A Stochastic Metapopulation Model with Variability in Patch Size and Position
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Two Colonisation Stages Generate Two Different Patterns of Genetic Diversity Within Native and Invasive Ranges of Ulex Europaeus
Heredity (2013) 111, 355–363 & 2013 Macmillan Publishers Limited All rights reserved 0018-067X/13 www.nature.com/hdy ORIGINAL ARTICLE Two colonisation stages generate two different patterns of genetic diversity within native and invasive ranges of Ulex europaeus B Hornoy1,3, A Atlan1, V Roussel1,4, YM Buckley2 and M Tarayre1 Genetic diversity and the way a species is introduced influence the capacity of populations of invasive species to persist in, and adapt to, their new environment. The diversity of introduced populations affects their evolutionary potential, which is particularly important for species that have invaded a wide range of habitats and climates, such as European gorse, Ulex europaeus. This species originated in the Iberian peninsula and colonised Europe in the Neolithic; over the course of the past two centuries it was introduced to, and has become invasive in, other continents. We characterised neutral genetic diversity and its structure in the native range and in invaded regions. By coupling these results with historical data, we have identified the way in which gorse populations were introduced and the consequences of introduction history on genetic diversity. Our study is based on the genotyping of individuals from 18 populations at six microsatellite loci. As U. europaeus is an allohexaploid species, we used recently developed tools that take into account genotypic ambiguity. Our results show that genetic diversity in gorse is very high and mainly contained within populations. We confirm that colonisation occurred in two stages. During the first stage, gorse spread out naturally from Spain towards northern Europe, losing some genetic diversity. During the second stage, gorse was introduced by humans into different regions of the world, from northern Europe. -

Re-Thinking Impacts of Island Colonisation
Kerry-Anne Mairs (2007) Islands and human impact... University of Edinburgh, Unpublished PhD Thesis. 398 pp. Chapter 3: Island contexts Chapter 3 Island contexts Introduction Perhaps the thing that most distinguishes islands, at least oceanic islands… is their extreme vulnerability or susceptibility to disturbance (Fosberg 1963: 559). This chapter examines the wider context of island research as introduced in the framework in Figure 1.5 with regards to the notion that islands represent a model system, from which globally occurring processes can be understood. The chapter aims to provide a brief overview of islands and what characterises them, both as islands, and as locations from which to explore human-environment interactions. Recent examples of human-environment research in some Pacific islands, where wide ranging archaeological and comparative-led research has been carried out, are also reviewed. From this research, hypotheses regarding human impacts on environments can be developed with regards to the Faroe Islands. Island contexts as models for human impact and global change The smaller, more manageable spatial scale and insularity of island environments and societies, has made islands (particularly remote islands) popular field locations for research in a variety of disciplines, including biology, ecology, biogeography, ethnography and more recently, environmental archaeology. Islands have been referred to as outdoor laboratories (Kirch 1997a, Fitzhugh and Hunt 1997), where human-environment research can be approached from a comparative -

The Great White Egret in Europe: Population Increase and Range Expansion Since 1980 Łukasz Ławicki
