The Disappearing Human–Machine Divide
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Descargar Libro Completo
2013 2014 2015 2016 Barcelona, 2018 2017 ACTOS INTERNACIONALES EN BARCELONA Real Academia de Ciencias Económicas y Financieras DESAFÍOS DE LA NUEVA SOCIEDAD SOBRECOMPLEJA: HUMANISMO, TRANSHUMANISMO, DATAÍSMO Y OTROS ISMOS CHALLENGES OF THE NEW OVERCOMPLEX SOCIETY: HUMANISM, TRANSHUMANISM, DATAISM AND OTHER ISMS XIII ACTO INTERNACIONAL DE LA REAL ACADEMIA DE CIENCIAS ECONÓMICAS Y FINANCIERAS Barcelona, 15 y 16 de noviembre de 2018 DESAFÍOS DE LA NUEVA SOCIEDAD SOBRECOMPLEJA: HUMANISMO, TRANSHUMANISMO, DATAÍSMO Y OTROS ISMOS XIII Acto Internacional de la Real Academia de Ciencias Económicas y Financieras La realización de esta publicación ha sido posible gracias a con la colaboración de con el patrocinio de 27 de mayo de 2014 DESAFÍOS DE LA NUEVA SOCIEDAD SOBRECOMPLEJA: HUMANISMO, TRANSHUMANISMO, DATAÍSMO Y OTROS ISMOS XIII Acto Internacional de la Real Academia de Ciencias Económicas y Financieras Publicaciones de la Real Academia de Ciencias Económicas y Financieras Real Academia de Ciencias Económicas y Financieras Desafíos de la nueva sociedad sobrecompleja: humanismo, transhumanismo, dataísmo y otros ismos. XIII Acto Internacional / Real Academia de Ciencias Económicas y Financieras. Bibliografía ISBN- 978-84-09-08674-0 I. I. Título II. Gil Aluja, Jaime III. Colección 1. Economía mundial. 2. Tecnología e innovación 3. Biología humana 4. Bigdata La Academia no se hace responsable de las opiniones científicas expuestas en sus propias publicaciones. (Art. 41 del Reglamento) Editora: © Real Academia de Ciencias Económicas y Financieras, Barcelona, 2019 Académico Coordinador: Dra. Anna Maria Gil-Lafuente ISBN- 978-84-09-08674-0 Depósito legal: B 4985-2019 Esta publicación no puede ser reproducida, ni total ni parcialmente, sin permiso previo, por escrito de la editora. -

The Diminishing Human-Machine Interface
The Diminishing Human-Machine Interface KEVIN Summary WARWICK In this article a look is taken at interfaces between technology and the human brain. A practical perspective is taken rather than a theoretical approach with experimentation reported on and Keywords: possible future directions discussed. Applications of this techno- Implant logy are also considered with regard to both therapeutic use and Technology, for human enhancement. The culturing of neural tissue and its Human-Machine embodiment within a robot platform is also discussed, as are oth- Interfaces, Cybernetics, er implant possibilities such as permanent magnet implantation, Systems EEG external electrode monitoring and deep brain stimulation. Engineering, In each case the focus is on practical experimentation results Culturing that have been obtained as opposed to speculative assumptions. Networks Introduction pic are therefore discussed. Points have been raised with a view to near term future technical advances Over the last few years tremendous advances have and what these might mean in a practical scenario. been made in the area of human-computer inter- It has not been the case of an attempt here to pre- action, particularly insofar as interfaces between sent a fully packaged conclusive document, rather technology and the body or brain are concerned. the aim has been to open up the range of research In this article we take a look at some of the different being carried out, see what’s actually involved and ways in which such links can be forged. look at some of its implications. Considered here are several different experiments We start by looking at research into growing brains in linking biology and technology together in a cyber- within a robot body, move on to the Braingate, take netic fashion, essentially ultimately combining hu- in deep brain stimulation and (what is arguably the mans and machines in a relatively permanent mer- most widely recognised) eeg electrode monitoring ger. -

