Methods for Assimilating Remotely-Sensed Water Storage Changes Into Hydrological Models
Total Page:16
File Type:pdf, Size:1020Kb
Load more
Recommended publications
-

(Frankfurt Hydrology Paper;
18 Global irrigation in the 20th century: Extension of the WaterGAP Global Irrigation Model (GIM) with the spatially explicit Historical Irrigation Data set (HID) Felix Theodor PORTMANN 2017 Frankfurt Hydrology Paper Frankfurt Hydrology Papers: 01 A Digital Global Map of Irrigated Areas - An Update for Asia 02 Global-Scale Modeling of Nitrogen Balances at the Soil Surface 03 Global-Scale Estimation of Diffuse Groundwater Recharge 04 A Digital Global Map of Artificially Drained Agricultural Areas 05 Irrigation in Africa, Europe and Latin America - Update of the Digital Global Map of Irrigation Areas to Version 4 06 Global data set of monthly growing areas of 26 irrigated crops 07 The Global Crop Water Model (GCWM): Documentation and first results for irrigated crops 08 Towards mapping the extent of irrigation in the last century: time series of irrigated area per country 09 Global estimation of monthly irrigated and rainfed crop areas on a 5 arc-minute grid 10 Entwicklung der transdisziplinären Methode „Akteursbasierte Modellierung“ und ihre Anwendung im Problemfeld der mobilen, organischen Fremdstoffe 11 Expert-based Bayesian Network modeling for environmental management 12 Anthropogenic river flow alterations and their impacts on freshwater ecosystems in China 13 Design, implementation and evaluation of a participatory strategy development – A regional case study in the problem field of renewable electricity generation 14 Global-scale modelling and quantification of indicators for assessing transboundary aquifers. A contribution to the -

Model-Based Scenarios of Mediterranean Droughts M
Model-based scenarios of Mediterranean droughts M. Weiß, M. Flörke, L. Menzel, J. Alcamo To cite this version: M. Weiß, M. Flörke, L. Menzel, J. Alcamo. Model-based scenarios of Mediterranean droughts. Ad- vances in Geosciences, European Geosciences Union, 2007, 12, pp.145-151. hal-00297036 HAL Id: hal-00297036 https://hal.archives-ouvertes.fr/hal-00297036 Submitted on 2 Nov 2007 HAL is a multi-disciplinary open access L’archive ouverte pluridisciplinaire HAL, est archive for the deposit and dissemination of sci- destinée au dépôt et à la diffusion de documents entific research documents, whether they are pub- scientifiques de niveau recherche, publiés ou non, lished or not. The documents may come from émanant des établissements d’enseignement et de teaching and research institutions in France or recherche français ou étrangers, des laboratoires abroad, or from public or private research centers. publics ou privés. Adv. Geosci., 12, 145–151, 2007 www.adv-geosci.net/12/145/2007/ Advances in © Author(s) 2007. This work is licensed Geosciences under a Creative Commons License. Model-based scenarios of Mediterranean droughts M. Weiß, M. Florke,¨ L. Menzel, and J. Alcamo Center for Environmental Systems Research, University of Kassel, Kurt-Wolters-Str. 3, 34109 Kassel, Germany Received: 1 March 2007 – Revised: 5 June 2007 – Accepted: 21 October 2007 – Published: 2 November 2007 Abstract. This study examines the change in current 100- 2 Purpose of the study year hydrological drought frequencies in the Mediterranean in comparison to the 2070s as simulated by the global model This study will, explicitly for the Mediterranean Region, ex- WaterGAP. -

Global Economic and Food Security Impacts of Demand-Driven Water Scarcity
Global economic and food security impacts of demand-driven water scarcity Victor Nechifor1 UCL Institute for Sustainable Resources Abstract Global freshwater demand will likely continue its expansion under current expectations of economic and population growth. Withdrawals in regions which are already water-scarce will impose further pressure on the renewable water resource base threatening the long-term availability of freshwater across the many economic activities dependent on this resource for various functions. This paper assesses the economy-wide implications of demand-driven water scarcity under the “middle-of-the- road” SSP2 pathway by considering the trade-offs between the macroeconomic and food security impacts. The study employs the RESCU-Water CGE model comprising an advanced level of detail regarding water uses across economic activities and which allows for a sector-specific endogenous adaptation to water scarcity. A sustainable withdrawal threshold is imposed in regions with extended river-basin overexploitation (India, South Asia, Middle East and Northern Africa) whilst different water management options are considered through four alternative allocation methods across users. The scale of macroeconomic effects is dependent on the relative size of sectors with low-water productivity, the size of water uses in these sectors, and the flexibility of important water users to substitute away from water inputs in conditions of scarcity. The largest negative GDP deviations are obtained in scenarios with limited mobility to re-allocate water across users. A significant alleviation is obtained when demand patterns are shifted based on differences in water productivity, however, with a significant imposition on food security prospects. Key words: Computable General Equilibrium, Freshwater withdrawals, Water scarcity, Food security, Economy-wide impacts, Virtual water JEL Classification: D58, Q15, Q17, Q18, Q25, Q56 1 Corresponding author. -