The Great White Egret in Europe: population increase and range expansion since 1980 Łukasz Ławicki Abstract The European breeding and non-breeding populations of the Great White Egret Ardea alba have increased dramatically since 1980. During this period the breeding range has expanded to the north and west, and the species has nested for the first time in 13 countries, including Sweden and England. Since 2000 there has also been a substantial increase in the wintering populations in western and central Europe, where it formerly wintered in small numbers or only occasionally, with flocks of several hundred individuals reported from some countries. Changes in the availability of foraging habitat and food, the cessation of persecution and related human-induced mortality, improved legal protection, and climate change have probably all played a part in the patterns described here. The feathers of the male are much sought after as decorations, which in the East are a sign of great dignity and highly prized; formerly they were used in Europe as ornamentation by knights and the fair sex. (Taczanowski 1882) he Great White Egret Ardea alba is a Historical status and distribution cosmopolitan species, found on all It seems likely that Great White Egrets were Tcontinents except Antarctica in a common in central Europe in the past. In variety of wetland habitats where food (espe - Poland, for example, they were commonly cially fish) is available: marshes, river flood - hunted using Saker Falcons Falco cherrug plains, the margins of lakes, ponds and (Stajszczyk 2011). Historically, a core area of reservoirs, coasts, estuaries and mangrove the population was probably present-day thickets (Voisin 1991; Kushlan & Hancock Ukraine and Hungary. -

Local Extinction and Colonisation in Native and Exotic Fish in Relation to Changes in Land
Local extinction and colonisation in native and exotic fish in relation to changes in land use Dorothée Kopp, Jordi Figuerola, Arthur Compin, Frédéric Santoul, Régis Céréghino To cite this version: Dorothée Kopp, Jordi Figuerola, Arthur Compin, Frédéric Santoul, Régis Céréghino. Local extinction and colonisation in native and exotic fish in relation to changes in land use. Marine and Freshwater Research, CSIRO Publishing, 2011, vol. 63, pp. 175-179. 10.1071/MF11142. hal-00913592 HAL Id: hal-00913592 https://hal.archives-ouvertes.fr/hal-00913592 Submitted on 4 Dec 2013 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Open Archive TOULOUSE Archive Ouverte (OATAO) OATAO is an open access repository that collects the work of Toulouse researchers and makes it freely available over the web where possible. This is an author-deposited version published in : http://oatao.univ-toulouse.fr/ Eprints ID : 10194 To link to this article : DOI:10.1071/MF11142 URL : http://dx.doi.org/10.1071/MF11142 To cite this version : Kopp, Dorothée and Figuerola, Jordi and Compin, Arthur and Santoul, Frédéric and Céréghino, Régis. Local extinction and colonisation in native and exotic fish in relation to changes in land use. -
OUTLINE for THIS WEEK Lec 11 – 13 METAPOPULATIONS Concept --> Simple Model Spatially Realistic Metapopulation Models De
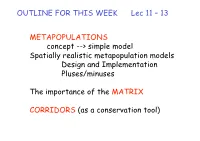
OUTLINE FOR THIS WEEK Lec 11 – 13 METAPOPULATIONS concept --> simple model Spatially realistic metapopulation models Design and Implementation Pluses/minuses The importance of the MATRIX CORRIDORS (as a conservation tool) THE BASICS Levins 1970 - first used term metapopulation “a population of populations” a group of local populations that are linked by immigration and emigration Approach Model population persistence NOT population size Local populations are reduced to two values 0 local extinction, 1 local persistence Metapopulation operates at a larger spatial scale examines proportion of patches that are occupied The classical metapopulation All patches are the same No spatial structure Large number of patches time Change is due to Extinction and Colonization Metapopulations are buffered by rescue effects or recolonisation after local extinction Modelling the classical metapopulation Extinctions = extinction rate x prop’n patches occupied = e.p Colonization = colonization rate x prop’n unoccupied patches = cp. (1-p) E C 0 1 p 0 p 1 At EQUILIBRIUM Extinction = Colonization ep = cp (1-p) Q. What influences P*= 1- e/c Extinction Graphically Colonization C or E 0 p 1 Classical metapulations and habitat loss Loss of a patch Reduced patch size --> a reduced colonization rate !increased! extinction !reduced! colonization 0 1 Pnew Porig 0 1 P Pnew orig The classical metapopulation model is UNREALISTIC all patches are the same size all patches are equally connected BUT patches in nature vary in size and isolation Spatially realistic metapopulation -

