Notes on Calculus By
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

Ch. 15 Power Series, Taylor Series
Ch. 15 Power Series, Taylor Series 서울대학교 조선해양공학과 서유택 2017.12 ※ 본 강의 자료는 이규열, 장범선, 노명일 교수님께서 만드신 자료를 바탕으로 일부 편집한 것입니다. Seoul National 1 Univ. 15.1 Sequences (수열), Series (급수), Convergence Tests (수렴판정) Sequences: Obtained by assigning to each positive integer n a number zn z . Term: zn z1, z 2, or z 1, z 2 , or briefly zn N . Real sequence (실수열): Sequence whose terms are real Convergence . Convergent sequence (수렴수열): Sequence that has a limit c limznn c or simply z c n . For every ε > 0, we can find N such that Convergent complex sequence |zn c | for all n N → all terms zn with n > N lie in the open disk of radius ε and center c. Divergent sequence (발산수열): Sequence that does not converge. Seoul National 2 Univ. 15.1 Sequences, Series, Convergence Tests Convergence . Convergent sequence: Sequence that has a limit c Ex. 1 Convergent and Divergent Sequences iin 11 Sequence i , , , , is convergent with limit 0. n 2 3 4 limznn c or simply z c n Sequence i n i , 1, i, 1, is divergent. n Sequence {zn} with zn = (1 + i ) is divergent. Seoul National 3 Univ. 15.1 Sequences, Series, Convergence Tests Theorem 1 Sequences of the Real and the Imaginary Parts . A sequence z1, z2, z3, … of complex numbers zn = xn + iyn converges to c = a + ib . if and only if the sequence of the real parts x1, x2, … converges to a . and the sequence of the imaginary parts y1, y2, … converges to b. Ex. -

Topic 7 Notes 7 Taylor and Laurent Series
Topic 7 Notes Jeremy Orloff 7 Taylor and Laurent series 7.1 Introduction We originally defined an analytic function as one where the derivative, defined as a limit of ratios, existed. We went on to prove Cauchy's theorem and Cauchy's integral formula. These revealed some deep properties of analytic functions, e.g. the existence of derivatives of all orders. Our goal in this topic is to express analytic functions as infinite power series. This will lead us to Taylor series. When a complex function has an isolated singularity at a point we will replace Taylor series by Laurent series. Not surprisingly we will derive these series from Cauchy's integral formula. Although we come to power series representations after exploring other properties of analytic functions, they will be one of our main tools in understanding and computing with analytic functions. 7.2 Geometric series Having a detailed understanding of geometric series will enable us to use Cauchy's integral formula to understand power series representations of analytic functions. We start with the definition: Definition. A finite geometric series has one of the following (all equivalent) forms. 2 3 n Sn = a(1 + r + r + r + ::: + r ) = a + ar + ar2 + ar3 + ::: + arn n X = arj j=0 n X = a rj j=0 The number r is called the ratio of the geometric series because it is the ratio of consecutive terms of the series. Theorem. The sum of a finite geometric series is given by a(1 − rn+1) S = a(1 + r + r2 + r3 + ::: + rn) = : (1) n 1 − r Proof. -

11.3-11.4 Integral and Comparison Tests
11.3-11.4 Integral and Comparison Tests The Integral Test: Suppose a function f(x) is continuous, positive, and decreasing on [1; 1). Let an 1 P R 1 be defined by an = f(n). Then, the series an and the improper integral 1 f(x) dx either BOTH n=1 CONVERGE OR BOTH DIVERGE. Notes: • For the integral test, when we say that f must be decreasing, it is actually enough that f is EVENTUALLY ALWAYS DECREASING. In other words, as long as f is always decreasing after a certain point, the \decreasing" requirement is satisfied. • If the improper integral converges to a value A, this does NOT mean the sum of the series is A. Why? The integral of a function will give us all the area under a continuous curve, while the series is a sum of distinct, separate terms. • The index and interval do not always need to start with 1. Examples: Determine whether the following series converge or diverge. 1 n2 • X n2 + 9 n=1 1 2 • X n2 + 9 n=3 1 1 n • X n2 + 1 n=1 1 ln n • X n n=2 Z 1 1 p-series: We saw in Section 8.9 that the integral p dx converges if p > 1 and diverges if p ≤ 1. So, by 1 x 1 1 the Integral Test, the p-series X converges if p > 1 and diverges if p ≤ 1. np n=1 Notes: 1 1 • When p = 1, the series X is called the harmonic series. n n=1 • Any constant multiple of a convergent p-series is also convergent. -