Artificial Consciousness and the Consciousness-Attention Dissociation
Consciousness and Cognition 45 (2016) 210–225 Contents lists available at ScienceDirect Consciousness and Cognition journal homepage: www.elsevier.com/locate/concog Review article Artificial consciousness and the consciousness-attention dissociation ⇑ Harry Haroutioun Haladjian a, , Carlos Montemayor b a Laboratoire Psychologie de la Perception, CNRS (UMR 8242), Université Paris Descartes, Centre Biomédical des Saints-Pères, 45 rue des Saints-Pères, 75006 Paris, France b San Francisco State University, Philosophy Department, 1600 Holloway Avenue, San Francisco, CA 94132 USA article info abstract Article history: Artificial Intelligence is at a turning point, with a substantial increase in projects aiming to Received 6 July 2016 implement sophisticated forms of human intelligence in machines. This research attempts Accepted 12 August 2016 to model specific forms of intelligence through brute-force search heuristics and also reproduce features of human perception and cognition, including emotions. Such goals have implications for artificial consciousness, with some arguing that it will be achievable Keywords: once we overcome short-term engineering challenges. We believe, however, that phenom- Artificial intelligence enal consciousness cannot be implemented in machines. This becomes clear when consid- Artificial consciousness ering emotions and examining the dissociation between consciousness and attention in Consciousness Visual attention humans. While we may be able to program ethical behavior based on rules and machine Phenomenology learning, we will never be able to reproduce emotions or empathy by programming such Emotions control systems—these will be merely simulations. Arguments in favor of this claim include Empathy considerations about evolution, the neuropsychological aspects of emotions, and the disso- ciation between attention and consciousness found in humans. -

VINCENNES-SAINT-DENIS UFR Arts, Philosophie, Esthétique
UNIVERSITE PARIS 8 – VINCENNES-SAINT-DENIS U.F.R Arts, philosophie, esthétique Ecole doctorale : Esthétique, Sciences et Technologies des Arts THESE pour obtenir le grade de DOCTEUR DE L'UNIVERSITE PARIS 8 Discipline : Esthétique, Sciences et Technologies des Arts spécialité Images Numériques présentée et soutenue publiquement par CHANHTHABOUTDY Somphout le 18 novembre 2015 Vanité interactive : recherche et expérimentation artistique _______ Directrice de thèse : Marie-Hélène TRAMUS _______ JURY M. Gilles METHEL, Professeur Université Toulouse 2 Mme Chu-Yin CHEN, Professeure Université Paris 8 Mme Marie-Hélène TRAMUS, Professeure émérite Université Paris 8 Pascal Ruiz, Artiste multimédia 1 2 Résumé Vanité interactive : recherche et expérimentation artistique Ce travail se positionne dans le domaine de l'interactivité sensorielle, de la 3D temps réel et des arts visuels. Cette étude artistique et technique s’inscrit directement dans une recherche entamée depuis des années, sur la question de la représentation sublimée de la mort, qui se retrouve pleinement transfiguré dans l’emblème de la Vanité et sur la recherche de nouvelles façons d’entretenir un dialogue en rétroaction avec l’œuvre. Sur le point artistique, la recherche analyse le processus de création, qui a mené de la représentation sublimée de la mort en vidéo, à la réalisation et l’expérimentation de Vanité au sein de tableaux virtuels interactifs et immersifs. Cette analyse apporte des réponses aux questionnements envers la signification des intentions liées à la création et l’utilisation de Vanité en 3D dans des installations conversationnelles. Elle met en lumière les enjeux de ce procédé innovant par rapport à l’histoire de la Vanité depuis son apparition. -