Evidence for Colonisation of Anthropogenic Habitats by the Réunion Day Gecko Phelsuma Borbonica (Mertens, 1966) (Réunion Island, France): Conservation Implications
Herpetology Notes, volume 10: 563-571 (2017) (published online on 18 October 2017) Evidence for colonisation of anthropogenic habitats by the Réunion day gecko Phelsuma borbonica (Mertens, 1966) (Réunion Island, France): conservation implications Stéphane Augros1,*, Lisa Faipoux2, Manon Bodin2, Arnaud Le Goff1, Mickaël Sanchez3 and Johanna Clémencet2 Abstract. Réunion Island landscapes are today characterised by a complex mosaic of ecosystems in varying degrees of alteration. Changes in natural areas result in hybrid ecosystems, retaining some original characteristics (e.g. native species) as well as novel elements (e.g. introduced species). Previous studies demonstrate that substantially modified areas could represent valuable habitats for some species of Phelsuma. Here, we examine a population of the Réunion day gecko, Phelsuma borbonica, in habitats characterised by different degrees of human influence to improve the understanding of the distribution of this species outside its native area. Distribution, edge effect, artificial structure attractiveness and degree of habitats alteration were quantified with four distinct protocols. We found that availability of egg laying sites, and edge effect should be considered as potential drivers to explain the species observed distribution within highly disturbed areas dominated by introduced plant species and scattered with artificial structures. Consequently, anthropogenic habitats must be seen in certain cases as areas of importance for the endangered P. borbonica. Because hybridecosystems -
Potential Effects of Habitat Fragmentation on Wild Animal Welfare
Potential effects of habitat fragmentation on wild animal welfare Matthew Allcock1,3 and Luke Hecht2,3,* 1 School of Mathematics and Statistics, University of Sheffield, Hounsfield Road, Sheffield S3 7RH, UK 2 Department of Biosciences, Durham University, Stockton Road, Durham DH1 3LE, UK 3 Animal Ethics, 4200 Park Blvd. #129, Oakland, CA 94602, USA *to whom correspondence should be addressed: [email protected] 1. Introduction The habitats of wild animals change in significant ways, attributable to both anthropogenic and naturogenic causes. Habitat changes affect the welfare of inhabiting populations directly, such as by decreasing the available food, and indirectly, such as by adjusting the evolutionary fitness of behavioral and physical traits that affect the welfare of the animals who express them. While by no means simple, estimating the direct welfare effects of habitat changes, which often occur over a short timescale, seems tractable. The same cannot yet be said for the indirect effects, which are dominated by long-term considerations and can be chaotic due to the immense complexity of natural ecosystems. In terms of wild animal welfare, it is plausible that the indirect effects of habitat change dominate the direct effects because they occur over many generations, affecting many more individuals. Accounting for such long-term impacts is a crucial objective and challenge for those who advocate for research and stewardship of wild animal welfare (e.g. Ng, 2016; Beausoleil et al. 2018; Waldhorn, 2019; Capozzelli et al. 2020). Despite the seemingly lower tractability of predicting long-term and indirect effects, we must consider all impacts of actions to improve wild animal welfare. -

1 1 Colonisation and Extinction Dynamics of a Declining Migratory Bird Are Influenced by 2 Climate Change and Habitat Degradatio
