Increased Use of Available Image Data Decreases Errors in Iris Biometrics
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-
Iris Recognition Border-Crossing System in the UAE
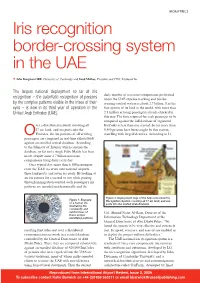
BIOMETRICS Iris recognition border-crossing system in the UAE ❖ John Daugman OBE, University of Cambridge and Imad Malhas, President and CEO, IrisGuard Inc. The largest national deployment so far of iris daily number of iris cross-comparisons performed recognition – the automatic recognition of persons under the UAE expellee tracking and border- by the complex patterns visible in the irises of their crossing control system is about 2.7 billion. It is the eyes – is now in its third year of operation in the first system of its kind in the world, with more than United Arab Emirates (UAE). 2.1 million arriving passengers already checked in this way. The time required for each passenger to be compared against the full database of registered ver a distributed network involving all IrisCodes is less than one second. So far more than 17 air, land, and sea ports into the 9,500 persons have been caught by this system, OEmirates, the iris patterns of all arriving travelling with forged identities. According to Lt. passengers are compared in real-time exhaustively against an enrolled central database. According to the Ministry of Interior which controls the database, so far not a single False Match has been made, despite some 2.7 billion iris cross- comparisons being done every day. On a typical day, more than 6,500 passengers enter the UAE via seven international airports, three land ports, and seven sea ports. By looking at an iris camera for a second or two while passing through immigration control, each passenger's iris patterns are encoded mathematically and the Figure 2: Deployment map of the fully networked Iris Figure 1: Example Recognition System covering all 17 air, land, and sea of a human iris, ports into the United Arab Emirates illustrating the complexity and randomness of Col. -

Expanding Biometric Operations in Law Enforcement to Include
EXPANDING BIOMETRIC COLLECTION IN LAW ENFORCEMENT TO INCLUDE IRIS COLLECTION Approved: Dr. Cheryl Banachowski-Fuller Date: December 6, 2009 Advisor EXPANDING BIOMETRIC OPERATIONS IN LAW ENFORCEMENT TO INCLUDE IRIS COLLECTION A Seminar Paper Presented to the Graduate Faculty University of Wisconsin – Platteville In Partial Fulfillment of the Requirements for the Degree Master of Science in Criminal Justice Jeremiah T. Bruce December 2009 ii Acknowledgements The completion of this paper and degree has been a long endeavor that has finally come to an end, and during this journey there are several people I must acknowledge. To my beautiful wife, Erin, and our wonderful children Alexis and Aiden: Your constant support has been a place in which I draw strength from in all my accomplishments. If it were not for my wife's English and grammar skills, some of my professors might have ripped their hair out when looking over my papers throughout my Masters degree. I can never give enough thanks to my wife for all the things she has done to support my education and my career. To Dr. Cheryl Banachowski-Fuller, she has been my advisor as well as my professor throughout my Masters degree. I thank her for her support in my long degree process, she kept me focused when it was needed, she kept my abreast of my degree goals and was very supportive of me even when I had to postpone my degree to deploy overseas multiple times. To Stephen Cornish, friend and Attorney at Law: You are my best and oldest friend and if it were not for your constant support and competition between each other, I may not have wanted to finish my Masters degree. -

May 10, 2004 USVISIT
May 10, 2004 Announcements • HW 4 on web page, due June 10 • Project presentations: Let’s discuss Iris Recognition • Project report due Tuesday, June 10 Biometrics CSE 190 Lecture 19 CSE190, Spring 2014 CSE190, Spring 2014 Project Presentation Schedule Thursday 6/5 2:00-3:20 in class Anatomy of the eye 1. Disha Chaubey, May Ng, Harmannat Grewal, Recognizing Trees by their Leaves 2. Priyanka Ganapathi, Multimodal biometrics (fingerprints and face) 3. Christopher Laguna, Toeprint recognition 4. Kristoffer Kopperud , Sigurd Lund, Car driver monitoring. 5. Daniel Chan, Daniel Lei – Visual Screen saver Tuesday 6/10 3:00-6:00 during final exam period 1. Nicholas Smith, Back of Hand Recognition 2. Monica Liu, Face Detection 3. Albert Chu, Haohuan Li, Face Recognition in Unconstrained Environments 4. Alexander Fosseidbraaten, Thomas E Dagsvik, Kamilla Bolstad, Fingerprint Scamming- project. 5. Katrina Kalantar, From Palmprint recognition to spoofing palmprints 6. Sam Borden, Diego Marez, Kevan Yuen, Face Detection and Recognition 7. David Shi, Visual Screen Saver 8. Grant Van Horn, Bird Species Classification 9. Andrew Weaver, Attentive Theater Structure of Eye and location of Iris 10. Brian Chung, Ronald Castillo, Acoustic Fingerprinting http://www.maculacenter.com/eyeanatomy.htm CSE190, Spring 2014 Iris Advantages of Iris for Recognition • Believed to be stable over a person’s lifetime • Pattern is epigenetic (not genetically determined) © IEEE Computer 2000 • Internal organ, highly protected and rarely damaged or changed • Iris is the annular -

