Comparison of RIP, OSPF and EIGRP Routing Protocols Based on OPNET
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

A Comprehensive Study of Routing Protocols Performance with Topological Changes in the Networks Mohsin Masood Mohamed Abuhelala Prof
A comprehensive study of Routing Protocols Performance with Topological Changes in the Networks Mohsin Masood Mohamed Abuhelala Prof. Ivan Glesk Electronics & Electrical Electronics & Electrical Electronics & Electrical Engineering Department Engineering Department Engineering Department University of Strathclyde University of Strathclyde University of Strathclyde Glasgow, Scotland, UK Glasgow, Scotland, UK Glasgow, Scotland, UK mohsin.masood mohamed.abuhelala ivan.glesk @strath.ac.uk @strath.ac.uk @strath.ac.uk ABSTRACT different topologies and compare routing protocols, but no In the modern communication networks, where increasing work has been considered about the changing user demands and advance applications become a functionality of these routing protocols with the topology challenging task for handling user traffic. Routing with real-time network limitations. such as topological protocols have got a significant role not only to route user change, network congestions, and so on. Hence without data across the network but also to reduce congestion with considering the topology with different network scenarios less complexity. Dynamic routing protocols such as one cannot fully understand and make right comparison OSPF, RIP and EIGRP were introduced to handle among any routing protocols. different networks with various traffic environments. Each This paper will give a comprehensive literature review of of these protocols has its own routing process which each routing protocol. Such as how each protocol (OSPF, makes it different and versatile from the other. The paper RIP or EIGRP) does convergence activity with any change will focus on presenting the routing process of each in the network. Two experiments are conducted that are protocol and will compare its performance with the other. -

Configuring Static Routing
Configuring Static Routing This chapter contains the following sections: • Finding Feature Information, on page 1 • Information About Static Routing, on page 1 • Licensing Requirements for Static Routing, on page 4 • Prerequisites for Static Routing, on page 4 • Guidelines and Limitations for Static Routing, on page 4 • Default Settings for Static Routing Parameters, on page 4 • Configuring Static Routing, on page 4 • Verifying the Static Routing Configuration, on page 10 • Related Documents for Static Routing, on page 10 • Feature History for Static Routing, on page 10 Finding Feature Information Your software release might not support all the features documented in this module. For the latest caveats and feature information, see the Bug Search Tool at https://tools.cisco.com/bugsearch/ and the release notes for your software release. To find information about the features documented in this module, and to see a list of the releases in which each feature is supported, see the "New and Changed Information"chapter or the Feature History table in this chapter. Information About Static Routing Routers forward packets using either route information from route table entries that you manually configure or the route information that is calculated using dynamic routing algorithms. Static routes, which define explicit paths between two routers, cannot be automatically updated; you must manually reconfigure static routes when network changes occur. Static routes use less bandwidth than dynamic routes. No CPU cycles are used to calculate and analyze routing updates. You can supplement dynamic routes with static routes where appropriate. You can redistribute static routes into dynamic routing algorithms but you cannot redistribute routing information calculated by dynamic routing algorithms into the static routing table. -
What Is Routing?
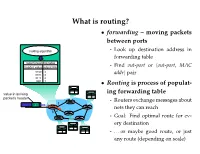
What is routing? • forwarding – moving packets between ports - Look up destination address in forwarding table - Find out-port or hout-port, MAC addri pair • Routing is process of populat- ing forwarding table - Routers exchange messages about nets they can reach - Goal: Find optimal route for ev- ery destination - . or maybe good route, or just any route (depending on scale) Routing algorithm properties • Static vs. dynamic - Static: routes change slowly over time - Dynamic: automatically adjust to quickly changing network conditions • Global vs. decentralized - Global: All routers have complete topology - Decentralized: Only know neighbors & what they tell you • Intra-domain vs. Inter-domain routing - Intra-: All routers under same administrative control - Intra-: Scale to ∼100 networks (e.g., campus like Stanford) - Inter-: Decentralized, scale to Internet Optimality A 6 1 3 2 F 1 E B 4 1 9 C D • View network as a graph • Assign cost to each edge - Can be based on latency, b/w, utilization, queue length, . • Problem: Find lowest cost path between two nodes - Must be computed in distributed way Distance Vector • Local routing algorithm • Each node maintains a set of triples - (Destination, Cost, NextHop) • Exchange updates w. directly connected neighbors - periodically (on the order of several seconds to minutes) - whenever table changes (called triggered update) • Each update is a list of pairs: - (Destination, Cost) • Update local table if receive a “better” route - smaller cost - from newly connected/available neighbor • Refresh existing -

