyperbolic geometry, and showed that there there were many strange properties that held. If you assumed that one of these strange properties did not hold in the geometry, then the Fifth postulate could be proved from the others. But this just amounted to replacing one axiom with another equivalent one. -

Math 1312 Sections 2.3 Proving Lines Parallel. Theorem 2.3.1: If Two Lines
Math 1312 Sections 2.3 Proving Lines Parallel. Theorem 2.3.1: If two lines are cut by a transversal so that the corresponding angles are congruent, then these lines are parallel. Example 1: If you are given a figure (see below) with congruent corresponding angles then the two lines cut by the transversal are parallel. Because each angle is 35 °, then we can state that a ll b. 35 ° a ° b 35 Theorem 2.3.2: If two lines are cut by a transversal so that the alternate interior angles are congruent, then these lines are parallel. Example 2: If you are given a pair of alternate interior angles that are congruent, then the two lines cut by the transversal are parallel. Below the two angles shown are congruent and they are alternate interior angles; therefore, we can say that a ll b. a 75 ° ° b 75 Theorem 2.3.3: If two lines are cut by a transversal so that the alternate exterior angles are congruent, then these lines are parallel. Example 3: If you are given a pair of alternate exterior angles that are congruent, then the two lines cut by the transversal are parallel. For example, the alternate exterior angles below are each 105 °, so we can say that a ll b. 105 ° a b 105 ° Theorem 2.3.4: If two lines are cut by a transversal so that the interior angles on one side of the transversal are supplementary, then these lines are parallel. Example 3: If you are given a pair of consecutive interior angles that add up to 180 °(i.e.