1 Running head: colonisation-extinction under climate and habitat change 2 Colonisation and extinction dynamics of a declining migratory bird are influenced by 3 climate change and habitat degradation 4 5 KAREN MUSTIN,1, 2* ARJUN AMAR3, 4 and STEPHEN M. REDPATH5 6 7 1IBES, University of Aberdeen, Zoology Building, Tillydrone Avenue, Aberdeen, AB24 2TZ, 8 UK 9 2The Ecology Centre, School of Biological Sciences, University of Queensland, St Lucia, 10 QLD 4072, Australia 11 3RSPB, Dunedin House, 25 Ravelston Terrace, Edinburgh, EH4 3TP, UK 12 4 Percy FitzPatrick Institute of African Ornithology, DST/NRF Centre of Excellence, 13 University of Cape Town, Rondebosch, 7701, Cape Town, South Africa. 14 5ACES, University of Aberdeen and Macaulay Land Use Research Institute, 23 St Machar 15 Drive, Aberdeen, AB24 2TZ, UK 16 *corresponding author 17 Email: [email protected] 18 19 Uncovering the mechanisms involved in the decline of long-distance migrants remains one of 20 the most prominent issues in European conservation. Since the 1980s the British breeding 21 population of Garden Warbler Sylvia borin has declined by more than 25%. Here we use data 22 from the Repeat Woodland Bird Survey to show that while the overall population is in 23 decline, the probability of occupancy for this species increased at high latitudes and 24 decreased at low latitudes between the 1980s and 2003-4. Range shifts such as this arise from 25 a change in the ratio of colonisations to extinctions at the range margins, and we therefore 1 26 relate colonisation and local extinction at the patch level to concurrent changes in climate and 27 habitat. -

Turnover Dynamics of Breeding Land Birds on Islands: Is Island Biogeographic Theory ‘True but Trivial’ Over Decadal Time-Scales? †
diversity Article Turnover Dynamics of Breeding Land Birds on Islands: is Island Biogeographic Theory ‘True but Trivial’ over Decadal Time-Scales? † Duncan McCollin Landscape and Biodiversity Research Group, Faculty of Arts, Science and Technology, The University of Northampton, Avenue Campus, Northampton NN2 6JD, UK; [email protected]; Tel.: +44-016-048-93364 † This paper is based on a talk entitled ‘Turnover dynamics of breeding land birds on islands: ‘true but trivial’ over decadal time-scales?’ presented at the ISLAND BIOLOGY–2016—International Conference on Island Evolution, Ecology, and Conservation (18–22 July 2016). Academic Editor: Paulo A. V. Borges Received: 28 October 2016; Accepted: 28 December 2016; Published: 11 January 2017 Abstract: The theory of island biogeography has revolutionised the study of island biology stimulating considerable debate and leading to the development of new advances in related areas. One criticism of the theory is that it is ‘true but trivial’, i.e., on the basis of analyses of annual turnovers of organisms on islands, it has been posited that stochastic turnover mainly comprises rare species, or repeated immigrations and extinctions thereof, and thereby contribute little to the overall ecological dynamics. Here, both the absolute and relative turnover of breeding land birds are analysed for populations on Skokholm, Wales, over census intervals of 1, 3, 6, 12, and 24 years. As expected, over short census intervals (≤6 years), much of the turnover comprised repeated colonisations and extinctions of rare species. However, at longer intervals (12 and 24 years), a sizeable minority of species (11% of the total recorded) showed evidence of colonisation and/or extinction events despite sizeable populations (some upwards of 50 pairs). -

Avian Haemosporidians in the Cattle Egret (Bubulcus Ibis) from Central-Western and Southern Africa: High Diversity and Prevalence
RESEARCH ARTICLE Avian haemosporidians in the cattle egret (Bubulcus ibis) from central-western and southern Africa: High diversity and prevalence 1 2¤a 3 Cynthia M. Villar Couto , Graeme S. Cumming , Gustavo A. LacorteID , Carlos Congrains1, Rafael Izbicki4, Erika Martins Braga5, Cristiano D. Rocha1, Emmanuel Moralez-Silva1, Dominic A. W. Henry2, Shiiwua A. Manu6, Jacinta Abalaka6, 7 7¤b 8 1 Aissa Regalla , Alfredo Simão da Silva , Moussa S. Diop , Silvia N. Del LamaID * a1111111111 1 Departamento de GeneÂtica e EvolucËão, Centro de Ciências BioloÂgicas e da SauÂde,Universidade Federal de São Carlos, São Carlos, SP, Brazil, 2 Percy FitzPatrick Institute, DST/NRF Centre of Excellence, a1111111111 University of Cape Town, Cape Town, South Africa, 3 Departamento de Ciências e Linguagens, Instituto a1111111111 Federal de Minas Gerais, BambuõÂ, MG, Brazil, 4 Departamento de EstatõÂstica, Centro de Ciências Exatas e a1111111111 TecnoloÂgicas,Universidade Federal de São Carlos, Sao Carlos, SP, Brazil, 5 Departamento de Parasitologia, a1111111111 Instituto de Ciências BioloÂgicas, Universidade Federal de Minas Gerais, Belo Horizonte, MG, Brazil, 6 A.P Leventis Ornithological Research