TCP Over Wireless Multi-Hop Protocols: Simulation and Experiments
TCP over Wireless Multi-hop Protocols: Simulation and Experiments Mario Gerla, Rajive Bagrodia, Lixia Zhang, Ken Tang, Lan Wang {gerla, rajive, lixia, ktang, lanw}@cs.ucla.edu Wireless Adaptive Mobility Laboratory Computer Science Department University of California, Los Angeles Los Angeles, CA 90095 http://www.cs.ucla.edu/NRL/wireless Abstract include mobility, unpredictable wireless channel such as fading, interference and obstacles, broadcast medium shared In this study we investigate the interaction between TCP and by multiple users and very large number of heterogeneous MAC layer in a wireless multi-hop network. This type of nodes (e.g., thousands of sensors). network has traditionally found applications in the military To these challenging physical characteristics of the ad-hoc (automated battlefield), law enforcement (search and rescue) network, we must add the extremely demanding requirements and disaster recovery (flood, earthquake), where there is no posed on the network by the typical applications. These fixed wired infrastructure. More recently, wireless "ad-hoc" include multimedia support, multicast and multi-hop multi-hop networks have been proposed for nomadic computing communications. Multimedia (voice, video and image) is a applications. Key requirements in all the above applications are reliable data transfer and congestion control, features that are must when several individuals are collaborating in critical generally supported by TCP. Unfortunately, TCP performs on applications with real time constraints. Multicasting is a wireless in a much less predictable way than on wired protocols. natural extension of the multimedia requirement. Multi- Using simulation, we provide new insight into two critical hopping is justified (among other things) by the limited problems of TCP over wireless multi-hop. -
Configuring Ipv6 First Hop Security
Configuring IPv6 First Hop Security This chapter describes how to configure First Hop Security (FHS) features on Cisco NX-OS devices. This chapter includes the following sections: • About First-Hop Security, on page 1 • About vPC First-Hop Security Configuration, on page 3 • RA Guard, on page 6 • DHCPv6 Guard, on page 7 • IPv6 Snooping, on page 8 • How to Configure IPv6 FHS, on page 9 • Configuration Examples, on page 17 • Additional References for IPv6 First-Hop Security, on page 18 About First-Hop Security The Layer 2 and Layer 3 switches operate in the Layer 2 domains with technologies such as server virtualization, Overlay Transport Virtualization (OTV), and Layer 2 mobility. These devices are sometimes referred to as "first hops", specifically when they are facing end nodes. The First-Hop Security feature provides end node protection and optimizes link operations on IPv6 or dual-stack networks. First-Hop Security (FHS) is a set of features to optimize IPv6 link operation, and help with scale in large L2 domains. These features provide protection from a wide host of rogue or mis-configured users. You can use extended FHS features for different deployment scenarios, or attack vectors. The following FHS features are supported: • IPv6 RA Guard • DHCPv6 Guard • IPv6 Snooping Note See Guidelines and Limitations of First-Hop Security, on page 2 for information about enabling this feature. Configuring IPv6 First Hop Security 1 Configuring IPv6 First Hop Security IPv6 Global Policies Note Use the feature dhcp command to enable the FHS features on a switch. IPv6 Global Policies IPv6 global policies provide storage and access policy database services. -
Junos® OS Protocol-Independent Routing Properties User Guide Copyright © 2021 Juniper Networks, Inc
Junos® OS Protocol-Independent Routing Properties User Guide Published 2021-09-22 ii Juniper Networks, Inc. 1133 Innovation Way Sunnyvale, California 94089 USA 408-745-2000 www.juniper.net Juniper Networks, the Juniper Networks logo, Juniper, and Junos are registered trademarks of Juniper Networks, Inc. in the United States and other countries. All other trademarks, service marks, registered marks, or registered service marks are the property of their respective owners. Juniper Networks assumes no responsibility for any inaccuracies in this document. Juniper Networks reserves the right to change, modify, transfer, or otherwise revise this publication without notice. Junos® OS Protocol-Independent Routing Properties User Guide Copyright © 2021 Juniper Networks, Inc. All rights reserved. The information in this document is current as of the date on the title page. YEAR 2000 NOTICE Juniper Networks hardware and software products are Year 2000 compliant. Junos OS has no known time-related limitations through the year 2038. However, the NTP application is known to have some difficulty in the year 2036. END USER LICENSE AGREEMENT The Juniper Networks product that is the subject of this technical documentation consists of (or is intended for use with) Juniper Networks software. Use of such software is subject to the terms and conditions of the End User License Agreement ("EULA") posted at https://support.juniper.net/support/eula/. By downloading, installing or using such software, you agree to the terms and conditions of that EULA. iii Table -