A Global Hydrological Model for Deriving Water Availability Indicators: Model Tuning and Validation
Journal of Hydrology 270 (2003) 105–134 www.elsevier.com/locate/jhydrol A global hydrological model for deriving water availability indicators: model tuning and validation Petra Do¨ll*, Frank Kaspar, Bernhard Lehner Center for Environmental Systems Research, University of Kassel, D-34109 Kassel, Germany Received 4 December 2001; revised 13 August 2002; accepted 30 August 2002 Abstract Freshwater availability has been recognized as a global issue, and its consistent quantification not only in individual river basins but also at the global scale is required to support the sustainable use of water. The WaterGAP Global Hydrology Model WGHM, which is a submodel of the global water use and availability model WaterGAP 2, computes surface runoff, groundwater recharge and river discharge at a spatial resolution of 0.58. WGHM is based on the best global data sets currently available, and simulates the reduction of river discharge by human water consumption. In order to obtain a reliable estimate of water availability, it is tuned against observed discharge at 724 gauging stations, which represent 50% of the global land area and 70% of the actively discharging area. For 50% of these stations, the tuning of one model parameter was sufficient to achieve that simulated and observed long-term average discharges agree within 1%. For the rest, however, additional corrections had to be applied to the simulated runoff and discharge values. WGHM not only computes the long-term average water resources of a country or a drainage basin but also water availability indicators that take into account the interannual and seasonal variability of runoff and discharge. -

Calibration of the Global Hydrological Model WGHM with Water Mass Variations from GRACE Gravity Data
Institute of Geoecology Calibration of the global hydrological model WGHM with water mass variations from GRACE gravity data A dissertation submitted to the Faculty of Mathematics and Natural Sciences at the University of Potsdam, Germany for the degree of Doctor of Natural Sciences (Dr. rer. nat.) in Hydrology by Susanna Werth Submitted: August 20, 2009 Defended: February 17, 2010 Published: March, 2010 Referees Prof. Bruno Merz, University of Potsdam, Institute for Geoecology Prof. Hubert Savenije TU Delft, Civil Engineering and Geosciences Prof. Reinhardt Dietrich, TU Dresden, Institute of Planetary Geodesy Published online at the Institutional Repository of the University of Potsdam: URL http://opus.kobv.de/ubp/volltexte/2010/4173/ URN urn:nbn:de:kobv:517-opus-41738 http://nbn-resolving.org/urn:nbn:de:kobv:517-opus-41738 Author’s declaration I prepared this dissertation without illegal assistance. The work is original except where indicated by special reference in the text and no part of the dissertation has been submitted for any other degree. This dissertation has not been presented to any other University for examination, neither in Germany nor in another country. Susanna Werth Potsdam, August 2009 iii Contents Abstract ix German Abstract xi List of Publications xiii List of Figures xv List of Tables xvii Abbreviations xix 1 Introduction 1 1.1 Interfaces between geodesy and hydrology . .1 1.1.1 The global water cycle . .2 1.1.2 Satellite gravimetry by GRACE . .3 1.1.3 Hydrological prospects from satellite gravimetry . .6 1.2 The WaterGAP Global Hydrological Model (WGHM) . .8 1.3 Model optimisation . 14 1.3.1 Computer models and calibration methods . -