New Methods in Iris Recognition John Daugman
IEEE TRANSACTIONS ON SYSTEMS, MAN, AND CYBERNETICS—PART B: CYBERNETICS, VOL. 37, NO. 5, OCTOBER 2007 1167 New Methods in Iris Recognition John Daugman Abstract—This paper presents the following four advances in presenting to the camera (e.g., nystagmus or deviated gaze). iris recognition: 1) more disciplined methods for detecting and The demands against false non-matches are also being raised faithfully modeling the iris inner and outer boundaries with active by the development of more tolerant and fluid user interfaces, contours, leading to more flexible embedded coordinate systems; 2) Fourier-based methods for solving problems in iris trigonome- which aim to replace the “stop-and-stare” camera interface with try and projective geometry, allowing off-axis gaze to be handled iris recognition on the move, off-axis, and at a distance [9]. by detecting it and “rotating” the eye into orthographic perspec- These two trends seem to require, paradoxically, that de- tive; 3) statistical inference methods for detecting and excluding cision criteria be used which are simultaneously much more eyelashes; and 4) exploration of score normalizations, depending conservative and liberal than those that are presently deployed. on the amount of iris data that is available in images and the required scale of database search. Statistical results are presented The purpose of this paper is to present four new advances in based on 200 billion iris cross-comparisons that were generated iris recognition that aim to simultaneously improve at both from 632 500 irises in the United Arab Emirates database to extremes. Sections II–IV present new methods of image analyze the normalization issues raised in different regions of processing for iris segmentation, allowing flexible shapes and receiver operating characteristic curves. -

Iris Recognition Is an Automated Method of Biometric Identification
Iris recognition is an automated method of biometric identification that uses mathematical pattern-recognition techniques on video images of the irides of an individual's eyes, whose complex random patterns are unique and can be seen from some distance. Not to be confused with another, less prevalent, ocular-based technology, retina scanning, iris recognition uses camera technology with subtle infrared illumination to acquire images of the detail-rich, intricate structures of the iris. Digital templates encoded from these patterns by mathematical and statistical algorithms allow unambiguous positive identification of an individual. Databases of enrolled templates are searched by matcher engines at speeds measured in the millions of templates per second per (single-core) CPU, and with infinitesimally small False Match rates. Many millions of persons in several countries around the world have been enrolled in iris recognition systems, for convenience purposes such as passport-free automated border-crossings, and some national ID systems based on this technology are being deployed. A key advantage of iris recognition, besides its speed of matching and its extreme resistance to False Matches, is the stability of the iris as an internal, protected, yet externally visible organ of the eye. The core algorithms that underlie iris recognition were developed in the 1990's by Professor John Daugman, Ph.D, OBE (University of Cambridge Computer Laboratory). These were licensed to many developers of commercial iris cameras and systems including LG Electronics, Oki, Panasonic, Sagem, IrisGuard, and Sarnoff Labs. As of 2008, Daugman's algorithms are the basis of all commercially deployed iris recognition systems, although many alternative approaches have been studied and compared in the academic literature in hundreds of publications. -