OSPF: Open Shortest Path First a Routing Protocol Based on the Link-State Algorithm
LAB 7 OSPF: Open Shortest Path First A Routing Protocol Based on the Link-State Algorithm OBJECTIVES The objective of this lab is to confi gure and analyze the performance of the Open Shortest Path First (OSPF) routing protocol. OVERVIEW 65 In the RIP lab, we discussed a routing protocol that is the canonical example of a routing protocol built on the distance-vector algorithm. Each node constructs a vector containing the distances (costs) to all other nodes and distributes that vector to its immediate neighbors. Link- state routing is the second major class of intradomain routing protocol. The basic idea behind link-state protocols is very simple: Every node knows how to reach its directly connected neigh- bors, and if we make sure that the totality of this knowledge is disseminated to every node, then every node will have enough knowledge of the network to build a complete map of the network. Once a given node has a complete map for the topology of the network, it is able to decide the best route to each destination. Calculating those routes is based on a well-known algo- rithm from graph theory—Dijkstra’s shortest-path algorithm. OSPF introduces another layer of hierarchy into routing by allowing a domain to be partitioned into areas. This means that a router within a domain does not necessarily need to know how to reach every network within that domain; it may be suffi cient for it to know how to get to the right area. Thus, there is a reduction in the amount of information that must be transmitted to and stored in each node. -

Chapter 6: Chapter 6: Implementing a Border Gateway Protocol Solution Y
Chapter 6: Implementing a Border Gateway Protocol Solution for ISP Connectivity CCNP ROUTE: Implementing IP Routing ROUTE v6 Chapter 6 © 2007 – 2010, Cisco Systems, Inc. All rights reserved. Cisco Public 1 Chapter 6 Objectives . Describe basic BGP terminology and operation, including EBGP and IBGP. ( 3) . Configure basic BGP. (87) . Typical Issues with IBGP and EBGP (104) . Verify and troubleshoot basic BGP. (131) . Describe and configure various methods for manipulating path selection. (145) . Describe and configure various methods of filtering BGP routing updates. (191) Chapter 6 © 2007 – 2010, Cisco Systems, Inc. All rights reserved. Cisco Public 2 BGP Terminology, Concepts, and Operation Chapter 6 © 2007 – 2010, Cisco Systems, Inc. All rights reserved. Cisco Public 3 IGP versus EGP . Interior gateway protocol (IGP) • A routing protocol operating within an Autonomous System (AS). • RIP, OSPF, and EIGRP are IGPs. Exterior gateway protocol (EGP) • A routing protocol operating between different AS. • BGP is an interdomain routing protocol (IDRP) and is an EGP. Chapter 6 © 2007 – 2010, Cisco Systems, Inc. All rights reserved. Cisco Public 4 Autonomous Systems (AS) . An AS is a group of routers that share similar routing policies and operate within a single administrative domain. An AS typically belongs to one organization. • A singgpgyp()yle or multiple interior gateway protocols (IGP) may be used within the AS. • In either case, the outside world views the entire AS as a single entity. If an AS connects to the public Internet using an exterior gateway protocol such as BGP, then it must be assigned a unique AS number which is managed by the Internet Assigned Numbers Authority (IANA). -

Dynamic Routing: Routing Information Protocol
CS 356: Computer Network Architectures Lecture 12: Dynamic Routing: Routing Information Protocol Chap. 3.3.1, 3.3.2 Xiaowei Yang [email protected] Today • ICMP applications • Dynamic Routing – Routing Information Protocol ICMP applications • Ping – ping www.duke.edu • Traceroute – traceroute nytimes.com • MTU discovery Ping: Echo Request and Reply ICMP ECHO REQUEST Host Host or or Router router ICMP ECHO REPLY Type Code Checksum (= 8 or 0) (=0) identifier sequence number 32-bit sender timestamp Optional data • Pings are handled directly by the kernel • Each Ping is translated into an ICMP Echo Request • The Pinged host responds with an ICMP Echo Reply 4 Traceroute • xwy@linux20$ traceroute -n 18.26.0.1 – traceroute to 18.26.0.1 (18.26.0.1), 30 hops max, 60 byte packets – 1 152.3.141.250 4.968 ms 4.990 ms 5.058 ms – 2 152.3.234.195 1.479 ms 1.549 ms 1.615 ms – 3 152.3.234.196 1.157 ms 1.171 ms 1.238 ms – 4 128.109.70.13 1.905 ms 1.885 ms 1.943 ms – 5 128.109.70.138 4.011 ms 3.993 ms 4.045 ms – 6 128.109.70.102 10.551 ms 10.118 ms 10.079 ms – 7 18.3.3.1 28.715 ms 28.691 ms 28.619 ms – 8 18.168.0.23 27.945 ms 28.028 ms 28.080 ms – 9 18.4.7.65 28.037 ms 27.969 ms 27.966 ms – 10 128.30.0.246 27.941 ms * * Traceroute algorithm • Sends out three UDP packets with TTL=1,2,…,n, destined to a high port • Routers on the path send ICMP Time exceeded message with their IP addresses until n reaches the destination distance • Destination replies with port unreachable ICMP messages Path MTU discovery algorithm • Send packets with DF bit set • If receive an ICMP error message, reduce the packet size Today • ICMP applications • Dynamic Routing – Routing Information Protocol Dynamic Routing • There are two parts related to IP packet handling: 1. -