Formal Power Series - Wikipedia, the Free Encyclopedia
Formal power series - Wikipedia, the free encyclopedia http://en.wikipedia.org/wiki/Formal_power_series Formal power series From Wikipedia, the free encyclopedia In mathematics, formal power series are a generalization of polynomials as formal objects, where the number of terms is allowed to be infinite; this implies giving up the possibility to substitute arbitrary values for indeterminates. This perspective contrasts with that of power series, whose variables designate numerical values, and which series therefore only have a definite value if convergence can be established. Formal power series are often used merely to represent the whole collection of their coefficients. In combinatorics, they provide representations of numerical sequences and of multisets, and for instance allow giving concise expressions for recursively defined sequences regardless of whether the recursion can be explicitly solved; this is known as the method of generating functions. Contents 1 Introduction 2 The ring of formal power series 2.1 Definition of the formal power series ring 2.1.1 Ring structure 2.1.2 Topological structure 2.1.3 Alternative topologies 2.2 Universal property 3 Operations on formal power series 3.1 Multiplying series 3.2 Power series raised to powers 3.3 Inverting series 3.4 Dividing series 3.5 Extracting coefficients 3.6 Composition of series 3.6.1 Example 3.7 Composition inverse 3.8 Formal differentiation of series 4 Properties 4.1 Algebraic properties of the formal power series ring 4.2 Topological properties of the formal power series -

7. Properties of Uniformly Convergent Sequences
46 1. THE THEORY OF CONVERGENCE 7. Properties of uniformly convergent sequences Here a relation between continuity, differentiability, and Riemann integrability of the sum of a functional series or the limit of a functional sequence and uniform convergence is studied. 7.1. Uniform convergence and continuity. Theorem 7.1. (Continuity of the sum of a series) N The sum of the series un(x) of terms continuous on D R is continuous if the series converges uniformly on D. ⊂ P Let Sn(x)= u1(x)+u2(x)+ +un(x) be a sequence of partial sum. It converges to some function S···(x) because every uniformly convergent series converges pointwise. Continuity of S at a point x means (by definition) lim S(y)= S(x) y→x Fix a number ε> 0. Then one can find a number δ such that S(x) S(y) <ε whenever 0 < x y <δ | − | | − | In other words, the values S(y) can get arbitrary close to S(x) and stay arbitrary close to it for all points y = x that are sufficiently close to x. Let us show that this condition follows6 from the hypotheses. Owing to the uniform convergence of the series, given ε > 0, one can find an integer m such that ε S(x) Sn(x) sup S Sn , x D, n m | − |≤ D | − |≤ 3 ∀ ∈ ∀ ≥ Note that m is independent of x. By continuity of Sn (as a finite sum of continuous functions), for n m, one can also find a number δ > 0 such that ≥ ε Sn(x) Sn(y) < whenever 0 < x y <δ | − | 3 | − | So, given ε> 0, the integer m is found. -

Symmetric Rigidity for Circle Endomorphisms with Bounded Geometry
SYMMETRIC RIGIDITY FOR CIRCLE ENDOMORPHISMS WITH BOUNDED GEOMETRY JOHN ADAMSKI, YUNCHUN HU, YUNPING JIANG, AND ZHE WANG Abstract. Let f and g be two circle endomorphisms of degree d ≥ 2 such that each has bounded geometry, preserves the Lebesgue measure, and fixes 1. Let h fixing 1 be the topological conjugacy from f to g. That is, h ◦ f = g ◦ h. We prove that h is a symmetric circle homeomorphism if and only if h = Id. Many other rigidity results in circle dynamics follow from this very general symmetric rigidity result. 1. Introduction A remarkable result in geometry is the so-called Mostow rigidity theorem. This result assures that two closed hyperbolic 3-manifolds are isometrically equivalent if they are homeomorphically equivalent [18]. A closed hyperbolic 3-manifold can be viewed as the quotient space of a Kleinian group acting on the open unit ball in the 3-Euclidean space. So a homeomorphic equivalence between two closed hyperbolic 3-manifolds can be lifted to a homeomorphism of the open unit ball preserving group actions. The homeomorphism can be extended to the boundary of the open unit ball as a boundary map. The boundary is the Riemann sphere and the boundary map is a quasi-conformal homeomorphism. A quasi-conformal homeomorphism of the Riemann 2010 Mathematics Subject Classification. Primary: 37E10, 37A05; Secondary: 30C62, 60G42. Key words and phrases. quasisymmetric circle homeomorphism, symmetric cir- arXiv:2101.06870v1 [math.DS] 18 Jan 2021 cle homeomorphism, circle endomorphism with bounded geometry preserving the Lebesgue measure, uniformly quasisymmetric circle endomorphism preserving the Lebesgue measure, martingales. -