Part a the Millennium Ecosystem Assessment
The Changing Balance of Nature: Findings from the Millennium Ecosystem Assessment Joseph Alcamo Center for Environmental Systems Research, University of Kassel, Germany Lecture at European Union AVEC Summer School Peyresq, France 20.09.05 Part A The Millennium Ecosystem Assessment: Main findings of the first comprehensive global assessment of nature Part B The WaterGAP model: Global modeling for global assessments Part A The Millennium Ecosystem Assessment: Main findings of the first comprehensive global assessment of nature Goals of millennium ecosystem assessment Create a mechanism to increase the amount, quality, and credibility of policy-relevant, scientific research findings concerning ecosystems & human well-being used by decision-makers, particularly those involved in the ecosystem-related conventions. Largest assessment of the status of Earth’s ecosystems Experts and Review Process Prepared by 1360 experts from 95 countries 80-person independent board of review editors Review comments from 850 experts and governments Includes information from 33 sub-global assessments Governance Called for by UN Secretary General in 2000 Authorized by governments through 4 conventions (Biodiversity, Climate, Desertification, Wetlands). Organization Board Assessment Panel Working Group Chairs Support Functions Outreach & Engagement Director, Administration, Logistics, Data Management Sub-Global Assessment Condition Scenarios Response Options Working Group Global Assessment Working Groups Definition of ecosystem services: The benefits society derives from ecosystems The MA Assessment of Condition of Ecosystems Services Findings ... Increases in ecosystem services have brought substantial gains in human well being Since 1960, population doubled, economic activity increased 6-fold, food production increased 2 ½ times, food price has declined, water use doubled, wood harvest for pulp tripled, hydropower doubled. -
Color Maps and Figures
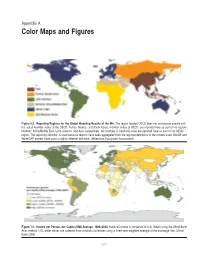
Appendix A Color Maps and Figures Figure 6.3. Reporting Regions for the Global Modeling Results of the MA. The region labeled OECD does not correspond exactly with the actual member states of the OECD. Turkey, Mexico, and South Korea, member states of OECD, are reported here as part of the regions Northern Africa/Middle East, Latin America, and Asia, respectively. All countries in Central Europe are reported here as part of hte OECD region. This reporting definition is used because regions have been aggregated from the regional definitions of the models used. IMAGE and WaterGAP models have used a slightly different definition. (Millennium Ecosystem Assessment) Figure 7.5. Income per Person, per Capita (GNI) Average, 1999–2003. National income is converted to U.S. dollars using the World Bank Atlas method. U.S. dollar values are obtained from domestic currencies using a three-year weighted average of the exchange rate. (World Bank 2003) 517 ................. 11411$ APPA 10-21-05 13:44:38 PS PAGE 517 518 Ecosystems and Human Well-being: Scenarios Figure 7.6a. Average GDP per Capita Annual Growth Rate, 1990–2003 Figure 7.6b. Average GDP Annual Growth Rate, 1990–2003 (Based on data downloaded from the online World Bank database and reported in World Bank 2004.) ................. 11411$ APPA 10-21-05 13:46:32 PS PAGE 518 Color Maps and Figures 519 Figure 7.10. Energy Intensity Changes with Changes in per Capita Income for China, India, Japan, and United States. Historical data for the United States since 1800 are shown. Data are converted from domestic currencies using market exchange rates. -

Chapter 1 Introduction to Climate Change and Water
1 Introduction to climate change and water Section 1 Introduction to climate change and water 1.1 Background these induces a change in another. Anthropogenic climate change adds a major pressure to nations that are already confronting the issue of sustainable freshwater use. The challenges related to The idea of a special IPCC publication dedicated to water freshwater are: having too much water, having too little water, and climate change dates back to the 19th IPCC Session held and having too much pollution. Each of these problems may be in Geneva in April 2002, when the Secretariat of the World exacerbated by climate change. Freshwater-related issues play a Climate Programme – Water and the International Steering pivotal role among the key regional and sectoral vulnerabilities. Committee of the Dialogue on Water and Climate requested Therefore, the relationship between climate change and that the IPCC prepare a Special Report on Water and Climate. freshwater resources is of primary concern and interest. A consultative meeting on Climate Change and Water held in Geneva in November 2002 concluded that the development of So far, water resource issues have not been adequately addressed such a report in 2005 or 2006 would have little value, as it would in climate change analyses and climate policy formulations. quickly be superseded by the Fourth Assessment Report (AR4), Likewise, in most cases, climate change problems have not been which was planned for completion in 2007. Instead, the meeting adequately dealt with in water resources analyses, management recommended the preparation of a Technical Paper on Climate and policy formulation. -

Millennium Ecosystem Assessment
Millennium Ecosystem Assessment Overview The goal of the Millennium Ecosystem Assessment “to establish the scientific basis for actions needed to enhance the contribution of ecosystems to human well-being without undermining their long-term productivity” Millennium Ecosystem Assessment Rapid Global Change: Climate • 1000 to 1861, N. Hemisphere, proxy data; • 1861 to 2000 Global, Instrumental; • 2000 to 2100, SRES projections Millennium Ecosystem Assessment Source: International Geosphere Biosphere Programme (IGBP) Millennium Ecosystem Assessment Growing Demand For Ecosystem Services Food Water Wood Production must One-third of the Wood demand increase to meet population now (fuel, timber) will needs of subject to water double in next 50 additional 3 scarcity. Number years billion people will double over over the next 30 the next 30 years years Millennium Ecosystem Assessment Ecosystem Services The benefits people obtain from ecosystems Provisioning Regulating Cultural Goods produced or Benefits obtained Non-material provided by from regulation of benefits from ecosystems ecosystem ecosystems processes • spiritual • food • recreational • fresh water • climate regulation • aesthetic • fuel wood • disease regulation • inspirational • genetic resources • flood regulation • educational Supporting Services necessary for production of other ecosystem services • Soil formation • Nutrient cycling • Primary production Millennium Ecosystem Assessment Millennium Ecosystem Assessment Seeks to substantially increase the information available for resources -