Deployments at Airports and Border-Crossings
Iris Recognition at Airports and Border-Crossings I 819 13. Ma, L., Tan, T., Wang, Y., Zhang, D.: Personal identification have been enrolled in a preapproved iris database; based on iris texture analysis. IEEE Trans. Pattern Anal. Mach. (2) departing passengers can receive expedited security Intell. 25(12), 1519–1533 (2003) screening and check-in as low-risk travelers if enrolled 14. Ma, L., Wang, Y., Tan, T.: Iris recognition using circular sym- metric filters. In: Proceedings of International Conference on in an iris database following background checks; Pattern Recognition, pp. 414–417 (2002) (3) airline crew members use iris recognition for con- 15. Jain, A.K., Ross, A., Prabhakar, S.: An introduction to biometric trolled access to the secure air-side; (4) airport employ- recognition. IEEE Trans. Circ. Syst. Video Technol. 14(1), 4–20 ees gain access to restricted areas within airports such (2004) as maintenance facilities, baggage handling, and the tarmac; and (5) arriving passengers may be screened against a watch-list database recording the irises of persons deemed dangerous, or of expellees excluded from entering a country. All such existing programs Iris Recognition Algorithms use the Daugman algorithms for iris encoding and recognition because of the need to process iris images fully at the speed of the video frame rate (30frames/s) An iris recognition algorithm is a method of matching and to search databases at speeds of about a million I an iris image to a collection of iris images that exist in a IrisCodes per second, and the need for robustness database. There are many iris recognition algorithms against making False Matches in large database that employ different mathematical ways to perform searches despite so many opportunities. -

Recognition of Nonideal Iris Images Using Shape Guided Approach and Game Theory
Recognition of Nonideal Iris Images Using Shape Guided Approach and Game Theory Kaushik Roy A Thesis in The Department of Computer Science and Software Engineering Presented in Partial Fulfillment of the Requirements for the Degree of Doctor of Philosophy (Computer Science) at Concordia University Montreal, Quebec, Canada April, 2011 © Kaushik Roy, 2011 Concordia University School of Graduate Studies This is to certify that the thesis prepared By: Kaushik Roy Entitled: Recognition of Nonideal Iris Images Using Shape Guided Approach and Game Theory and submitted in the partial fulfillment of the requirements for the degree of Doctor of Philosophy (Computer Science) complies with the regulations of the University and meets the accepted standards with respect to originality and quality. Signed by the final examining committee: Chair Dr. Wahid S. Ghaly Examiner Dr. Tonis Kasvand Examiner Dr. Sudhir P. Mudur Examiner Dr. Abdessamad Ben Hamza External Examiner Dr. Patrick S. P. Wang Supervisor Dr. Prabir Bhattacharya Supervisor Dr. Ching Y. Suen Approved by Chair of Department or Graduate Program Director Dr. Robin Drew, Dean, Faculty of Engineering and Computer Science Abstract Recognition of Nonideal Iris Images Using Shape Guided Approach and Game Theory Kaushik Roy, Ph.D. Concordia University, 2011 Most state-of-the-art iris recognition algorithms claim to perform with a very high recognition accuracy in a strictly controlled environment. However, their recognition accuracies significantly decrease when the acquired images are affected by different noise factors including motion blur, camera diffusion, head movement, gaze direction, camera angle, reflections, contrast, luminosity, eyelid and eyelash occlusions, and problems due to contraction and dilation. -
Doctor of Philosophy in Computer Science Srinivas
A STUDY ON MULTIPLE METHODS OF FINGERPRINT HASH CODE GENERATION BASED ON MD5 ALGORITHM USING MODIFIED FILTERING TECHNIQUES AND MINUTIAE DETAILS Thesis submitted to Srinivas University in Partial Fulfillment of the requirements for the award of the Degree of DOCTOR OF PHILOSOPHY IN COMPUTER SCIENCE By Mr. Krishna Prasad K. Reg. No. SUPHDCOMSC2017/02 Under the Guidance of Dr. P. Sreeramana Aithal, Ph.D., Post Doc. Professor, College of Computer and Information Sciences, Srinivas University, Mangaluru-575001 SRINIVAS UNIVERSITY MUKKA, MANGALURU - 574 146 (KARNATAKA STATE), INDIA MARCH- 2018 Certificate i RESEARCH SUPERVISOR’S REPORT This is to certify that Thesis entitled “A Study on Multiple Methods of Fingerprint Hash Code Generation Based on MD5 Algorithm using Modified Filtering Techniques and Minutiae Details” Submitted to Srinivas University, Mukka, Mangaluru, Karnataka State, India, by Krishna Prasad K., for the award of degree of Doctor of Philosophy in Computer Science is a record of bonafide research work carried out by him under my supervision. The Thesis has reached the standard of the regulations for the degree and it has not been previously formed the basis for the award of any degree, diploma, associateship, fellowship or any other similar title to the candidate or any other person (s). Signature of the Research Supervisor Dr. P. Sreeramana Aithal Professor, College of Computer and Information Sciences, Place: Mangaluru City Campus, Pandeshwar-Mangaluru-575001 Date: 20-03-2018 Karnataka State, India ii Declaration iii Declaration