Generalizations of the Riemann Integral: an Investigation of the Henstock Integral
Generalizations of the Riemann Integral: An Investigation of the Henstock Integral Jonathan Wells May 15, 2011 Abstract The Henstock integral, a generalization of the Riemann integral that makes use of the δ-fine tagged partition, is studied. We first consider Lebesgue’s Criterion for Riemann Integrability, which states that a func- tion is Riemann integrable if and only if it is bounded and continuous almost everywhere, before investigating several theoretical shortcomings of the Riemann integral. Despite the inverse relationship between integra- tion and differentiation given by the Fundamental Theorem of Calculus, we find that not every derivative is Riemann integrable. We also find that the strong condition of uniform convergence must be applied to guarantee that the limit of a sequence of Riemann integrable functions remains in- tegrable. However, by slightly altering the way that tagged partitions are formed, we are able to construct a definition for the integral that allows for the integration of a much wider class of functions. We investigate sev- eral properties of this generalized Riemann integral. We also demonstrate that every derivative is Henstock integrable, and that the much looser requirements of the Monotone Convergence Theorem guarantee that the limit of a sequence of Henstock integrable functions is integrable. This paper is written without the use of Lebesgue measure theory. Acknowledgements I would like to thank Professor Patrick Keef and Professor Russell Gordon for their advice and guidance through this project. I would also like to acknowledge Kathryn Barich and Kailey Bolles for their assistance in the editing process. Introduction As the workhorse of modern analysis, the integral is without question one of the most familiar pieces of the calculus sequence. -

Uniform Convergence and Differentiation Theorem 6.3.1
Math 341 Lecture #29 x6.3: Uniform Convergence and Differentiation We have seen that a pointwise converging sequence of continuous functions need not have a continuous limit function; we needed uniform convergence to get continuity of the limit function. What can we say about the differentiability of the limit function of a pointwise converging sequence of differentiable functions? 1+1=(2n−1) The sequence of differentiable hn(x) = x , x 2 [−1; 1], converges pointwise to the nondifferentiable h(x) = x; we will need to assume more about the pointwise converging sequence of differentiable functions to ensure that the limit function is differentiable. Theorem 6.3.1 (Differentiable Limit Theorem). Let fn ! f pointwise on the 0 closed interval [a; b], and assume that each fn is differentiable. If (fn) converges uniformly on [a; b] to a function g, then f is differentiable and f 0 = g. Proof. Let > 0 and fix c 2 [a; b]. Our goal is to show that f 0(c) exists and equals g(c). To this end, we will show the existence of δ > 0 such that for all 0 < jx − cj < δ, with x 2 [a; b], we have f(x) − f(c) − g(c) < x − c which implies that f(x) − f(c) f 0(c) = lim x!c x − c exists and is equal to g(c). The way forward is to replace (f(x) − f(c))=(x − c) − g(c) with expressions we can hopefully control: f(x) − f(c) f(x) − f(c) fn(x) − fn(c) fn(x) − fn(c) − g(c) = − + x − c x − c x − c x − c 0 0 − f (c) + f (c) − g(c) n n f(x) − f(c) fn(x) − fn(c) ≤ − x − c x − c fn(x) − fn(c) 0 0 + − f (c) + jf (c) − g(c)j: x − c n n The second and third expressions we can control respectively by the differentiability of 0 fn and the uniformly convergence of fn to g. -

G: Uniform Convergence of Fourier Series
G: Uniform Convergence of Fourier Series From previous work on the prototypical problem (and other problems) 8 < ut = Duxx 0 < x < l ; t > 0 u(0; t) = 0 = u(l; t) t > 0 (1) : u(x; 0) = f(x) 0 < x < l we developed a (formal) series solution 1 1 X X 2 2 2 nπx u(x; t) = u (x; t) = b e−n π Dt=l sin( ) ; (2) n n l n=1 n=1 2 R l nπy with bn = l 0 f(y) sin( l )dy. These are the Fourier sine coefficients for the initial data function f(x) on [0; l]. We have no real way to check that the series representation (2) is a solution to (1) because we do not know we can interchange differentiation and infinite summation. We have only assumed that up to now. In actuality, (2) makes sense as a solution to (1) if the series is uniformly convergent on [0; l] (and its derivatives also converges uniformly1). So we first discuss conditions for an infinite series to be differentiated (and integrated) term-by-term. This can be done if the infinite series and its derivatives converge uniformly. We list some results here that will establish this, but you should consult Appendix B on calculus facts, and review definitions of convergence of a series of numbers, absolute convergence of such a series, and uniform convergence of sequences and series of functions. Proofs of the following results can be found in any reasonable real analysis or advanced calculus textbook. 0.1 Differentiation and integration of infinite series Let I = [a; b] be any real interval. -