Towards Chipification: the Multifunctional Body Art of the Net Generation
University of Wollongong Research Online Faculty of Engineering and Information Faculty of Informatics - Papers (Archive) Sciences 1-6-2006 Towards chipification: the multifunctional body art of the Net Generation Katina Michael University of Wollongong, [email protected] M G. Michael University of Wollongong, [email protected] Follow this and additional works at: https://ro.uow.edu.au/infopapers Part of the Physical Sciences and Mathematics Commons Recommended Citation Michael, Katina and Michael, M G.: Towards chipification: the multifunctional body art of the Net Generation 2006. https://ro.uow.edu.au/infopapers/372 Research Online is the open access institutional repository for the University of Wollongong. For further information contact the UOW Library: [email protected] Towards chipification: the multifunctional body art of the Net Generation Abstract This paper considers the trajectory of the microchip within the context of converging disciplines to predict the realm of likely possibilities in the shortterm future of the technology. After presenting the evolutionary development from first generation to fourth generation wearable computing, a case study on medical breakthroughs using implantable devices is presented. The findings of the paper suggest that before too long, implantable devices will become commonplace for everyday humancentric applications. The paradigm shift is exemplified in the use of microchips, from their original purpose in identifying humans and objects to its ultimate trajectory with multifunctional capabilities buried within the body. Keywords wearable computing, chip implants, emerging technologies, culture, smart clothes, biomedicine, biochips, electrophorus Disciplines Physical Sciences and Mathematics Publication Details This paper was originally published as: Michael, K & Michael, MG, Towards chipification: the multifunctional body art of the Net Generation, Cultural Attitudes Towards Technology and Communication 2006 Conference, Murdoch University, Western Australia, 2006, 622-641. -

Superhuman Enhancements Via Implants: Beyond the Human Mind
philosophies Article Superhuman Enhancements via Implants: Beyond the Human Mind Kevin Warwick Office of the Vice Chancellor, Coventry University, Priory Street, Coventry CV1 5FB, UK; [email protected] Received: 16 June 2020; Accepted: 7 August 2020; Published: 10 August 2020 Abstract: In this article, a practical look is taken at some of the possible enhancements for humans through the use of implants, particularly into the brain or nervous system. Some cognitive enhancements may not turn out to be practically useful, whereas others may turn out to be mere steps on the way to the construction of superhumans. The emphasis here is the focus on enhancements that take such recipients beyond the human norm rather than any implantations employed merely for therapy. This is divided into what we know has already been tried and tested and what remains at this time as more speculative. Five examples from the author’s own experimentation are described. Each case is looked at in detail, from the inside, to give a unique personal experience. The premise is that humans are essentially their brains and that bodies serve as interfaces between brains and the environment. The possibility of building an Interplanetary Creature, having an intelligence and possibly a consciousness of its own, is also considered. Keywords: human–machine interaction; implants; upgrading humans; superhumans; brain–computer interface 1. Introduction The future life of superhumans with fantastic abilities has been extensively investigated in philosophy, literature and film. Despite this, the concept of human enhancement can often be merely directed towards the individual, particularly someone who is deemed to have a disability, the idea being that the enhancement brings that individual back to some sort of human norm. -

OWNER's MANUAL. Contents
Contents A-Z OWNER'S MANUAL. MINI. Online Edition for Part no. 01402983336 - X/17 MINI Owner's Manual for the vehicle Thank you for choosing a MINI. The more familiar you are with your vehicle, the better control you will have on the road. We therefore strongly suggest: Read this Owner's Manual before starting off in your new MINI. Also use the Integrated Owner's Manual in your vehicle. It con‐ tains important information on vehicle operation that will help you make full use of the technical features available in your MINI. The manual also contains information designed to en‐ hance operating reliability and road safety, and to contribute to maintaining the value of your MINI. Any updates made after the editorial deadline can be found in the appendix of the printed Owner's Manual for the vehicle. Get started now. We wish you driving fun and inspiration with your MINI. Online Edition for Part no. 01402983336 - X/17 © 2017 Bayerische Motoren Werke Aktiengesellschaft Munich, Germany Reprinting, including excerpts, only with the written consent of BMW AG, Munich. US English ID4 X/17, 11 17 490 Printed on environmentally friendly paper, bleached without chlorine, suitable for recycling. Online Edition for Part no. 01402983336 - X/17 Contents The fastest way to find information on a partic‐ MOBILITY ular topic or item is by using the index, refer to 198 Refueling page 262. 200 Fuel The topics of Navigation, Entertainment, and 202 Wheels and tires Communication can be called up via the follow‐ 223 Engine compartment ing Owner's Manuals: Integrated Owner's 225 Engine oil Manual in the vehicle, Online Owner's Manual, 229 Coolant MINI Driver's Guide app. -