Description of Problematic Consumptive Water Use Model
Description of problematic consumptive water use model output from WaterGAP2 within ISIMIP2a and ISIMIP2b Hannes Müller Schmied, Tim Trautmann, Petra Döll, Institute of Physical Geography, Goethe- University Frankfurt, August 2018 Background Based on feedback of ISIMIP2b WaterGAP2 model output assessment, we were pointed to negative total actual water consumption (atotuse according to ISIMIP2b protocol) values in some grid cells of India. We investigated this and realized an inconsistent handling of water consumption for some situations. This document describes the problem and provides an overview of grid cells with possible problematic (inconsistent) model output for actual water consumption as well as actual evapotranspiration. Calculation of atotuse in WaterGAP2 and description of the problem In WaterGAP, five water use submodels (for irrigation, domestic, manufacturing, cooling of thermal power plant, livestock) calculate sectoral water withdrawals and water consumption. Since model version WaterGAP 2.2 (i.e. used in ISIMIP2a, ISIMIP2b), WaterGAP distinguishes the source of water (groundwater or surface water) within the sub-module GWSWUSE which computes net abstractions from groundwater (NAg) and net abstractions from surface water (NAs) (see appendix of Müller Schmied et al., 2014). NAg and NAs are input to the WaterGAP Global Hydrology Model WGHM. The linking module GWSWUSE considers return flows for some sectors, but only the irrigation sector is of importance for the inconsistency described here. In case of surface water use for irrigation, a part of the surface water withdrawn is not evapotranspirated but reaches the groundwater as return flow. Therefore, NAg can be negative such that due to irrigation there is an additional man-made recharge to the groundwater. -

Lehner Et Al.: Floods and Droughts in Europe – Climatic Change 1
Lehner et al.: Floods and droughts in Europe – Climatic Change Estimating the impact of global change on flood and drought risks in Europe: a continental, integrated analysis Bernhard Lehner*, Petra Döll, Joseph Alcamo, Thomas Henrichs, Frank Kaspar Center for Environmental Systems Research, University of Kassel, Kurt-Wolters-Straße 3, 34109 Kassel, Germany *Email: [email protected] Abstract Studies on the impact of climate change on water resources and hydrology typically focus either on average precipitation and flows or, when analyzing extreme events such as floods and droughts, on small areas and case studies. At the same time it is acknowledged that climate change may severely alter the risk of hydrological extremes over large regional scales, that changes in precipitation are likely to be amplified in runoff, and that human water use will put additional pressure on future water resources. In an attempt to bridge these various aspects, this paper presents a first continental, integrated analysis of possible impacts of global change – i.e. climate and water use change – on future flood and drought frequencies at a pan-European scale. The global integrated water model WaterGAP is evaluated regarding its capability to simulate high and low flow regimes and is then applied to calculate relative changes in flood and drought frequencies. The results indicate large ‘critical regions’ for which significant changes in flood or drought risk are expected under the proposed global change scenarios. The regions most prone to a rise in flood frequencies are northern to northeastern Europe, while southern and southeastern Europe show significant increases in drought frequencies. -

Hydrological Modeling – Current Status and Future Directions
Draft for Comments Please do not quote Report on Hydrological Modeling – Current Status and Future Directions Prepared for the Center for Excellence in Hydrological Modeling at NIH National Hydrology Project National Institute of Hydrology Roorkee Version 1.0 July 2017 LIST OF CONTENTS Title Page No. CHAPTER-1 SURFACE WATER MODELLING RAINFALL-RUNOFF MODELLING, FLOOD MODELLING AND URBAN HYDROLOGY .................................................................................... 1-67 1.1 Introduction ............................................................................................................................................. 1 1.2 Brief History of Hydrological Models .................................................................................................... 2 1.3 Classification of Hydrological Models ................................................................................................... 4 1.4 Temporal and spatial scale in hydrological modeling............................................................................. 9 1.4.1 Hydrological processes and observational scales ........................................................................ 9 1.5 Hydrological Modelling (Working) Scale ............................................................................................ 11 1.5.1 Point scale .................................................................................................................................. 13 1.5.2 Micro-scale ...............................................................................................................................