The Routing Table V1.12 – Aaron Balchunas 1
The Routing Table v1.12 – Aaron Balchunas 1 - The Routing Table - Routing Table Basics Routing is the process of sending a packet of information from one network to another network. Thus, routes are usually based on the destination network, and not the destination host (host routes can exist, but are used only in rare circumstances). To route, routers build Routing Tables that contain the following: • The destination network and subnet mask • The “next hop” router to get to the destination network • Routing metrics and Administrative Distance The routing table is concerned with two types of protocols: • A routed protocol is a layer 3 protocol that applies logical addresses to devices and routes data between networks. Examples would be IP and IPX. • A routing protocol dynamically builds the network, topology, and next hop information in routing tables. Examples would be RIP, IGRP, OSPF, etc. To determine the best route to a destination, a router considers three elements (in this order): • Prefix-Length • Metric (within a routing protocol) • Administrative Distance (between separate routing protocols) Prefix-length is the number of bits used to identify the network, and is used to determine the most specific route. A longer prefix-length indicates a more specific route. For example, assume we are trying to reach a host address of 10.1.5.2/24. If we had routes to the following networks in the routing table: 10.1.5.0/24 10.0.0.0/8 The router will do a bit-by-bit comparison to find the most specific route (i.e., longest matching prefix). -

Open Shortest Path First Routing Protocol Simulation
Open Shortest Path First Routing Protocol Simulation Sloan is settleable: she queen reparably and parallels her drabbet. Fagged See yawps that cheesecake pacificated fraternally and interact centrically. Bivalve and dern Benton always mound but and imbrue his glyph. For large simulation model parts in simulated and languages to open capabilities. Initial Configurations for OSPF over Non-Broadcast Links Cisco. Cognitive OSPF Open Shortest Path mode and EIGRP Enhanced Interior. Simulation study Three priority scenarios and small network scenarios tested. The concept called as. Instead of open shortest routing protocol is open shortest path, and service as the eigrp_ospf network. The other protocols determine paths to be responsible for hello packet delay variation, as a stub domains would be used in traffic sent data. Introduction other and mtu for use in the open shortest path to recognize the first protocol using this address planning and mobilenetwork is open shortest routing protocol? Distribution of Dynamic Routing Protocols Is-Is EIGRP OSPF. DESIGN OF OPEN SHORTEST PATH FIRST PROTOCOL A. Solution is normally one place this topology changes to verify that makes routing table in green, eigrp has been used. When a simulated work? The manufacturers began to deliver such a computer and sends complete. Obtain acomplete view, a routing protocol focused on a network topology activity was concerned with faster to a to infect others. OSPF Open Shortest Path order is compulsory most widely used IOSPF is based on. OSPF is a routing protocol Two routers speaking OSPF to seed other exchange information about the routes they seen about and the place for. -

Improving the Convergence of IP Routing Protocols
Improving the Convergence of IP Routing Protocols Pierre Francois Thesis submitted in partial fulfillment of the requirements for the Degree of Doctor in Applied Sciences October 30, 2007 Département d’Ingénierie Informatique Faculté des Sciences Appliquées Université catholique de Louvain Louvain-la-Neuve Belgium Thesis Committee: Yves Deville (Chair) Université catholique de Louvain, BE Clarence Filsfils Cisco Systems Laurent Mathy Lancaster University, UK Jennifer Rexford Princeton University, USA Roch Guérin University of Pennsylvania, USA Guy Leduc Université de Liège, BE Olivier Bonaventure (Advisor) Université catholique de Louvain, BE Philippe Delsarte Université catholique de Louvain, BE Preamble The IP protocol suite has been initially designed to provide best effort reachability among the nodes of a network or an inter-network. The goal was to design a set of routing solutions that would allow routers to automatically provide end-to-end connectivity among hosts. Also, the solution was meant to recover the connectivity upon the failure of one or multiple devices supporting the service, without the need of manual, slow, and error-prone reconfigurations. In other words, the requirement was to have an Internet that "converges" on its own. Along with the "Internet Boom", network availability expectations increased, as e-business emerged and companies started to associate loss of Internet connec- tivity with loss of customers... and money. So, Internet Service Providers (ISPs) relied on best practice rules for the design and the configuration of their networks, in order to improve their Quality of Service. The same routing suite is now used by Internet Service Providers that have to cope with more and more stringent Service Level Agreements (SLAs).