Trabajo De Fin De Máster Biología Sintética. Del
Máster Interuniversitario en Bioética y Bioderecho por la Facultad de Ciencias de la Salud de la Universidad de Las Palmas de Gran Canaria y la Universidad de La Laguna Trabajo de fin de máster Biología Sintética. Del Biohacking al “hágaselo usted mismo” Curso Académico: 2017/2018 Autora: Dña. María del Mar Cortés López Tutor: Dr. D. Emilio José Sanz Álvarez Tenerife, junio de 2018 !1 Para mis padres, Juan Antonio y Cati Por todo !2 BIOLOGÍA SINTÉTICA. DEL BIOHACKING AL HÁGASELO USTED MISMO. “What I cannot create, I do not understand” Richard Feynman ÍNDICE Sumario Objetivos y método de trabajo 1. Introducción 2. Biología Sintética 2.1 Historia 2.2 Panorama actual y futuro 2.3 Líneas de investigación 2.4 Cuestiones que plantea 2.5 Dilema del doble uso 2.6 Aspectos éticos 2.7 Regulación 3. Biohacking 3.1 Origen 3.2 Tipos 3.3 Regulación 3.4 Cuestiones éticas 4. DIYbio 4.1 Aplicaciones 4.2 Riesgos 4.3 Problemas a los que se enfrenta 4.4 Perfil ético 4.5 Regulación Discusión Conclusiones Bibliografía Otras fuentes de referencia !3 SUMARIO Este TFM revisa la Biología sintética, la aparición del “Biohacking”, y el emergente movimiento “hágalo usted mismo” (DIYbio), así como la relación entre éstas. La biología sintética (BS) es una disciplina que combina conceptos de biología e ingeniería, y que ha experimentado un rápido crecimiento en investigación, innovación e interés político en los últimos años. Ésta se basa en la utilización de principios de ingeniería para diseñar nuevos sistemas, organismos o dispositivos, así como en el rediseño de los sistemas biológicos naturales existentes, con el fin de crear algo útil y que no se dé de forma natural. -
An Introduction to Control Systems; K. Warwick
An Introduction to Control Systems; K. Warwick 362 pages; World Scientific, 1996; K. Warwick; 9810225970, 9789810225971; 1996; An Introduction to Control Systems; This significantly revised edition presents a broad introduction to Control Systems and balances new, modern methods with the more classical. It is an excellent text for use as a first course in Control Systems by undergraduate students in all branches of engineering and applied mathematics. The book contains: A comprehensive coverage of automatic control, integrating digital and computer control techniques and their implementations, the practical issues and problems in Control System design; the three-term PID controller, the most widely used controller in industry today; numerous in-chapter worked examples and end-of-chapter exercises. This second edition also includes an introductory guide to some more recent developments, namely fuzzy logic control and neural networks. file download wici.pdf The Breakthrough in Artificial Intelligence; While horror films and science fiction have repeatedly warned of robots running amok, Kevin Warwick takes the threats out of the realm of fiction and into the real world, truly; Computers; K. Warwick; 307 pages; ISBN:0252072235; 1997; March of the Machines Control Bruce O. Watkins; Introduction to control systems; UOM:39015002007683; Technology & Engineering; 625 pages; 1969 Robot Control; ISBN:0863411282; Jan 1, 1988; K. Warwick, Alan Pugh; Technology & Engineering; 238 pages; Theory and Applications Automatic control; ISBN:0750622989; Davinder K. Anand; 730 pages; Since the second edition of this classic text for students and engineers appeared in 1984, the use of computer-aided design software has become an important adjunct to the; Introduction to Control Systems; Jan 1, 1995 An Introduction to Control Systems pdf download 596 pages; Mar 18, 1993; STANFORD:36105004050907; based on the proceedings of a conference on Robotics, applied mathematics and computational aspects; K. -