Institute, Laminga, Jos, Nigeria, 7 Instituto da Biodiversidade e das AÂ reas Protegidas (IBAP), Bissau, Rep. da GuineÂ-Bissau, 8 AfriWet Consultants, Dakar, Thiaroye, Senegal ¤a Current address: ARC Centre of Excellence for Coral Reef Studies, James Cook University, Townsville, Queensland, Australia OPEN ACCESS ¤b Current address: Programme de l'UICN en GuineÂe-Bissau, Bissau, Rep. da GuineÂ-Bissau * [email protected] Citation: Villar Couto CM, Cumming GS, Lacorte GA, Congrains C, Izbicki R, Braga EM, et al. (2019) Avian haemosporidians in the cattle egret (Bubulcus ibis) from central-western and southern Abstract Africa: High diversity and prevalence. -

Biological Invasions and Natural Colonisations
A peer-reviewed open-access journal NeoBiota 29: 1–14 (2016)Biological invasions and natural colonisations: are they that different? 1 doi: 10.3897/neobiota.29.6959 DISCUSSION PAPER NeoBiota http://neobiota.pensoft.net Advancing research on alien species and biological invasions Biological invasions and natural colonisations: are they that different? Benjamin D. Hoffmann1, Franck Courchamp2, 3 1 CSIRO, Land and Water Flagship, Tropical Ecosystems Research Centre, PMB 44, Winnellie, Northern Territory, Australia, 0822 2 Ecologie, Systématique & Evolution, Univ. Paris-Sud, CNRS, AgroParisTech, Université Paris-Saclay, 91400, Orsay, France 3 Current address: Department of Ecology and Evolutionary Biology, and Center for Tropical Research, Institute of the Environment and Sustainability, University of Cali- fornia Los Angeles, CA 90095, USA Corresponding author: Benjamin D. Hoffmann ([email protected]) Academic editor: Ingolf Kühn | Received 26 October 2015 | Accepted 18 February 2016 | Published 16 March 2016 Citation: Hoffmann BD, Courchamp F (2016) Biological invasions and natural colonisations: are they that different? NeoBiota 29: 1–14. doi: 10.3897/neobiota.29.6959 Abstract We argue that human-mediated invasions are part of the spectrum of species movements, not a unique phenomenon, because species self-dispersing into novel environments are subject to the same barriers of survival, reproduction, dispersal and further range expansion as those assisted by people. Species changing their distributions by human-mediated and non-human mediated modes should be of identical scientific interest to invasion ecology and ecology. Distinctions between human-mediated invasions and natural col- onisations are very valid for management and policy, but we argue that these are value-laden distinctions and not necessarily an appropriate division for science, which instead should focus on distinctions based on processes and mechanisms. -
The Conservation of Biodiversity in a Changing Environment
SEPA THE CONSERVATION OF SCOTTISH BIODIVERSITY IN A CHANGING ENVIRONMENT March 2007 EnviroCentre Craighall Business Park Project Manager Dr. Andy McMullen Eagle Street Glasgow Project Director Dr. Peter Cosgrove G4 9XA t 0141 341 5040 f 0141 341 5045 w www.envirocentre.co.uk e [email protected] Offices Glasgow Belfast Report No 3093 Stonehaven Daresbury Status : Final Proposal No : 12093p Copy No : 1 Rev. No : 01 1 Table of Contents 1. Summary .............................................................................................................. 3 2. Introduction ......................................................................................................... 6 2.1 Background ..........................................................................................................................................6 2.2 Objectives ............................................................................................................................................7 3. Threats to the biodiversity of scotland ................................................................ 8 3.1 Lack of information ..............................................................................................................................8 3.2 Lack of awareness ............................................................................................................................ 10 3.3 Access to appropriate policy and funding sources .......................................................................... 11 3.4 Direct species