Calculus Terminology
AP Calculus BC Calculus Terminology Absolute Convergence Asymptote Continued Sum Absolute Maximum Average Rate of Change Continuous Function Absolute Minimum Average Value of a Function Continuously Differentiable Function Absolutely Convergent Axis of Rotation Converge Acceleration Boundary Value Problem Converge Absolutely Alternating Series Bounded Function Converge Conditionally Alternating Series Remainder Bounded Sequence Convergence Tests Alternating Series Test Bounds of Integration Convergent Sequence Analytic Methods Calculus Convergent Series Annulus Cartesian Form Critical Number Antiderivative of a Function Cavalieri’s Principle Critical Point Approximation by Differentials Center of Mass Formula Critical Value Arc Length of a Curve Centroid Curly d Area below a Curve Chain Rule Curve Area between Curves Comparison Test Curve Sketching Area of an Ellipse Concave Cusp Area of a Parabolic Segment Concave Down Cylindrical Shell Method Area under a Curve Concave Up Decreasing Function Area Using Parametric Equations Conditional Convergence Definite Integral Area Using Polar Coordinates Constant Term Definite Integral Rules Degenerate Divergent Series Function Operations Del Operator e Fundamental Theorem of Calculus Deleted Neighborhood Ellipsoid GLB Derivative End Behavior Global Maximum Derivative of a Power Series Essential Discontinuity Global Minimum Derivative Rules Explicit Differentiation Golden Spiral Difference Quotient Explicit Function Graphic Methods Differentiable Exponential Decay Greatest Lower Bound Differential -
Lecture 15-16 : Riemann Integration Integration Is Concerned with the Problem of finding the Area of a Region Under a Curve
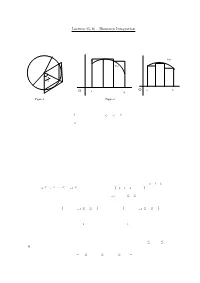
1 Lecture 15-16 : Riemann Integration Integration is concerned with the problem of ¯nding the area of a region under a curve. Let us start with a simple problem : Find the area A of the region enclosed by a circle of radius r. For an arbitrary n, consider the n equal inscribed and superscibed triangles as shown in Figure 1. f(x) f(x) π 2 n O a b O a b Figure 1 Figure 2 Since A is between the total areas of the inscribed and superscribed triangles, we have nr2sin(¼=n)cos(¼=n) · A · nr2tan(¼=n): By sandwich theorem, A = ¼r2: We will use this idea to de¯ne and evaluate the area of the region under a graph of a function. Suppose f is a non-negative function de¯ned on the interval [a; b]: We ¯rst subdivide the interval into a ¯nite number of subintervals. Then we squeeze the area of the region under the graph of f between the areas of the inscribed and superscribed rectangles constructed over the subintervals as shown in Figure 2. If the total areas of the inscribed and superscribed rectangles converge to the same limit as we make the partition of [a; b] ¯ner and ¯ner then the area of the region under the graph of f can be de¯ned as this limit and f is said to be integrable. Let us de¯ne whatever has been explained above formally. The Riemann Integral Let [a; b] be a given interval. A partition P of [a; b] is a ¯nite set of points x0; x1; x2; : : : ; xn such that a = x0 · x1 · ¢ ¢ ¢ · xn¡1 · xn = b. -

Bounded Holomorphic Functions of Several Variables
Bounded holomorphic functions of several variables Gunnar Berg Introduction A characteristic property of holomorphic functions, in one as well as in several variables, is that they are about as "rigid" as one can demand, without being iden- tically constant. An example of this rigidity is the fact that every holomorphic function element, or germ of a holomorphic function, has associated with it a unique domain, the maximal domain to which the function can be continued. Usually this domain is no longer in euclidean space (a "schlicht" domain), but lies over euclidean space as a many-sheeted Riemann domain. It is now natural to ask whether, given a domain, there is a holomorphic func- tion for which it is the domain of existence, and for domains in the complex plane this is always the case. This is a consequence of the Weierstrass product theorem (cf. [13] p. 15). In higher dimensions, however, the situation is different, and the domains of existence, usually called domains of holomorphy, form a proper sub- class of the class of aU domains, which can be characterised in various ways (holo- morphic convexity, pseudoconvexity etc.). To obtain a complete theory it is also in this case necessary to consider many-sheeted domains, since it may well happen that the maximal domain to which all functions in a given domain can be continued is no longer "schlicht". It is possible to go further than this, and ask for quantitative refinements of various kinds, such as: is every domain of holomorphy the domain of existence of a function which satisfies some given growth condition? Certain results in this direction have been obtained (cf.