Implantable Microelectrodes on Soft Substrate with Nanostructured Active Surface for Stimulation and Recording of Brain Activities Valentina Castagnola
Implantable microelectrodes on soft substrate with nanostructured active surface for stimulation and recording of brain activities Valentina Castagnola To cite this version: Valentina Castagnola. Implantable microelectrodes on soft substrate with nanostructured active sur- face for stimulation and recording of brain activities. Micro and nanotechnologies/Microelectronics. Universite Toulouse III Paul Sabatier, 2014. English. tel-01137352 HAL Id: tel-01137352 https://hal.archives-ouvertes.fr/tel-01137352 Submitted on 31 Mar 2015 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. THÈSETHÈSE En vue de l’obtention du DOCTORAT DE L’UNIVERSITÉ DE TOULOUSE Délivré par : l’Université Toulouse 3 Paul Sabatier (UT3 Paul Sabatier) Présentée et soutenue le 18/12/2014 par : Valentina CASTAGNOLA Implantable Microelectrodes on Soft Substrate with Nanostructured Active Surface for Stimulation and Recording of Brain Activities JURY M. Frédéric MORANCHO Professeur d’Université Président de jury M. Blaise YVERT Directeur de recherche Rapporteur Mme Yael HANEIN Professeur d’Université Rapporteur M. Pascal MAILLEY Directeur de recherche Examinateur M. Christian BERGAUD Directeur de recherche Directeur de thèse Mme Emeline DESCAMPS Chargée de Recherche Directeur de thèse École doctorale et spécialité : GEET : Micro et Nanosystèmes Unité de Recherche : Laboratoire d’Analyse et d’Architecture des Systèmes (UPR 8001) Directeur(s) de Thèse : M. -
Artificial Brain Project of Visual Motion
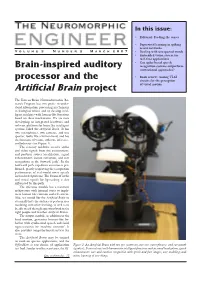
In this issue: • Editorial: Feeding the senses • Supervised learning in spiking neural networks V o l u m e 3 N u m b e r 2 M a r c h 2 0 0 7 • Dealing with unexpected words • Embedded vision system for real-time applications • Can spike-based speech Brain-inspired auditory recognition systems outperform conventional approaches? processor and the • Book review: Analog VLSI circuits for the perception Artificial Brain project of visual motion The Korean Brain Neuroinformatics Re- search Program has two goals: to under- stand information processing mechanisms in biological brains and to develop intel- ligent machines with human-like functions based on these mechanisms. We are now developing an integrated hardware and software platform for brain-like intelligent systems called the Artificial Brain. It has two microphones, two cameras, and one speaker, looks like a human head, and has the functions of vision, audition, inference, and behavior (see Figure 1). The sensory modules receive audio and video signals from the environment, and perform source localization, signal enhancement, feature extraction, and user recognition in the forward ‘path’. In the backward path, top-down attention is per- formed, greatly improving the recognition performance of real-world noisy speech and occluded patterns. The fusion of audio and visual signals for lip-reading is also influenced by this path. The inference module has a recurrent architecture with internal states to imple- ment human-like emotion and self-esteem. Also, we would like the Artificial Brain to eventually have the abilities to perform user modeling and active learning, as well as to be able to ask the right questions both to the right people and to other Artificial Brains. -

ABS: Scanning Neural Networks for Back-Doors by Artificial Brain
ABS: Scanning Neural Networks for Back-doors by Artificial Brain Stimulation Yingqi Liu Wen-Chuan Lee Guanhong Tao [email protected] [email protected] [email protected] Purdue University Purdue University Purdue University Shiqing Ma Yousra Aafer Xiangyu Zhang [email protected] [email protected] [email protected] Rutgers University Purdue University Purdue University ABSTRACT Kingdom. ACM, New York, NY, USA, 18 pages. https://doi.org/10.1145/ This paper presents a technique to scan neural network based AI 3319535.3363216 models to determine if they are trojaned. Pre-trained AI models may contain back-doors that are injected through training or by 1 INTRODUCTION transforming inner neuron weights. These trojaned models operate Neural networks based artificial intelligence models are widely normally when regular inputs are provided, and mis-classify to a used in many applications, such as face recognition [47], object specific output label when the input is stamped with some special detection [49] and autonomous driving [14], demonstrating their pattern called trojan trigger. We develop a novel technique that advantages over traditional computing methodologies. More and analyzes inner neuron behaviors by determining how output acti- more people tend to believe that the applications of AI models vations change when we introduce different levels of stimulation to in all aspects of life is around the corner [7, 8]. With increasing a neuron. The neurons that substantially elevate the activation of a complexity and functionalities, training such models entails enor- particular output label regardless of the provided input is considered mous efforts in collecting training data and optimizing performance.